室外巡检机器人外壳组件的制作方法
1.本发明属于机器人制造技术领域,具体涉及一种室外巡检机器人外壳组件。
背景技术:
2.室外巡检机器人是靠机器人自身携带的电池提供电能,控制并驱动机器人工作。为了确保室外巡检机器人一次充电后,能工作较长时间,现有的室外巡检机器人的外壳大多比较薄,缺乏专门的防撞、防水设计,导致机器人防撞、防水能力较差,难以适用地形复杂、气候多变的工况点的巡检工作。
3.针对机器人的防撞问题,目前,本领域主要采用了以下两类技术方案:
4.第一类技术方案为智能防撞技术,通过机器人的激光信号装置或其他感应装置将巡检路线上可能与机器人发生碰撞的障碍物的信号发送给机器人的控制系统,由机器人的控制系统控制机器人减速、停止前进或绕行,从而避免发生碰撞。智能防撞技术通常能够避免机器人发生碰撞,但也存在一些技术缺陷:机器人的控制程序较为复杂,对主控芯片的性能有相当高的要求——目前主要使用进口芯片,致使机器人的制造成本和维护成本较高。
5.第一类技术方案为机械防撞技术,亦即给机器人安装类似于汽车保险杠之类防撞物件。例如,第201810109115.2号发明专利申请公开了一种轮式机器人防撞器,包括主梁组件(1)、撞击梁组件(2)、滑动缓冲组件(3)和侧面防撞组件(4),其特征在于:所述的主梁组件(1)包括主梁(1-1)、滑槽(1-2)、中间槽杆(1-3)、中间槽(1-5)、横杆滑槽(1-6)和挡棱(1-7),主梁(1-1)的后端中间位置固定连接有中间槽杆(1-3),中间槽杆(1-3)上设置有中间槽(1-5),中间槽(1-5)的前端贯穿主梁(1-1),中间槽(1-5)的后端贯穿中间槽杆(1-3),主梁(1-1)的上端设置有滑槽(1-2),主梁(1-1)后端的左右两端均设置有横杆滑槽(1-6),横杆滑槽(1-6)的上下外边缘位置均固定连接有挡棱(1-7);主梁(1-1)的左右两端均设置有滑动缓冲组件(3);所述的撞击梁组件(2)包括中间杆(2-1)、限位销(2-2)、缓冲弹簧i(2-3)、挡凸(2-4)、撞击梁(2-5)、中连柱(2-6)、圆形凸柱(2-7)和连接杆(2-8),中间杆(2-1)滑动连接在中间槽(1-5)上,中间杆(2-1)的后端固定连接有限位销(2-2),限位销(2-2)位于中间槽杆(1-3)的后方,中间杆(2-1)前端的左右两端均设置有挡凸(2-4),中间杆(2-1)上套接连接有缓冲弹簧i(2-3),缓冲弹簧i(2-3)位于主梁(1-1)与挡凸(2-4)之间,中间杆(2-1)的前端固定连接有撞击梁(2-5),中间杆(2-1)的前端的上端固定连接有中连柱(2-6),中连柱(2-6)的上端固定连接有连接杆(2-8),连接杆(2-8)的左右两端均固定连接有圆形凸柱(2-7);所述的侧面防撞组件(4)包括侧防撞梁(4-1)、竖杆(4-2)、横杆(4-3)、圆形凸柱滑槽(4-4)和槽杆(4-5),侧面防撞组件(4)设置有两个,侧防撞梁(4-1)的前端的下端固定连接有竖杆(4-2),竖杆(4-2)的下端固定连接有横杆(4-3),两个横杆(4-3)分别滑动连接在两个横杆滑槽(1-6)内,槽杆(4-5)上设置有圆形凸柱滑槽(4-4),槽杆(4-5)固定连接在侧防撞梁(4-1)的上端,槽杆(4-5)与侧防撞梁(4-1)之间呈三十度角,两个圆形凸柱(2-7)分别滑动连接在两个圆形凸柱滑槽(4-4)内。
6.第201810109115.2号发明专利申请能够较好地解决机器人的防撞问题,但是其缺
陷也是明显的,主要是防撞器结构复杂,重量较大,安装在机器人上之后,或者会使机器人运转不灵活,或者需要大幅度提高机器人的功率,从而消耗更多的能量。
