一种电活性聚合物驱动器及其表情机器人
1.本发明属于机器人技术领域,具体涉及一种电活性聚合物驱动器及其表情机器人。
背景技术:
2.随着社会发展,智能机器人开始脱离最初的工业制造机器人的形状和局限,外观上发展成更加的拟人,功能和智能化程度也愈加提高,更能满足各种不同应用环境的需求,从而为机器人技术的研发开辟出更加广阔的发展空间。其中仿人面部表情机器人是当前智能机器人研究的热门之一。预测未来智能机器人将会走进千家万户,因此赋予机器人情感,与之进行生动的情感交互变得尤为重要。因此对于仿人表情机器人的研究对于实现和谐的人机交互有着十分重要的意义。然而在现有的表情机器人领域中大多数都运用电机驱动(如已经公开的发明专利cn202010169291.2),从而造成运动断层,表情僵硬等缺陷,达不到逼真的拟人程度,并且电机驱动本身存在能耗高、噪声大、质量重、占空间、控制和维护难等缺点,不适合应用于表情机器人这种轻巧柔性的工作环境。申请人之前提出的基于凝胶驱动器的表情机器人(cn202010194085.7)存在表情拟人程度不高,表情不够丰富以及驱动模块单元结构在水平方向工作时鲁棒性不高等问题。
技术实现要素:
3.针对以上不足,本发明所要解决的技术问题是提供一种电活性聚合物驱动器及其表情机器人,结构轻便、紧凑,无噪音,能量消耗小,表情更为丰富,并且可以根据需求进行转头、点头等工作。
4.为解决以上技术问题,本发明采用的技术方案是,
5.一种电活性聚合物驱动器,包括驱动器主体、驱动器套壳、传动件和预紧件,驱动器主体、传动件伸缩式安装在驱动器套筒内,传动件与驱动器主体连接,预紧件安装在驱动器套壳上,传动件穿过预紧件伸出驱动器套壳外。
6.进一步的,预紧件包括旋杆、套筒和压板,旋杆、压板分别固定连接在套筒的两端,在套筒内固定安装有直线轴承。
7.进一步的,驱动器套壳内固定连接有导向杆,驱动器主体侧边成形有导向槽,导向槽与导向杆相适配。
8.进一步的,驱动器套壳包括壳体和端盖,端盖可拆式安装在壳体上,端盖上成形有预紧通孔,预紧件通过螺纹可拆式安装在预紧通孔内,壳体侧壁上连接有导线连接部。
9.进一步的,传动件包括端板和传动柱,端板与驱动器主体贴合,传动柱与端板固定连接,传动柱上成型有侧孔和轴向孔。
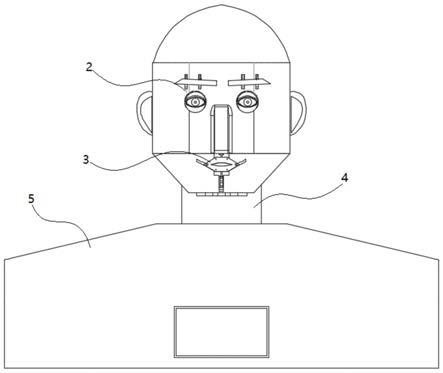
10.一种表情机器人,包括眼部机构、嘴部机构、颈部机构和机器人壳体,机器人壳体套设在眼部机构、嘴部机构、颈部机构的外侧,眼部机构安装在嘴部机构上,嘴部机构安装在颈部机构上,眼部机构、嘴部机构、颈部机构内均安装有上述电活性聚合物驱动器。
11.进一步的,嘴部机构包括嘴唇驱动安装板、嘴唇连杆、上嘴唇驱动件、下嘴唇驱动件和嘴角驱动件,上嘴唇驱动件、下嘴唇驱动件分别固定安装在嘴唇驱动安装板的两侧端面上,上嘴唇驱动件、下嘴唇驱动件与嘴唇连杆连接,驱动嘴唇连杆的中部移动,嘴角驱动件与嘴唇连杆的嘴角连接,驱动嘴唇连杆的嘴角移动。
12.进一步的,颈部机构包括点头驱动件、转头驱动件和头部连接件,头部连接件安装在点头驱动件上,点头驱动件转动安装在转头驱动件上,点头驱动件内安装有转头防干扰装置。
13.进一步的,点头驱动件包括点头板、点头底板和支撑柱,点头板通过铰链转动安装在点头底板上,支撑柱安装在点头底板上,转头防干扰装置固定安装在点头板的下端面上,电活性聚合物驱动器与转动头防干扰装置滑动连接。
