一种瓜果自动加工设备及方法与流程
1.本发明涉及一种果蔬自动加工装置,具体为一种瓜果自动加工设备及方法。
背景技术:
2.在果蔬加工过程中,需要将瓜果进行切半,以便于后续加工。然而现有的加工方式是人工对瓜果进行切半,这样不仅耗时耗力,而且效率低下。为了进一步提高加工效率,市面上出现了一种可对瓜果进行自动切半的机器,例如授权公告号为cn203031643u的实用新型专利公开了“一种液压瓜果切半机”,所述液压瓜果切半机包括机架,机架内中部安装有油箱,油箱内安装有过滤器和过滤板,油箱上方安装有电机,过滤器连接到电机,电机前端连接有液压系统,液压系统上方安装有液压缸,液压缸前端连接有推板,推板下方油箱侧边的位置安装有导向杆,导向杆与推板之间连接有导向套,机架上端外侧边安装有刀具,刀具中心高度与推板对齐;刀具中央安装一字形、十字形或米字型刀刃,刀具整体均为不锈钢制成且刀具整体可拆卸更换,可根据瓜果大小选择刀具直径大小。通过液压推板推动瓜果,并在机架侧边安装可更换刀具的结构,能够快速整齐的将瓜果切瓣,由于液压动力大,因此各种瓜果均可切开,且可以更换刀具,切瓣数和直径可随意调整,方便使用。
3.然而上述液压瓜果切半机虽然可以自动完成对瓜果的自动切半,但是切半效果不好,且不能保证瓜果是沿着其中心线切开,为此,对于现有的瓜果切半装置还需要进一步改进。
技术实现要素:
4.本发明在于克服现有技术的不足,提供一种瓜果自动加工设备,所述瓜果自动加工设备可以在对瓜果进行自动切半的过程中实现对待切的瓜果进行定位和对中,使得辊刀可以从瓜果的中部切过,从而保证将瓜果进行均匀切半。
5.本发明的第二个目的在于提供一种瓜果自动加工方法。
6.本发明解决上述技术问题的技术方案是:
7.一种瓜果自动加工设备,包括机架、设置在机架上的进料装置、切半装置、出料装置以及用于将进料装置送进的瓜果依次输送到切半装置和出料装置中的输送装置,其中,
8.所述进料装置设置在所述输送装置的首端,用于将瓜果送进所述输送装置中;
9.所述输送装置包括输送链板以及用于驱动所述输送链板在竖直方向上循环运动的输送驱动机构,其中,所述输送链板上设置有定位槽,所述定位槽为多个,多个定位槽在输送链板上呈矩阵排列;
10.所述切半装置包括辊刀以及用于驱动辊刀转动的切半驱动机构,其中,所述辊刀设置在所述输送链板的上方,所述输送链板的定位槽内设置有用于避让所述辊刀的避让槽;所述避让槽沿着所述输送链板的长度方向自所述定位槽的中部穿过;
11.所述出料装置设置在所述输送装置的末端,用于将输送装置中完成切半工序的瓜果输送到下个加工工位。
12.优选的,所述定位槽的横截面为等腰三角形,所述定位槽的敞口朝向所述切半装置。
13.优选的,所述输送驱动机构包括输送电机以及同步带传动机构,其中,所述输送电机安装在所述机架上,所述同步带传动机构包括主动同步轮,从动同步轮以及环绕在所述主动同步轮和所述从动同步轮上的同步带,其中,所述主动同步轮和所述从动同步轮分别安装在机架的前后两侧;所述主动同步轮与所述输送电机连接;所述输送链板构成所述同步带。
14.优选的,所述同步带传动机构中的主动同步轮和从动同步轮均为两组,两组主动同步轮之间和两组从动同步轮之间分别通过传动轴连接。
15.优选的,所述辊刀为多组,多组辊刀沿着所述输送链板的宽度方向等距排列,且通过转动轴安装在所述机架上;所述切半驱动机构包括齿轮传动机构,所述齿轮传动机构中的两个相互啮合的齿轮分别安装在所述转动轴和所述传动轴上。
16.优选的,所述切半装置还包括卸料挡板,所述卸料挡板安装在所述机架上,且位于相邻两个辊刀之间。
17.优选的,还包括设置在所述机架上的用于去除所述输送链板上的余料的余料去除装置,所述余料去除装置设置在所述机架上,且位于所述输送链板的输送末端;包括风机以及风管,其中,所述风机位于所述机架的下方,所述风管位于所述输送链板的上方,且沿着所述输送链板的宽度方向延伸;所述风管上设置有多个朝向所述输送链板的风嘴,多个风嘴沿着所述风管的长度方向等距排列;所述风管与所述风机连通。