7.针对机器人的防水问题,第201920614011.7号实用新型专利公开了一种防水式室外电力巡检机器人,包括车体,车体外侧设有由上壳体和下壳体连接而成的车体外壳,上壳体和下壳体的侧壁上分别设有进风口和出风口,进风口和出风口内侧均设有防水透气膜,靠近进风口一侧的车体内设有循环风扇;所述车体一端设有激光导航组件,激光导航组件上端延伸至上壳体外侧,激光导航组件和上壳体的连接处设有防水胶层,防水胶层顶部设有连接上壳体的密封盖。
8.第201920614011.7号实用新型专利能够较好地解决机器人的防水问题,但同时也存在较大的局限。例如,在昼夜温差大的工况点,该实用新型中的防水胶层极易老化,从而影响其防水效果。
9.除存在上述技术缺陷外,现有技术没有将机器人的防撞与防水问题作为一个总的发明构思予以考虑,从而导致最终形成的技术方案不可避免地存在局限性。
技术实现要素:
10.本发明的目的旨在解决现有的室外巡检机器人防撞、防水功能差的技术缺陷,该发明目的是通过下述技术方案实现的:
11.一种室外巡检机器人外壳组件,包括主壳体、底板和云台盖板,主壳体与底板相匹配,共同形成用于安装机器人本体的空间;在主壳体的内侧表面设有主壳体内部加强筋;在主壳体的顶部形成凸起部位,凸起部位的内部空间构成用于安装云台的云台安装孔,云台盖板位于该凸起部位的顶部,并盖合在云台上;云台安装孔的出口位置还设置有防水格栅,云台盖板与防水格栅紧密压合,从而将云台安装孔的出口密封。
12.本发明的基本技术构思是:(1)通过在主壳体的内侧表面设置主壳体内部加强筋,在减轻主壳体重量的同时,提高其强度,从而解决防撞问题;(2)通过云台盖板与防水格栅的配合,解决云台安装孔的出口这一易进水部位的密封问题,从而解决防水问题。
13.在上述技术方案的基础上,本发明可附加下述技术手段,以便更好地实现本发明的目的:
14.所述主壳体内部加强筋有多条,多条主壳体内部加强筋以纵横交错的连接方式设置在主壳体的内侧表面。
15.进一步地,还设有前防撞板,前防撞板位于主壳体的前端底部,且固定安装在底板上。在地形复杂的工况点,室外巡检机器人难免与工况点的障碍物或其他物件碰撞,有了前防撞板,主壳体不会与障碍物或其他物件直接碰撞,再加上主壳体内设有主壳体内部筋位,这就使得通常发生的碰撞,不会使主壳体受到损害。
16.进一步地,所述前防撞板用铝合金制作。
17.进一步地,所述前防撞板的尾端通过螺丝和螺帽与底板的前端紧固连接,前防撞板的前端凸出到主壳体的前端之外。
18.进一步地,在所述前防撞板的前端两侧设置碰撞传感器,碰撞传感器与室外巡检机器人的主控芯片通讯连接,在前防撞板的前端面还设置了由弹性材料制作的缓冲层,发生碰撞时,主控芯片根据碰撞传感器发送的碰撞信号,向室外巡检机器人的制动系统发出
指令,使室外巡检机器人停止前进。
19.进一步地,所述缓冲层是由纤维增强橡胶制成的、内部未充满空气的袋状体,其外部尺寸和形状与前防撞板3的前端相匹配,其内部由纤维增强橡胶分隔成前、中、后三个独立的、大小相同的封闭空间,每个封闭空间均单独设置充气口;所谓未充满空气,是指充气量占其内部空间的60﹪-80﹪。
20.进一步地,所述前防撞板由碳纤维制作,所述缓冲层的前端外壁喷涂了一层厚度为5-10μm的nicrbsi基耐磨涂层,所述纤维增强橡胶为醋脂纤维增强橡胶。
21.进一步地,在所述主壳体上的通讯接口处设置可密封该通讯接口的密封件,所述底板的左右两侧设有排水孔,排水孔的开口角度朝上。
22.进一步地,所述云台盖板内设有内部线缆,内部线缆一直保持在主壳体内部。