14.进一步的,转头驱动件包括转头支架、转头传动件、支撑架和转轴,转轴转动安装在转头支架上,转头传动件与转轴连接,支撑架固定安装在转头支架上,点头底板通过轴承转动安装在转头支架上,转轴与点头底板固定连接。
15.本发明的有益效果是,本机器人可以实现头部各个部位,包括眉毛、眼睑、眼球、嘴巴等拟人化动作,能够实现人类的六大基本表情;同时其颈部可通过上下、左右方向的旋转运动,实现机器人的点头以及转头动作,从而丰富了机器人的情感表达,增强了机器人的拟人化程度。本发明具有结构轻便、紧凑,无噪音,能量消耗小等优点,可以用于家用及医疗陪护型机器人、商业服务型机器人、车载语音机器人及教育示教机器人等的人机交互,有效提高机器与人的亲和度,对于服务型机器人在社会上投入运用有着巨大的意义。
附图说明
16.图1是机器人的结构示意图。
17.图2是隐去机器人壳体后的结构示意图。
18.图3是电活性聚合物驱动器的半剖结构示意图。
19.图4是驱动器主体与传动件连接的结构示意图。
20.图5是壳体的结构示意图。
21.图6是双倍放大器的结构示意图。
22.图7是四倍放大器的结构示意图。
23.图8是头部的结构示意图。
24.图9是眼球的安装结构示意图。
25.图10是图8转过一定角度后的结构示意图。
26.图11是下嘴唇驱动件的结构示意图。
27.图12是嘴唇的结构示意图。
28.图13是颈部机构的结构示意图。
29.图14是转头防干扰装置的结构示意图。
具体实施方式
30.下面结合附图对本发明进行进一步描述。
31.一种电活性聚合物驱动器,包括驱动器主体1
‑
1、驱动器套壳1
‑
2、传动件1
‑
3和预
紧件1
‑
4,驱动器主体1
‑
1、传动件1
‑
3伸缩式安装在驱动器套筒1
‑
2内,传动件1
‑
3与驱动器主体1
‑
1连接,通过驱动器主体1
‑
1的伸缩驱动传动件1
‑
3移动,预紧件1
‑
3安装在驱动器套壳1
‑
2上,传动件1
‑
3穿过预紧件1
‑
4伸出驱动器套壳1
‑
2外,通过预紧件1
‑
4、驱动壳体1
‑
2的设置,使得驱动器主体1
‑
1的移动更为稳定,从而提高本驱动器的传动稳定性,从而提高应用本驱动器机器人运行的稳定性。
32.预紧件1
‑
4包括旋杆1
‑
5、套筒1
‑
6和压板1
‑
7,旋杆1
‑
5、压板1
‑
7分别固定连接在套筒1
‑
6的两端,在套筒1
‑
6内固定安装有直线轴承1
‑
8,在套筒1
‑
6的外侧设有外螺纹,通过旋杆1
‑
5的设置,便于将本预紧件1
‑
4安装至驱动器套壳上,传动件1
‑
3穿设在直线轴承1
‑
8内,便于提高传动件1
‑
3的移动稳定性。
33.驱动器套壳1
‑
2内固定连接有导向杆1
‑
9,对应的,驱动器主体1
‑
1两侧成形有导向槽1
‑
10,导向槽1
‑
10与导向杆1
‑
9相适配,通过导向杆1
‑
9、导向槽1
‑
10相互配合,提高驱动器主体1
‑
1、传动件1
‑
3的移动稳定,提高传动精度。
34.驱动器套壳1
‑
2包括壳体1
‑
11和端盖1
‑
12,端盖1
‑
12可拆式安装在壳体1
‑
11上,端盖1
‑
12上成形有预紧通孔1
‑
13,预紧件1
‑
4通过螺纹可拆式安装在预紧通孔1
