一种医疗手术机器人末端急停距离的测量方法及系统与流程
1.本发明涉及医疗手术机器人技术领域,尤其涉及一种医疗手术机器人末端急停距离的测量方法及系统。
背景技术:
2.机器人辅助微创外科手术逐渐成为一个显著的发展趋势。以达芬奇系统为代表的外科手术机器人系统在临床上的成功应用引起了国内外医学界、科技界极大的兴趣。当时,以达芬奇为代表的微创手术机器人逐渐成为国际机器人领域的前沿和研究热点。医疗手术机器人也称为外科手术机器人,其是一种集诸多学科为一体的新型医疗器械,是当前医疗器械信息化、程控化、智能化的一个重要发展方向。医疗手术机器人主要用于脑神经外科手术、心脏外科手术等。与传统手术相比,利用医疗手术机器人做手术有很多明显有点;利用医疗手术机器人做手术时,医生不必接触患者,用影像设备定位病灶后利用其它外科工具实施开口、手术、缝合的动作,医生只需在pc端控制医疗手术机器人完成这些操作。
3.医疗手术机器人执行指令运动过程中,可能会出现预期外的事故,例如医疗手术机器人偏离预设运动路径,此时如不终止医疗手术机器人运动,装载在医疗手术机器人末端的手术工具可能会出现伤害的患者的情况。因此,医疗手术机器人系统设有急停按钮,通过拍下急停按钮,在医疗手术机器人出现偏离运动路径以及其它非预期应用的情况时人为干预中止医疗手术机器人工作,防止患者受到伤害。
4.从医生拍下急停按钮到医疗手术机器人末端完全停止运动的这段时间内,医疗手术机器人末端移动的距离即为急停距离,测量急停距离对于改进医疗手术机器人性能具有重要意义,现有技术中缺少对医疗手术机器人末端急停距离的测量的技术方案。
技术实现要素:
5.有鉴于此,有必要提供一种医疗手术机器人末端急停距离的测量方法及系统,用以解决现有技术中缺少对医疗手术机器人末端急停距离的测量的技术方案的问题。
6.本发明提供一种医疗手术机器人末端急停距离的测量方法,包括以下步骤:
7.接收到急停指令后发送测量触发信号;
8.根据所述测量触发信号获取医疗手术机器人末端的初始位置信息;
9.当所述医疗手术机器人末端停稳后,获取此时所述医疗手术机器人末端的终点位置信息;
10.根据所述医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离。
11.进一步地,在发送所述测量触发信号的同时还发送停止信号,根据所述停止信号控制所述医疗手术机器人末端停止运行。
12.进一步地,根据所述医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离,具体包括,获取医疗手术机器人末端的初始空间坐标与终
点空间坐标之间的欧式距离,以所述欧式距离作为医疗手术机器人末端急停距离。
13.本发明还提供一种医疗手术机器人末端急停距离的测量系统,包括信号源电路、光学测量装置及急停距离获取模块;
14.所述信号源电路,用于接收急停指令,并在接收急停指令后发送触发信号至光学测量装置;
15.所述光学测量装置,用于根据所述测量触发信号获取医疗手术机器人末端的初始位置信息,还用于当所述医疗手术机器人末端停稳后,获取此时所述医疗手术机器人末端的终点位置信息;
16.所述急停距离获取模块,用于根据医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离。
17.进一步地,所述医疗手术机器人末端急停距离的测量系统还包括医疗手术机器人急停开关,所述信号源电路接收急停指令,并在接收急停指令后发送触发信号至光学测量装置,具体包括:医疗手术机器人急停开关发送所述急停指令,所述信号源电路接收急停指令,并在接收急停指令后发送触发信号至光学测量装置。
18.进一步地,所述医疗手术机器人末端急停距离的测量系统还包括医疗手术机器人控制装置,所述信号源电路发送触发信号至光学测量装置的同时,发送控制指令至医疗手术机器人控制装置,所述医疗手术机器人控制装置用于在接收到所述控制指令后控制医疗手术机器人停止运行。
19.进一步地,所述信号源电路在接收急停指令后发送触发信号至光学测量装置,具体包括,所述信号源电路在接收急停指令后发送电平触发信号至光学测量装置。
20.进一步地,所述光学测量装置包括激光跟踪仪、双目摄像机、深度相机。
21.进一步地,在所述医疗手术机器人末端设置有标记球,用于所述光学测量装置对所述医疗手术机器人末端的跟踪测量。
22.进一步地,所述信号源电路包括直流电源及电阻r1
‑
