智能洗消机器人的制作方法
1.本发明涉及机器人技术领域,具体为智能洗消机器人。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
3.智能洗消机器人是指可以实现智能且自主的清洗、消毒和灭火等功能的机器人,在特种救援行动中,可以代替消防及其他工作,对救援场地进行灭火和清洗消毒,现存的洗消机器人,通常采用自主行驶到指定位置的形式,对指定区域进行喷射,但现存的机器人喷射范围不够大,在添加消毒剂进行消毒时,需要提前混合水和试剂,导致喷射时,提前混合的水溶液沉淀物过多,使溶液混合不均匀,同时,只通过物理作用,将水溶液喷出,很多时候达不到试剂的最佳溶解点,造成水溶液融合不彻底,消毒效果不佳,因此亟需设计智能洗消机器人来解决上述问题。
技术实现要素:
4.本发明的目的在于提供智能洗消机器人,以解决上述背景技术中提出的现存的洗消机器人喷射范围不够大,水溶液混合不均匀、不彻底,造成消毒效果不佳的问题。
5.为实现上述目的,本发明提供如下技术方案:智能洗消机器人,包括车体、行驶车轴和行驶履带,所述行驶车轴位于车体的内壁转动连接,所述行驶车轴的表面与行驶履带的内壁转动连接,所述车体的上表面固定连接有承托块,所述承托块的上表面固定连接有连通块,所述连通块的表面固定连接有稳定块,所述稳定块的内壁转动连接有转动杆,所述转动杆的表面固定连接有伸缩杆,所述伸缩杆远离转动杆的一端固定连接有上水管,所述上水管的外侧设置有升温装置,所述升温装置包括加热块,所述加热块的表面固定连接有加热管,所述加热管远离加热块的一端固定连接有加热杆,所述加热杆远离加热管的一端固定连接有加热线圈,所述加热线圈的外侧设置有螺旋管,所述上水管远离伸缩杆的一端固定连接有接通块,所述螺旋管的上侧设置有喷射装置,所述喷射装置包括中心喷头,所述中心喷头的表面固定连接有外圈喷块,所述外圈喷块的表面开设有喷射孔,所述外圈喷块的表面固定连接有喷头外壳,所述喷头外壳的表面固定连接有线路块,所述线路块的内壁转动连接有转动块,所述转动块的表面固定连接有开合块。
6.优选的,所述加热块的表面固定连接有连接块,所述承托块呈“l”字形设置,所述加热线圈呈线性阵列设置,所述接通块远离上水管的一侧与螺旋管固定连接,所述喷射孔呈圆周阵列设置,所述开合块与外圈喷块的表面相抵。
7.优选的,所述车体的上方设置有进水装置,所述进水装置包括储水箱和支撑壳,所述支撑壳的外表面固定有支撑板,所述支撑板背离支撑壳的一端固定有水泵和减速机,所述水泵的内壁转动连接有抽水转子,抽水转子为双轴抽水转子,双轴抽水转子的一端固定
连接有涡轮叶,且抽水转子的另一端通过联轴器与减速机的输入端连接固定,所述水泵的进水口固定有引水组件,所述引水组件包括通水管,所述储水箱的内部设置有丝管,所述通水管的内壁转动连接有定位水管,所述丝管的下方设置有通孔。
8.优选的,所述减速机的输出端通过联轴器连接有驱动组件,所述驱动组件包括输出轴,所述输出轴的表面转动连接有主动皮带轮,所述主动皮带轮的表面转动连接有传动皮带,所述传动皮带的内壁转动连接有被动皮带轮,所述储水箱的内部设置有下压组件,所述下压组件包括下压板,所述下压板与储水箱的内壁滑动连接,所述下压板的内壁固定连接有螺纹套,所述下压板的内壁活动连接有橡胶圈。
9.优选的,所述承托块的上方设置有滴剂装置,所述滴剂装置包括滴落管,所述滴落管的上表面固定连接有盛装盒,所述滴落管的内壁转动连接有调节阀,所述盛装盒靠近调节阀的一侧固定连接有显示屏,所述滴落管的下表面固定连接有搅拌块,所述搅拌块的内部设置有搅拌叶,所述搅拌块与通水管固定连接,所述搅拌块远离通水管的一侧与连通块固定连接。
10.优选的,所述搅拌块的内壁转动连接有搅拌转子,且转子的表面转动连接有搅拌电机,所述搅拌电机的下表面与承托块的上表面固定连接。
11.优选的,所述搅拌块的下表面固定连接有防漏环,所述防漏环与搅拌转子的表面转动连接。
12.优选的,所述盛装盒的内壁转动连接有防护盖子,所述防护盖子的下表面与盛装盒的内壁相抵。
13.优选的,所述上水管的外侧设置有管道外壳,所述管道外壳的上表面与喷头外壳的下表面固定连接,所述管道外壳的表面与连接块固定连接。
14.与现有技术相比,本发明的有益效果是:该智能洗消机器人便于洗消机器人的喷头增大喷射面积,使喷射水雾呈一道“墙体”,均匀并彻底的混合水溶液,提高消毒效果。
15.(1)通过设置升温装置和喷射装置,智能洗消机器人在进行喷射作业时,可以通过升温装置对螺旋管内部的水溶液进行升温,之后喷射出来后,形成水雾状,增大了喷射面积,也使喷射更加节约水资源,同时,喷射装置可以通过线路块导电,促使转动块带动开合块进行开合,选择是否大面积喷射和进行水雾状“墙体”喷射,使喷射面积增大,且形成垂直方向的高压高效的喷射效果。