23.本发明的主要有益效果如下:
24.1、通过在主壳体的内侧表面设置主壳体内部加强筋,以及云台盖板与防水格栅的配合,本发明不仅解决了机器人的防撞、防水问题,而且结构简单,实用性强,易于实现。
25.2、通过在主壳体上的通讯接口处设置可密封该通讯接口的密封件,本发明解决了机器人通讯和密封同时兼顾的问题。
26.3、通过增设包括防撞板在内的防撞系统,避免主壳体和障碍物直接接触,本发明不仅提高了机器人的防撞能力,而且有效地减轻了被撞物所受到的损害。
27.4、通过在底板上设置排水孔,本发明进一步提高了机器人的防水能力,且排水孔兼有散热功能。
28.5、通过采用将内部线缆一直保持在主壳体内部的技术手段,本发明解决了线束露在机器人外引起的多种不安全问题。
附图说明
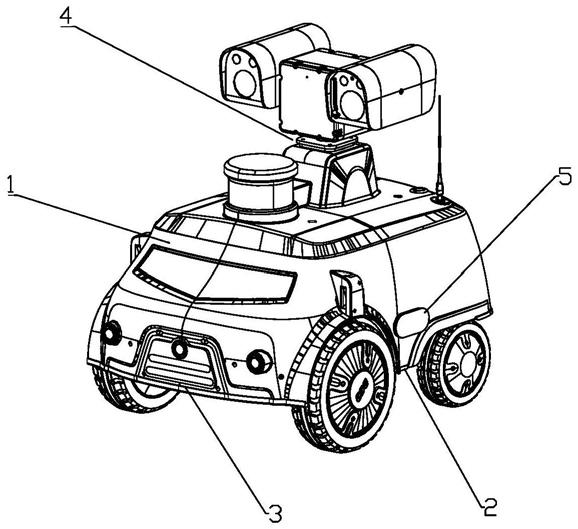
29.图1是本发明实施例1的整体结构示意图;
30.图2本发明实施例1的组装结构示意图;
31.图3是本发明实施例1中的云台盖板与主壳体防水的结构示意图;
32.图4是本发明实施例1中的主壳体内部结构示意图。
33.图5是本发明实施例2中的防撞系统的水平切面结构示意图
34.图中:
35.1——主壳体;2——底板;3——前防撞板;4——云台盖板;5——密封件;6——内部线缆;101——防水格栅;102——通讯接口;103——主壳体内部加强筋;104——云台安装孔;201——排水孔;301——碰撞传感器;302——螺孔;303——缓冲层。
具体实施方式
36.以下,结合附图介绍本发明的实施例。
37.实施例1
38.如图1并结合图2所示,一种室外巡检机器人外壳组件,包括主壳体1、底板2前防撞板3、云台盖板4和密封件5。
39.主壳体1与底板2相匹配,共同形成用于安装机器人本体的空间。
40.前防撞板3位于主壳体的前端底部,且固定安装在底板上。在本实施例中,前防撞板3用铝合金制作,前防撞板3的尾端通过螺丝和螺帽与底板2的前端紧固连接,前防撞板3的前端凸出到主壳体1的前端之外。前防撞板3的作用是,当室外巡检机器人与工况点的障碍物碰撞时,由前防撞板3直接承受撞击力,避免主壳体1直接与障碍物碰撞。
41.本实施例在主壳体1的顶部形成凸起部位,凸起部位的内部空间构成如图4所示的、用于安装云台的云台安装孔104,云台盖板4位于该凸起部位的顶部,并盖合在云台上;云台安装孔104的出口位置还设置有防水格栅101;如图3所示,云台盖板4与防水格栅101紧密压合,从而将云台安装孔104的出口密封。
42.如图4所示,在所述主壳体上设有通讯接口102,通讯接口102与图1所示的密封件相匹配,通过密封件5,可密封通讯接口102,从而解决了机器人通讯和密封同时兼顾的问题。在主壳体1的内侧表面还设置了纵横排列的多条主壳体内部加强筋103。一方面,主壳体内部加强筋103有利于加强主壳体1的强度,另一方面,由于设置了主壳体内部加强筋103,故可以将主壳体1的厚度设计得薄一些,从而可以在总体上减轻主壳体1的重量。
43.如图2所示,所述底板2上设有排水孔201,排水孔201的开口角度朝上,不仅能够排水,而且具有散热功能。在本实施例中,排水孔201有两个,分别设置在在底板2的左右两侧。设置排水孔的原因是,虽然本实施例对主壳体1与云台的接触部位以及通讯接口102作了防水设计,但因云台是活动的、且工况点气候条件的复杂,难以绝对确保外界的水不进入主壳体1内,当雨水进入主壳体1时,在重力的作用下,最终会通过排水孔201排出。