r3,直流电源通过急停按钮接电阻r1的一端,所述电阻r1的另一端通过电阻r2接光学测量装置,所述电阻r1的另一端还通过电阻r3接地。
23.进一步地,所述信号源电路包括直流电源一、直流电源二、电阻r1
‑
r4,所述直流电源一通过急停按钮接电阻r1的一端,所述电阻r1的另一端接通过电阻r3接地,所述电阻r1的另一端还接电阻r2的一端,所述电阻r2的另一端通过电阻r4接直流电源二,所述电阻r2的一端还接光学测量装置。
24.进一步地,所述急停距离获取模块,根据医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离,具体包括,获取医疗手术机器人末端的初始空间坐标与终点空间坐标之间的欧式距离,以所述欧式距离作为医疗手术机器人末端急停距离。
25.与现有技术相比,本发明的有益效果包括:通过接收到一急停指令后发送一测量触发信号;根据所述测量触发信号获取医疗手术机器人末端的初始位置信息;当所述医疗手术机器人末端停稳后,获取此时所述医疗手术机器人末端的终点位置信息;根据所述医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离;实现了对医疗手术机器人末端急停距离的测量。
附图说明
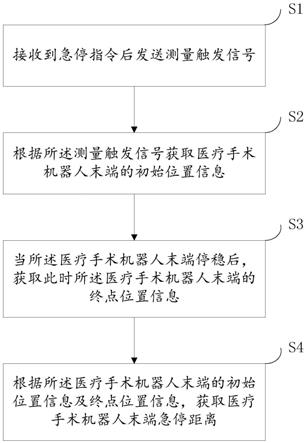
26.图1为本发明提供的医疗手术机器人末端急停距离的测量方法的流程示意图;
27.图2为本发明提供的种医疗手术机器人末端急停距离的测量系统的结构框图;
28.图3为本发明提供的信号源电路的第一电路原理图;
29.图4为本发明提供的信号源电路的第二电路原理图;
30.图5为本发明提供的触发条件及急停距离示意图;
31.图6为本发明提供的医疗手术机器人末端标记示意图。
具体实施方式
32.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
33.实施例1
34.本发明实施例提供了一种医疗手术机器人末端急停距离的测量方法,其流程示意图,如图1所示,所述医疗手术机器人末端急停距离的测量方法,包括以下步骤:
35.s1、接收到急停指令后发送测量触发信号,其中,该急停指令可以是在操作人员拍下急停按钮/急停开关后触发的急停指令、与手术机器人连接的终端控制设备(如计算机、工控机等)发送的模拟急停指令等,在此并不做限定;
36.s2、根据所述测量触发信号获取医疗手术机器人末端的初始位置信息;其中,所述测量触发信号可以为电平信号也可以为无线信号;
37.s3、当所述医疗手术机器人末端停稳后,获取此时所述医疗手术机器人末端的终点位置信息;以拍下急停按钮/急停开关后若干秒,作为所述医疗手术机器人末端停稳的时机,也可以通过相机视觉判断所述医疗手术机器人末端是否停稳;
38.s4、根据所述医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离。以初始位置信息及终点位置信息之间的欧式距离,作为医疗手术机器人末端急停距离。
39.需要说明的是,通过接收到一急停指令后发送一测量触发信号;根据所述测量触发信号获取医疗手术机器人末端的初始位置信息;当所述医疗手术机器人末端停稳后,获取此时所述医疗手术机器人末端的终点位置信息;根据所述医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离;实现了对医疗手术机器人末端急停距离的测量;所述医疗手术机器人末端通常固定器械,所述器械用于进行手术,通过测量医疗手术机器人末端的测量急停距离,对于改进医疗手术机器人性能及防止患者受到伤害具有重要意义。
40.优选的,在发送所述测量触发信号的同时还发送停止信号,根据所述停止信号控制所述医疗手术机器人末端停止运行。所述医疗手术机器人有其相配套的医疗手术机器人控制装置。所述触发信号和停止信号可以为同一信号源的两路信号,同时发送触发信号和停止信号,是为了保证获取医疗手术机器人末端的初始位置信息的准确性,减小初始位置信息的误差。
41.具体实施时,所述医疗手术机器人控制装置根据所述停止信号控制所述医疗手术机器人末端停止运行,所述测量触发信号为电平信号,通过电平翻转控制所述医疗手术机
器人末端停止运行;使电平翻转,具体可为,从输出高变为输出低电平,或是从输出低变为输出高电平。