18.优选的,所述输送装置还包括设置在所述输送链板单侧或两侧的瓜果输送机构以及用于将瓜果输送机构中的瓜果逐个搬运到所述输送链板的定位槽上的瓜果搬运机构,其中,所述瓜果输送机构包括输送带以及用于驱动所述输送带在竖直方向循环转动的瓜果输送驱动机构,其中,所述输送带沿着所述输送链板的延伸方向延伸;所述瓜果输送驱动机构包括主动输送辊和从动输送辊,所述主动输送辊和所述从动输送辊分别通过旋转轴安装在所述机架上,其中,用于安装所述主动输送辊的旋转轴与所述传动轴之间通过带传动机构连接。
19.优选的,所述进料装置包括进料斗,所述进料斗安装在所述机架上且位于所述输送装置的首端;该进料斗上设置有阻拦部,所述阻拦部用于防止所述进料斗中的瓜果进入到所述输送链板中;所述出料装置包括出料斗,所述出料斗安装在所述机架上且位于所述输送装置的末端,该出料斗的进料口与所述输送装置的末端连通。
20.一种瓜果自动加工方法,包括以下步骤:
21.(1)、进料装置将待加工的瓜果送进输送装置的输送链板的定位槽内,所述输送驱动机构带动所述输送链板运动至切半工位中;
22.(2)、在输送链板带动瓜果运动的过程中,位于切半工位中的切半驱动机构带动辊刀转动,将定位槽中的瓜果一分为二;
23.(3)、所述输送驱动机构继续带动输送链板运动,当所述输送链板运动到其输送行程的末端后,位于输送链板中的已经完成切半工序的瓜果进入到出料工位中;
24.(4)、位于出料工位中的出料装置将瓜果输送到下个加工工位。
25.本发明与现有技术相比具有以下的有益效果:
26.1、本发明的瓜果自动加工设备通过在输送链板上设置定位槽,实现对瓜果进行定位和对中,当输送链板将瓜果输送到切半工位处时,所述切半驱动机构带动辊刀转动,从而将定位槽中的瓜果从中部切开,从而保证将瓜果进行均匀切半。
27.2、本发明的瓜果自动加工设备可以实现对瓜果进行自动切半,并通过设置定位槽来保证瓜果在实时过程中不发生偏移,从而保证切半的效果。
附图说明
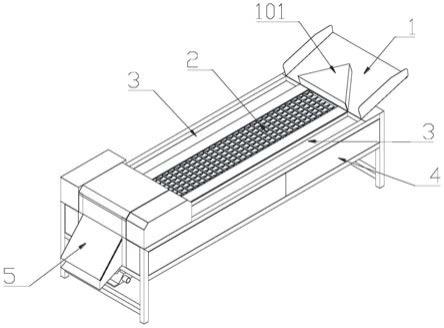
28.图1为本发明的瓜果自动加工设备的立体结构示意图。
29.图2为本发明的瓜果自动加工设备的俯视图。
30.图3为本发明的瓜果自动加工设备的结构简图。
31.图4为切半驱动机构、瓜果输送机构和输送驱动机构的结构简图。
32.图5和图6为切半装置和余料去除装置的两个不同视角的立体结构示意图。
33.图7和图8为切半装置的两个不同视角的立体结构示意图。
34.图9为定位槽的立体结构示意图。
35.图10为定位槽的结构简图。
36.图11和图12为卸料挡板的两个不同视角的立体结构示意图。
具体实施方式
37.下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
38.本发明的瓜果自动加工设备不仅可以实现对瓜果进行切半,还可以实现对果脯、蔬菜、豆制品、甚至是糕点进行切半、切条或切段,例如草莓果脯切半、萝卜切段、淮山切段、芒果干切段、四季豆切段、芒果肉切条、鲜草莓切瓣、果糕切条/切段/切块、豆干切条/切块、腌小番茄和腌黄皮切段/切块、玉米切段、柚皮切段、甘蔗切段、细长类蔬菜切段、番薯切段/切半、莴笋切段、长茄子切段、苦瓜切段/切半、胡萝卜切段、槟榔切半、切无花果等等,以上的待加工的原材料的内部均不含有硬核(例如果核)或硬物,以便于辊刀8将其顺利切开。
39.为了实现对上述内部不含有硬核或硬物的原材料进行加工,本发明的瓜果自动加工设备包括机架4、设置在机架4上的进料装置1、切半装置、出料装置5以及用于将进料装置1送进的瓜果依次输送到切半装置和出料装置5中的输送装置。
40.参见图1
‑
图12,所述输送装置包括输送链板2以及用于驱动所述输送链板2在竖直方向上循环运动的输送驱动机构,其中,