‑
13内,壳体1
‑
11侧壁上连接有导线连接部1
‑
14,通过导线连接部1
‑
14的设置,便于连接用于驱动驱动器主体1
‑
1的导线。
35.传动件1
‑
3包括端板1
‑
15和传动柱1
‑
16,端板1
‑
15与驱动器主体1
‑
1固定贴合,驱动器主体1
‑
1的另一侧端面与驱动器套壳1
‑
2底面固定连接,向驱动器主体1
‑
1施加电压,使得驱动器主体1
‑
1收缩,去掉电压,驱动器回复,传动柱1
‑
16与端板1
‑
15固定连接,传动柱1
‑
16上成型有侧孔1
‑
17和轴向孔1
‑
18,便于本驱动器与用于驱动机器人部件的牵引绳连接。
36.一种表情机器人,包括眼部机构2、嘴部机构3、颈部机构4和机器人壳体5,机器人壳体5套设在眼部机构2、嘴部机构3、颈部机构4的外侧,眼部机构2安装在嘴部机构3上,嘴部机构3安装在颈部机构4上,眼部机构2、嘴部机构3、颈部机构4内均安装有上述电活性聚合物驱动器1,为便于提高电活性聚合物驱动器的驱动行程,在本实施例还适配有传动放大器,传动放大器包括双倍放大器6和四倍放大器7。
37.双倍放大器6包括第一牵引绳6
‑
1、第二牵引绳6
‑
2、第一放大器轮6
‑
3和第二放大器轮6
‑
4,第一放大器轮6
‑
3与第二放大器轮6
‑
4固定连接,第一牵引绳6
‑
1的一端固定连接在第一放大器轮6
‑
3上,第二牵引绳6
‑
2的一端固定连接在第二放大器轮6
‑
4上,第一放大器轮6
‑
3的直径小于第二放大器轮6
‑
4,第二牵引绳5
‑
2与电活性聚合物驱动器1的传动件1
‑
3连接,用于对电活性聚合物驱动器1的行程放大。
38.四倍放大器7包括第三牵引绳7
‑
1、第四牵引绳7
‑
2、连接绳7
‑
3、第一大轮7
‑
4、第二大轮7
‑
5、第一小轮7
‑
6和第二小轮7
‑
7,第一小轮7
‑
6与第一大轮7
‑
4固定连接,同样的,第二小轮7
‑
7与第二大轮7
‑
4固定连接,连接绳7
‑
3的两端分别与第一大轮7
‑
4、第二小轮7
‑
7固定连接,第三牵引绳7
‑
1的一端固定连接在第一小轮7
‑
6上,第三牵引绳7
‑
1的另一端与电活性聚合物驱动器1的传动件1
‑
3连接,第四牵引绳7
‑
2的一端固定连接在第二大轮7
‑
5上,用于对电活性聚合物驱动器1的行程放大。
39.眼部机构2包括眼球组件2
‑
1、眉毛组件2
‑
2和眼部支架2
‑
3,眼球组件2
‑
1、眉毛组件2
‑
2分别安装在眼部支架2
‑
3上。
40.眼球组件2
‑
1包括眼球2
‑1‑
1、眼球支架2
‑1‑
2、眼球传动件2
‑1‑
3和四个电活性聚
合物驱动器1,眼球2
‑1‑
1转动安装在眼球支架2
‑1‑
2上,眼球支架2
‑1‑
2固定安装在眼部支架2
‑
3内,四个电活性聚合物驱动器1通过四倍放大器7分别与眼球2
‑1‑
1固定连接,驱动眼球在一定范围内摆动,在眼球传动件2
‑1‑
3内设有四个导向轮2
‑1‑
4,便于对四倍放大器7的第四牵引绳7
‑
2进行导向,提高眼球2
‑1‑
1的摆动精度。
41.眉毛组件2
‑
2包括眉毛2
‑2‑
1、眉毛支杆2
‑2‑
2、眉毛滑块2
‑2‑
3和眉毛连杆2
‑2‑
4,眉毛支杆2
‑2‑
2固定安装在眼部支架2
‑
3上,眉毛滑块2
‑2‑