42.优选的,根据所述医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离,具体包括,获取医疗手术机器人末端的初始空间坐标与终点空间坐标之间的欧式距离,以所述欧式距离作为医疗手术机器人末端急停距离。
43.一个具体实施例中,通过光学测量装置获取所述医疗手术机器人末端的初始位置信息及终点位置信息,具体以光学测量装置的图像坐标系作为位置测量的坐标系,在该坐标系中获取初始空间坐标及终点空间坐标。所述光学测量装置为激光跟踪仪、双目摄像机或深度相机,可选择上述任一一种光学测量装置对获取所述医疗手术机器人末端的初始位置信息及终点位置信息。所述初始空间坐标和终点空间坐标为三维空间坐标,三维空间坐标系包括x轴、y轴以及z轴;获取所述医疗手术机器人末端的初始位置信息及终点位置信息即为获取医疗手术机器人末端在初始位置的三维空间坐标(x1,y1,z1)及医疗手术机器人末端在终点位置的三维空间坐标(x2,y2,z2)。
44.实施例2
45.本发明提供了一种医疗手术机器人末端急停距离的测量方法,包括以下步骤:
46.在按下医疗手术机器人急停开关时发送触发信号至光学测量装置;
47.所述光学测量装置接收到触发信号后获取医疗手术机器人末端的初始位置信息;
48.当医疗手术机器人末端停稳后,所述光学测量装置获取此时医疗手术机器人末端的位置信息,以此位置信息作为医疗手术机器人末端的终点位置信息;
49.根据医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离。
50.需要说明的是,通过在按下医疗手术机器人急停开关时发送触发信号至光学测量装置;所述光学测量装置接收到触发信号后获取医疗手术机器人末端的初始位置信息;当医疗手术机器人末端停稳后,所述光学测量装置获取此时医疗手术机器人末端的位置信息,以此位置信息作为医疗手术机器人末端的终点位置信息;根据医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离;实现了对医疗手术机器人末端急停距离的测量。
51.一个具体实施例中,医疗手术机器人急停开关与信号源电路相连,按下急停开关后,信号源发生电平翻转,具体为,从输出高变为输出低电平,或是从输出低变为输出高电平。在按下医疗手术机器人急停开关时,发送触发信号至光学测量装置的同时向所述医疗手术机器人控制装置发送停止信号。
52.需要说明的是,发送触发信号至光学测量装置的同时向所述医疗手术机器人控制装置发送停止信号,是为了保证光学测量装置获取医疗手术机器人末端的初始位置信息的准确性。
53.在按下医疗手术机器人急停开关时发送触发信号至光学测量装置,具体包括,在按下医疗手术机器人急停开关时触发信号源电路,所述信号源电路将电平触发信号传输至光学测量装置。
54.一个具体实施例中,所述触发信号源电路发送的电平触发信号可以为高电平信号或者低电平信号。所述光学测量装置用于测量医疗手术机器人末端的初始位置信息及终点
位置信息,所述光学测量装置可以为激光跟踪仪、双目摄像机、深度相机等可以获取位置信息的设备。在所述医疗手术机器人末端设置有标记球,用于所述光学测量装置对所述医疗手术机器人末端的跟踪测量。
55.需要说明的是,由于医疗手术机器人的末端不容易判断,在医疗手术机器人的末端设置有标记球,通过所述标记球可以实现医疗手术机器人末端的跟踪测量。根据医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离,具体包括,获取医疗手术机器人末端的初始空间坐标与终点空间坐标之间的欧式距离,以所述欧式距离作为医疗手术机器人末端急停距离。
56.实施例3
57.本发实施例提供了一种医疗手术机器人末端急停距离的测量系统,其结构框图,如图2所示,所述医疗手术机器人末端急停距离的测量系统包括信号源电路1、光学测量装置2及急停距离获取模块3;
58.所述信号源电路1,用于接收急停指令,并在接收急停指令后发送触发信号至光学测量装置2;
59.所述光学测量装置2,用于根据所述测量触发信号获取医疗手术机器人末端的初始位置信息,还用于当所述医疗手术机器人末端停稳后,获取此时所述医疗手术机器人末端的终点位置信息;
60.所述急停距离获取模块3,用于根据医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离。