44.如图3所示,云台盖板4内设有内部线缆6,内部线缆6一直保持在主壳体内部。通过这种结构设计,本发明解决了线束暴露在机器人外引起的多种不安全问题,而且产品外观的美感更强。
45.在本实施例中,主壳体1(包括主壳体内部加强筋)可整体采用abs加工制作,也可以使用碳纤维等重量较轻、强度较大的材料制作。
46.实施例2
47.实施例2的基本结构与实施例1完全相同,所不同的是,实施例2的技术方案并非单独使用前防撞板提高室外巡检机器人的防撞性能,而是使用包括前防撞板、缓冲层和碰撞传感器的防撞系统来共同提高室外巡检机器人的防撞性能,同时还减轻被撞物可能受到的损害。
48.如图5所示,本实施例中的防撞系统包括前防撞板3,设置在前防撞板3前端两侧的碰撞传感器301,设置在前防撞板3前端的缓冲层303(缓冲层303可使用808等强力胶水与前防撞板3粘接)。在前防撞板3的尾端与机器人的底板2的连接部位设有螺孔302(实施例1也设有该结构)。
49.碰撞传感器301与室外巡检机器人的主控芯片通讯连接(优选无线连接方式)。
50.缓冲层303是由弹性材料(优选纤维增强橡胶)制成的、内部未充满空气的(充气量约占其内部空间的60﹪-80﹪)的袋状体,其外部尺寸和形状与前防撞板3的前端相匹配。
51.在本实施例中,缓冲层303内部由纤维增强橡胶分隔成前、中、后三个独立的、大小相同的封闭空间,每个封闭空间均单独设置充气口(图中未示出)。缓冲层303的总厚度(内部空间加前、后端外壁)为10cm,前、后外壁的厚度为1mm,用于分隔缓冲层303内部空间的纤维增强橡胶的厚度也为1mm。
52.纤维增强橡胶具有弹性好、耐高温、机械性能强的特点,在撞击的过程中不容易被撕裂(尤其是在缓冲层303的内部空间未充满气的情况下)。为了进一步提高缓冲层303的抗撕裂性能,本实施例用热喷涂的方法,在缓冲层303的前端外壁喷涂了一层厚度为5-10μm的nicrbsi基耐磨涂层。
53.本实施例所使用的纤维增强橡胶的基本配方及其制备方法可参考第200910031011.5号发明专利所公开的技术方案,所不同的是,本实施例中的纤维增强橡胶不是使用玻璃纤维、碳纤维或者聚丙烯纤维,而是使用醋脂纤维(其用量可参考200910031011.5号发明专利中玻璃纤维、碳纤维或者聚丙烯纤维的用量确定),其原因在于:使用醋脂纤维制作的纤维增强橡胶(醋脂纤维增强橡胶)具有更好的抗静电性,并且能够更好地与nicrbsi基耐磨涂层结合。
54.以上介绍了本实施例中的防撞系统的材料特征与结构特征,以下进一步介绍其工作原理:
55.当室外巡检机器人与障碍物发生碰撞时,一方面,由于缓冲层303的缓冲作用,直接作用于防撞板3的冲力大幅度减小,这意味着作用障碍物的冲力也相应减小;另一方面,虽然有缓冲层303的缓冲作用,但碰撞发生时仍然会产生震动,碰撞传感器301将碰撞产生的震动信号(与路面不平产生的震动信号不同)发送给机器人的主控芯片,主控芯片根据碰撞产生的震动信号向机器人的制动系统发出指令,使机器人停止前进,从而进一步减小因碰撞而产生的危害。
56.需要特别强调的是,室外巡检机器人在巡检过程中有时甚至会与粗心大意的行人碰撞,致使行人受到伤害。经模拟实验(以橡胶人体模型替代真人),在采用了本实施例的防撞系统后,即使室外巡检机器人与行人发生碰撞,根据橡胶人体模型的变形程度,可以大概率地推定其不会给行人造成损害。另外,有了缓冲层303之后,前防撞板3可以使用质量更轻的碳纤维板替代,从而有利于减轻机器人的重量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1