41.所述输送链板2上设置有定位槽201,所述定位槽201为多个,多个定位槽201在输送链板2上呈矩阵排列;在本实施例中,所述定位槽201的横截面为等腰三角形,该定位槽201的敞口朝向所述切半装置;通过将定位槽201设置为等腰三角形结构,使其具有以下优点:在输送链板2运动的过程中,位于所述定位槽201中的瓜果会在惯性的作用下反向运动,直至瓜果与等腰三角形的定位槽201中的两条腰接触,这样,所述输送链板2才会带动瓜果向前运动,在此过程中,由于瓜果与等腰三角形的定位槽201中的两条腰接触,因此也就实现了对瓜果的定位和对中,从而保证辊刀8可以从瓜果的中部切过,进而将瓜果均匀切成两半。另外,等腰三角形结构的定位槽201可以防止瓜果在输送过程中发生左右偏移,进一步
保证切半后的瓜果的均匀性。
42.所述输送驱动机构包括输送电机12以及同步带传动机构,其中,所述输送电机12安装在所述机架4上,所述同步带传动机构包括主动同步轮14,从动同步轮15以及环绕在所述主动同步轮14和所述从动同步轮15上的同步带,其中,所述主动同步轮14和所述从动同步轮15分别安装在机架4的前后两侧;所述主动同步轮14与所述输送电机12连接;所述输送链板2构成所述同步带;
43.在本实施例中,所述同步带传动机构中的主动同步轮14和从动同步轮15均为两组,两组主动同步轮14之间和从动同步轮15之间分别通过传动轴11连接。通过输送电机12带动所述传动轴11转动,从而带动主动同步轮14和从动同步轮15转动,以此带动输送链板2在竖直方向上循环转动,实现对瓜果进行输送。
44.参见图1
‑
图12,所述切半装置包括辊刀8以及用于驱动辊刀8转动的切半驱动机构,其中,
45.所述辊刀8设置在所述输送链板2的上方,所述输送链板2的每个定位槽201内设置有用于避让所述辊刀8的避让槽202;所述避让槽202沿着所述输送链板2的长度方向自所述定位槽201的中部穿过;
46.在本实施例中,所述辊刀8为多组,多组辊刀8沿着所述输送链板2的宽度方向等距排列,且通过转动轴10安装在所述机架4上;所述切半驱动机构包括齿轮传动机构9,所述齿轮传动机构9中的两个相互啮合的齿轮分别安装在所述转动轴10和所述传动轴11上;
47.通过齿轮传动机构9将所述传动轴11的动力传递给所述转动轴10,从而带动所述转动轴10以及设置在所述转动轴10上的辊刀8转动,从而实现对瓜果进行切半。
48.此外,所述辊刀8的数量与所述输送链板2中位于其宽度方向上的定位槽201的数应保持一致。
49.参见图1
‑
图12,所述输送装置还包括设置在所述输送链板2单侧或两侧的瓜果输送机构3以及用于将瓜果输送机构3中的瓜果依次搬运到输送链板2的定位槽201上的瓜果搬运机构,其中,所述瓜果输送机构3包括输送带301以及用于驱动所述输送带301在竖直方向循环转动的瓜果输送驱动机构,其中,所述输送带301沿着所述输送链板2的延伸方向延伸;所述瓜果输送驱动机构包括主动输送辊302和从动输送辊303,所述主动输送辊302和所述从动输送辊303分别通过旋转轴304安装在所述机架4上,其中,用于安装所述主动输送辊302的旋转轴304与所述传动轴11之间通过带传动机构305连接;这样不仅可以保证输送带301和输送链板2同步运动,而且用于切半驱动机构、输送驱动机构和瓜果输送驱动机构三者共用一套动力(即输送电机12和减速器13),这样可以极大地降低本发明的瓜果自动加工设备的制造和使用成本。
50.通过上述设置,所述进料装置1将瓜果送到所述输送带301上,所述瓜果输送驱动机构将瓜果输送到搬运工位中,由瓜果搬运机构逐个将瓜果搬运到所述输送链板2的定位槽201内,以方便后续的切半装置将瓜果进行切半。其中,所述瓜果搬运机构可以采用机械手搬运,或者由人工将输送带301上的瓜果摆放到输送链板2的定位槽201内。
51.在本实施例中,所述瓜果输送机构3为两组,两组瓜果输送机构3设置在所述输送链板2的两侧;两组瓜果输送机构3中的主动输送辊302和从动输送辊303分别位于所述旋转轴304的两侧。对应的,所述瓜果搬运机构可以设置为两组,两组瓜果搬运机构位于所述输
送链板2的两侧;或者分拣工人站在机架4的两侧进行瓜果的摆放工作。
52.参见图1
‑