61.本发明技术方案,通过所述信号源电路接收急停指令,并在接收急停指令后发送触发信号至光学测量装置;通过所述光学测量装置根据所述测量触发信号获取医疗手术机器人末端的初始位置信息,还用于当所述医疗手术机器人末端停稳后,获取此时所述医疗手术机器人末端的终点位置信息;通过所述急停距离获取模块,根据医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离,实现了对医疗手术机器人末端急停距离的测量。
62.具体实施例中,急停距离的测量触发信号通过控制板卡上的电信号触发,控制板卡通过安全总线与医疗手术机器人控制装置相连接,相比于通关软件触发急停(程序执行存在一定延时),可将急停距离从20mm降低至5
‑
10mm。
63.另一个具体实施例中,所述信号源电路在按下医疗手术机器人急停开关时,发送触发信号至光学测量装置和发送触发信号至医疗手术机器人控制装置;所述光学测量装置在收到触发信号后获取医疗手术机器人末端的初始位置信息,还用于在医疗手术机器人末端停稳后,获取此时医疗手术机器人末端的位置信息,并以此位置信息作为医疗手术机器人末端的终点位置信息;所述急停距离获取模块根据医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离。
64.优选的,所述医疗手术机器人末端急停距离的测量系统,还包括医疗手术机器人急停开关,所述信号源电路接收急停指令,并在接收急停指令后发送触发信号至光学测量装置,具体包括:医疗手术机器人急停开关发送所述急停指令,所述信号源电路接收急停指令,并在接收急停指令后发送触发信号至光学测量装置。
65.一个具体实施例中,io触发盒子可以检测电平翻转,触发激光跟踪仪工作,光学测
量装置采集此时的医疗手术机器人末端标记点的空间位置p_star,当医疗手术机器人末端停稳后(在按下医疗手术机器人急停开关5
‑
10s),光学测量装置再次采集医疗手术机器人末端标记点的空间位置p_end,完成医疗手术机器人急停距离测量,急停距离s_distance=|p_star
‑
p_end|;医疗手术机器人控制装置用于控制医疗手术机器人停止工作。
66.优选的,医疗手术机器人末端急停距离的测量系统,还包括医疗手术机器人控制装置,所述信号源电路发送触发信号至光学测量装置的同时,发送控制指令至医疗手术机器人控制装置,所述医疗手术机器人控制装置用于在接收到所述控制指令后控制医疗手术机器人停止运行。
67.需要说明的是,医疗手术机器人控制装置通过运动指令控制手术机器人各个运动关节或驱动电机的工作顺序的时序信号。医疗手术机器人控制装置控制运动关节及医疗手术机器人内部驱动电机,以控制医疗手术机器人停止。在医疗手术机器人中的驱动机构除了驱动电机外还包括齿轮减速器,电机的输出轴通过齿轮减速器与旋转部件连接,以驱动旋转部件转动。其中,齿轮减速器可以包括主动齿轮和从动齿轮,主动齿轮固定地套设在电机的输出轴上,从动齿轮固定地套设在旋转部件。
68.优选的,所述信号源电路在接收急停指令后发送触发信号至光学测量装置,具体包括,所述信号源电路在接收急停指令后发送电平触发信号至光学测量装置。
69.优选的,所述光学测量装置包括激光跟踪仪、双目摄像机、深度相机。
70.另一个具体实施例中,所述光学测量装置包括激光跟踪仪、双目摄像机、深度相机,其中,激光跟踪仪测量精度为可为0.01mm,激光跟踪仪的测量精度远超医疗手术机器人末端急停制动时间制动距离5
‑
10mm;当按下急停按钮到医疗手术机器人机械臂完全停止运动,整过过程约历时0.1s,激光跟踪仪采样率可为1000hz(0.001s),其远高于测量过程中的持续时间,这样使得测量误差足够小;当医疗手术机器人机械臂停止运动时,持续采集医疗手术机器人末端标记装置的位置,可判断机械臂是否完全停止运动。
71.优选的,在所述医疗手术机器人末端设置有标记球,用于所述光学测量装置对所述医疗手术机器人末端的跟踪测量。
72.需要说明的是,由于医疗手术机器人的末端不容易判断,在医疗手术机器人的末端设置有标记球,通过所述标记球可以实现医疗手术机器人末端的跟踪测量。医疗手术机器人末端具体可为医疗手术机器人的末端执行器械,所述末端执行器械设置在医疗手术机器人的操作臂或手臂上;根据不同类型的医疗手术机器人,标记球可安装在机器人末端执行器械上或测量效果的等同位置。
73.优选的,所述信号源电路包括直流电源及电阻r1
‑