3滑动安装在眉毛支杆2
‑2‑
2上,眉毛连杆2
‑2‑
4与眉毛滑块2
‑2‑
3固定连接,眉毛连杆2
‑2‑
4的一端与眉毛2
‑2‑
1固定连接,同一个眉毛2
‑2‑
1内连接有两个眉毛支杆2
‑2‑
2、眉毛滑块2
‑2‑
3、眉毛连杆2
‑2‑
4,在眉毛组件2
‑
2内设有两个电活性聚合物驱动器1,两个电活性聚合物驱动器1通过四倍放大器7的第四牵引绳7
‑
1与眉毛滑块2
‑2‑
3连接,眉毛滑块2
‑2‑
3与眉毛支杆2
‑2‑
2之间连接有复位弹簧2
‑2‑
5,便于眉毛滑块2
‑2‑
3复位。
42.眼部支架2
‑
3包括第一眼部板2
‑3‑
1、第二眼部板2
‑3‑
2和嘴唇驱动安装板3
‑
1,第一眼部板2
‑3‑
1、第二眼部板2
‑3‑
2、嘴唇驱动安装板3
‑
1分别平行设置,眼球组件2
‑
1安装在第二眼部板2
‑3‑
2上,眉毛组件2
‑
2安装在第一眼部板2
‑3‑
1上,嘴部机构3固定安装在嘴唇驱动安装板3
‑
1上。
43.嘴部机构3包括嘴唇驱动安装板3
‑
1、嘴唇连杆3
‑
2、上嘴唇驱动件3
‑
3、下嘴唇驱动件3
‑
4和嘴角驱动件3
‑
5,上嘴唇驱动件3
‑
3、下嘴唇驱动件3
‑
4分别固定安装在嘴唇驱动安装板3
‑
1的两侧端面上,上嘴唇驱动件3
‑
3、下嘴唇驱动件3
‑
4与嘴唇连杆3
‑
2连接,驱动嘴唇连杆3
‑
2的中部移动,嘴角驱动件3
‑
5与嘴唇连杆3
‑
2的嘴角连接,驱动嘴唇连杆3
‑
2的嘴角移动。
44.嘴唇连杆3
‑
2包括第一嘴唇杆3
‑2‑
1、第二嘴唇杆3
‑2‑
2、第三嘴唇杆3
‑2‑
3、第四嘴唇杆3
‑2‑
4、第五嘴唇杆3
‑2‑
5和第六嘴唇杆3
‑2‑
6,第一嘴唇杆3
‑2‑
1、第四嘴唇杆3
‑2‑
4平行设置,上嘴唇驱动件3
‑
3与第一嘴唇杆3
‑2‑
1连接,下嘴唇驱动件3
‑
4与第四嘴唇杆3
‑2‑
4连接,第二嘴唇杆3
‑2‑
2、第三嘴唇杆3
‑2‑
3形成嘴角,且第二嘴唇杆3
‑2‑
2、第三嘴唇杆3
‑2‑
3连接处与嘴角驱动件3
‑
5连接,同样的,第五嘴唇杆3
‑2‑
5、第六嘴唇杆3
‑2‑
6形成嘴角,且第五嘴唇杆3
‑2‑
5、第六嘴唇杆3
‑2‑
6与嘴角驱动件3
‑
5连接。
45.上嘴唇驱动件3
‑
3包括导向支架3
‑3‑
1、导向轮3
‑3‑
2和上嘴唇连接杆3
‑3‑
3,导向轮3
‑3‑
2通过支座固定安装在嘴唇驱动安装板3
‑
1上,导向支架3
‑3‑
1固定安装在嘴唇驱动安装板3
‑
1上,在导向支架3
‑3‑
1内成形有连接杆滑槽3
‑3‑
4,上嘴唇连接杆3
‑3‑
3滑动安装在连接杆滑槽3
‑3‑
4内,在导向支架3
‑3‑
1上安装有滚轮,电活性聚合物驱动器1通过牵引绳与上嘴唇连接杆3
‑3‑
3固定,牵引绳通过滚轮、导向轮3
‑3‑
2导向。
46.下嘴唇驱动件3
‑
4包括下嘴唇板3
‑4‑
1、驱动杆3
‑4‑
2、驱动连接座3
‑4‑
3和驱动连接杆3
‑4‑
4,下嘴唇板3
‑4‑
1转动安装在嘴唇驱动安装板3
‑
1上,电活性聚合物驱动器1通过驱动杆3
‑4‑
2与下嘴唇板3
‑4‑
1连接,驱动连接座3
‑4‑
3固定安装在下嘴唇板3
‑4‑
1上,驱动连接杆3
‑4‑