图12,所述进料装置1设置在所述输送装置的首端,用于将瓜果送进所述输送装置中;该进料装置1包括进料斗,所述进料斗安装在所述机架4上且位于所述输送装置的首端;该进料斗上设置有阻拦部101,所述阻拦部101用于防止所述进料斗中的瓜果进入到所述输送链板2中,该阻拦部101为三角形结构,三角形结构的阻拦部101将进料斗划分出两条进料通道,两条进料通道分别与输送链板2两侧的瓜果输送机构3的输送通道连通,用于将待加工的瓜果送至所述瓜果输送机构3中。
53.参见图1
‑
图12,所述出料装置5设置在所述输送装置的末端,用于将输送装置中完成切半工序的瓜果输送到下个加工工位;该出料装置5包括出料斗,所述出料斗安装在所述机架4上且位于所述输送装置的末端;该出料斗的进料口与所述输送装置的末端连通,完成切半工序的瓜果在输送链板2的输送下进入到出料斗中,由出料斗将其输送到下个工位,例如收集箱中。
54.参见图1
‑
图12,所述切半装置还包括卸料挡板7,所述卸料挡板7安装在所述机架4上,且位于相邻两个辊刀8之间;通过设置所述卸料挡板7,可以去除黏在辊刀8上的余料,以保证辊刀8的锋利。
55.本实施例中的卸料挡板7包括挡板主体以及设置在所述挡板主体上的多块挡块701,多块挡块701沿着所述输送链板2的宽度方向排列,每块挡块701朝着远离挡板主体的方向倾斜向上设置;相邻两块挡块701之间存在间隙,所述挡板主体上设置有凹槽,所述凹槽为多组,每组凹槽与相邻两块挡块701之间的间隙连通,用于构成避让所述辊刀8的刀槽702。通过设置上述结构,在辊刀8转动的过程中,倾斜向上设置的挡块701则会限制辊刀8带动黏在其刀面上的余料向上运动,从而起到去除余料的作用。
56.参见图1
‑
图12,本发明的瓜果自动加工设备还包括设置在所述机架4上的用于去除所述输送链板2上的余料的余料去除装置,所述余料去除装置设置在所述机架4上,且位于所述输送链板2的输送末端;该余料去除装置包括风机以及风管6,其中,所述风机位于所述机架4的下方,所述风管6位于所述输送链板2的上方,且沿着所述输送链板2的宽度方向延伸;所述风管6上设置有多个朝向所述输送链板2的风嘴601,多个风嘴601沿着所述风管6的长度方向等距排列;所述风管6与所述风机连通。通过风管6的风嘴601向输送链板2喷出高压气体,使得粘附在输送链板2上的余料掉入出料斗中。
57.参见图1
‑
图12,本发明的瓜果自动加工设备的工作原理是:
58.工作时,进料装置1将待加工的瓜果输送到瓜果输送机构3的输送带301中,所述瓜果输送驱动机构、输送驱动机构以及切半驱动机构在同一套动力机构的驱动下同步工作,当所述瓜果输送机构3将瓜果送至搬运工位后,所述瓜果搬运机构工作,将输送带301上的瓜果逐个搬运到所述输送链板2的定位槽201内,并由所述输送链板2带动瓜果进入切半工位中,由于所述定位槽201内的瓜果已经实现定位和对中,因此,所述输送链板2带动瓜果穿过所述切半工位的过程中,若是以输送链板2作为参照物,则所述辊刀8沿着所述输送链板2的长度方向自所述定位槽201的中部切过,从而将定位槽201中的瓜果切成两半。完成切半工序的瓜果在输送链板2的带动下到达所述输送链板2的输送行程的末端,即所述输送链板2在竖直方向上的拐弯处,这样,位于输送链板2中的瓜果就会掉入到下方的出料装置5中,由出料装置5将瓜果输送到下个加工工位中。
59.参见图1
‑
图12,本发明的瓜果自动加工方法,包括以下步骤:
60.(1)、进料装置1将待加工的瓜果送进输送装置的输送链板2的定位槽201内,所述输送驱动机构带动所述输送链板2运动至切半工位中;
61.(2)、在输送链板2带动瓜果运动的过程中,位于切半工位中的切半驱动机构带动辊刀8转动,将定位槽201中的瓜果一分为二;
62.(3)、所述输送驱动机构继续带动输送链板2运动,当所述输送链板2运动到其输送行程的末端后,位于输送链板2中的已经完成切半工序的瓜果进入到出料工位中;
63.(4)、位于出料工位中的出料装置5将瓜果输送到下个加工工位。
64.上述为本发明较佳的实施方式,但本发明的实施方式并不受上述内容的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、块合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1