r3,直流电源通过急停按钮接电阻r1的一端,所述电阻r1的另一端通过电阻r2接光学测量装置,所述电阻r1的另一端还通过电阻r3接地。
74.需要说明的是,急停按钮可以为继电器开关或者其他开关,若急停按钮断开,则v_out输出低电平,此时医疗手术机器人机械臂在持续运行,若急停按钮关闭,则v_out输出高电平,此时医疗手术机器人机械臂开始停止运行。
75.一个具体实施例中,所述信号源电路的第一电路原理图,如图3所示,所述急停按钮即为急停开关,在图3中的v_out引脚处输出高电平。图3中,电阻r1和r3组成的结构用于分压,电阻r2用于限流,电阻r1
‑
r3的值可以根据实际情况进行设置,或者将电阻r1
‑
r3设置
成滑动电阻,具体实施时,也可以其他电路结构实现分压和限流。
76.优选的,所述信号源电路包括直流电源一、直流电源二、电阻r1
‑
r4,所述直流电源一通过急停按钮接电阻r1的一端,所述电阻r1的另一端接通过电阻r3接地,所述电阻r1的另一端还接电阻r2的一端,所述电阻r2的另一端通过电阻r4接直流电源二,所述电阻r2的一端还接光学测量装置。
77.需要说明的是,若急停按钮断开,则v_out输出低电平,v_ref输出高电平,此时医疗手术机器人机械臂在持续运行,若急停按钮关闭,则v_out输出高电平,v_ref输出低电平,此时医疗手术机器人机械臂开始停止运行。电阻r1和r3组成的结构用于分压,电阻r2用于限流,具体实施时,也可以其他电路结构实现分压和限流。
78.一个具体实施例中,所述信号源电路的第二电路原理图,如图4所示,v_out引脚、直流电源二及电阻r4组成了信号触发电路,v_out引脚输出高电平,所述高电平在信号触发电路中发生跳变,v_ref引脚输出低电平。使用硬件电路的方式触发医疗手术机器人末端初始位置测量,大大减低了信号延迟,提高了医疗手术机器人末端急停距离的测量精度。
79.优选的,所述急停距离获取模块,根据医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离,具体包括,获取医疗手术机器人末端的初始空间坐标与终点空间坐标之间的欧式距离,以所述欧式距离作为医疗手术机器人末端急停距离。
80.一个具体实施例中,所述触发条件及急停距离示意图,如图5所示,图5中,实线表示电平,标注v的虚线为医疗手术机器人末端的运动速度,t1时刻为按下急停按钮时刻,t2时刻为医疗手术机器人末端开始运动的时刻,t3时刻为医疗手术机器人末端停止运动的时刻;当按下急停按钮时,图4中,v_ref发生电平跳变,从高电平跳变到低电平时,触发光学测量装置(激光跟踪仪)动作;急停距离是指t1时刻拍下急停按钮,t2时刻医疗手术机器人响应并开始减速直到t3停止运动,从t1时刻到t3时刻,医疗手术机器人末端位移的距离即为急停距离;医疗手术机器人末端标记示意图,如图6所示,标记装置位于医疗手术机器人末端(图6中的方框),光学测量装置采集的位置信息即为标记装置在空间中的位置信息。
81.本发明公开了一种医疗手术机器人末端急停距离的测量方法及系统,通过接收到一急停指令后发送测量触发信号;根据所述测量触发信号获取医疗手术机器人末端的初始位置信息;当所述医疗手术机器人末端停稳后,获取此时所述医疗手术机器人末端的终点位置信息;根据所述医疗手术机器人末端的初始位置信息及终点位置信息,获取医疗手术机器人末端急停距离;实现了对医疗手术机器人末端急停距离的测量。所述医疗手术机器人末端通常固定器械,所述器械用于进行手术,通过测量医疗手术机器人末端的测量急停距离,对于改进医疗手术机器人性能及防止患者受到伤害具有重要意义。
82.本发明技术方案中,发送触发信号的同时向所述发送停止信号,是为了保证获取医疗手术机器人末端的初始位置信息的准确性,减小初始位置信息的误差;急停距离的测量触发信号通过控制板卡上的电信号触发,控制板卡通过安全总线与医疗手术机器人控制装置相连接,相比于通关软件触发急停(程序执行存在一定延时),可将急停距离从20mm降低至5
‑
10mm,同时,使用硬件电路的方式触发医疗手术机器人末端初始位置测量,大大减低了信号延迟,提高了医疗手术机器人末端急停距离的测量精度;由于医疗手术机器人的末端不容易判断,在医疗手术机器人的末端设置有标记球,通过所述标记球可以实现医疗手
术机器人末端的跟踪测量。
83.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1