4固定连接在驱动连接座3
‑4‑
3上,且与第四嘴唇杆3
‑2‑
4连接。
47.嘴角驱动件3
‑
5包括嘴角底座3
‑5‑
1、转动辊3
‑5‑
2、摆动杆3
‑5‑
3和嘴角驱动杆3
‑5‑
4,转动辊3
‑5‑
2转动安装在嘴角底座3
‑5‑
1上,摆动杆3
‑5‑
3与转动辊3
‑5‑
2固定连接,嘴角驱动杆3
‑5‑
4与转动辊3
‑5‑
2偏心连接,电活性聚合物驱动器1与嘴角驱动杆3
‑5‑
4固定连接,摆动杆3
‑5‑
3与嘴角连接。
48.颈部机构4包括点头驱动件4
‑
1、转头驱动件4
‑
2和头部连接件4
‑
3,头部连接件4
‑
3安装在点头驱动件4
‑
1上,点头驱动件4
‑
1转动安装在转头驱动件4
‑
3上,点头驱动件4
‑
1内安装有转头防干扰装置4
‑
4,通过转头防干扰装置4
‑
4的设置,便于防止转头过程中对点头驱动件4
‑
1的影响,从而保证本机器人的工作稳定性。
49.点头驱动件4
‑
1包括点头板4
‑1‑
1、点头底板4
‑1‑
2和支撑柱4
‑1‑
3,点头板4
‑1‑
1通过铰链转动安装在点头底板4
‑1‑
2上,支撑柱4
‑1‑
3安装在点头底板4
‑1‑
2上,便于对点头板4
‑1‑
1进行支撑,在点头底板4
‑1‑
2上安装有两个双倍放大器,对应的,两个电活性聚合物驱动器1分别与两个双倍放大器连接,两个双倍放大器的第一牵引绳同时与点头板4
‑1‑
1固定连接,电活性聚合物驱动器1收缩,通过导向滚轮对牵引绳进行拉动,从而带动点头板4
‑1‑
1的一端发生位移,使得点头板4
‑1‑
1转动。
50.转头防干扰装置4
‑
4固定安装在点头板4
‑1‑
1的下端面上,电活性聚合物驱动器1上通过双倍放大器与转头防干扰装置4
‑
4滑动连接,转头防干扰装置4
‑
4包括转头导向块4
‑4‑
1、转头滑块4
‑4‑
2,在转头导向滑块4
‑4‑
1内挖设有转头导向槽4
‑4‑
3,转头滑块4
‑4‑
2滑动安装在转头导向槽4
‑4‑
3内,转头滑块4
‑4‑
2与双倍放大器的第一牵引绳固定连接。
51.转头驱动件4
‑
2包括转头支架4
‑2‑
1、转头传动件4
‑2‑
2、支撑架4
‑2‑
3和转轴4
‑2‑
4,转轴4
‑2‑
4转动安装在转头支架4
‑2‑
1上,转头传动件4
‑2‑
2与转轴4
‑2‑
4连接,支撑架4
‑2‑
3固定安装在转头支架4
‑2‑
1上,点头底板4
‑1‑
2通过轴承4
‑2‑
5转动安装在转头支架4
‑2‑
1上,转轴4
‑2‑
4与点头底板4
‑1‑
2固定连接,通过转头传动件4
‑2‑
2脖子转动。
52.转头传动件4
‑2‑
2包括齿条和齿轮,齿轮与转轴4
‑2‑
4固定连接,电活性聚合物驱动器1与齿条连接,通过驱动齿条来驱动齿轮转动,从而驱动转轴4
‑2‑
4转动。
53.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现;因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
54.尽管本文较多地使用了图中附图标记对应的术语,但并不排除使用其它术语的可能性;使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1