16.(2)通过设置进水装置和滴剂装置,智能洗消机器人在进行喷射作业时,可以在机器人的车体内部设置储水箱,通过携带储水箱的方式,避免拖拉进水带或只能喷射少部分水的情况,需要水源时,通过水泵抽水向上,在升温装置打开一段时间后,再打开进水装置和滴剂装置,通过将水和试剂充分混合、搅拌和反应,再通过螺旋管的高温反应,使喷射出来的消毒和灭火效果更好。
附图说明
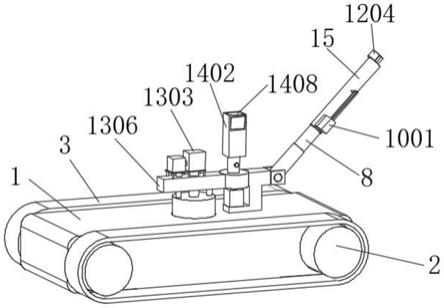
17.图1为本发明的正视结构示意图;
18.图2为本发明图1中水泵的结构示意图;
19.图3为本发明图1中盛装盒的结构示意图;
20.图4为本发明图2中储水箱的剖视结构示意图;
21.图5为本发明图1中加热块的结构示意图;
22.图6为本发明图1中伸缩杆的结构示意图;
23.图7为本发明图1中喷头外壳的结构示意图;
24.图8为本发明图4中的a处结构示意图;
25.图9为本发明图4中的b处结构示意图。
26.图中:1、车体;2、行驶车轴;3、行驶履带;4、承托块;5、连通块;6、稳定块;7、转动杆;8、伸缩杆;9、上水管;10、升温装置;1001、加热块;1002、加热管;1003、加热杆;1004、加热线圈;1005、连接块;1006、螺旋管;11、接通块;12、喷射装置;1201、中心喷头;1202、外圈喷块;1203、喷射孔;1204、喷头外壳;1205、线路块;1206、转动块;1207、开合块;13、进水装置;1301、储水箱;1302、引水组件;13021、通水管;13022、丝管;13023、定位水管;13024、通孔;1303、水泵;1304、支撑壳;1305、支撑板;1306、驱动组件;13061、输出轴;13062、主动皮带轮;13063、传动皮带;13064、被动皮带轮;1307、减速机;1308、下压组件;13081、下压板;13082、螺纹套;13083、橡胶圈;14、滴剂装置;1401、滴落管;1402、盛装盒;1403、调节阀;1404、显示屏;1405、搅拌块;1406、搅拌电机;1407、防漏环;1408、防护盖子;15、管道外壳。
具体实施方式
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
28.请参阅图1
‑
9,本发明提供的一种实施例:智能洗消机器人,包括车体1、行驶车轴2和行驶履带3,行驶车轴2位于车体1的内壁转动连接,行驶车轴2的表面与行驶履带3的内壁转动连接,行驶车轴2通过车体1内部的行驶马达带动,上述皆为现有技术,在此不做过多阐述。
29.车体1的上表面固定连接有承托块4,承托块4的上表面固定连接有连通块5,连通块5的表面固定连接有稳定块6,稳定块6的内壁转动连接有转动杆7,转动杆7的表面固定连接有伸缩杆8,伸缩杆8远离转动杆7的一端固定连接有上水管9,上水管9的外侧设置有升温装置10,升温装置10包括加热块1001,加热块1001的表面固定连接有加热管1002,加热块1001的内部流通有加热电流,电加热的加热原理是应用了电流的热效应,电流通过电源接头和引出棒导入电热体,由电热体产生的热量将加热管1002加热,加热管1002远离加热块1001的一端固定连接有加热杆1003,加热杆1003远离加热管1002的一端固定连接有加热线圈1004,加热线圈1004的外侧设置有螺旋管1006,加热线圈1004围绕螺旋管1006,传导热量至螺旋管1006内外,使其升温,上水管9远离伸缩杆8的一端固定连接有接通块11,螺旋管1006的上侧设置有喷射装置12,喷射装置12包括中心喷头1201,中心喷头1201的表面固定连接有外圈喷块1202,外圈喷块1202的表面开设有喷射孔1203,外圈喷块1202的表面固定连接有喷头外壳1204,喷头外壳1204的表面固定连接有线路块1205,线路块1205的内壁转动连接有转动块1206,转动块1206的表面固定连接有开合块1207,线路块1205内部设置有导线,导线传导电信号,利用线路块1205内部的小型电机和齿轮,将转动块1206和开合块1207带动起来,进行转动。
30.进一步的,如图5所示,加热块1001的表面固定连接有连接块1005,承托块4呈“l”字形设置,加热线圈1004呈线性阵列设置,接通块11远离上水管9的一侧与螺旋管1006固定连接,喷射孔1203呈圆周阵列设置,开合块1207与外圈喷块1202的表面相抵,连接块1005固定加热块1001的位置,接通块11连通水溶液至螺旋管1006内部,开合块1207转动内外,起到是否形成垂直水雾状“墙体”的作用。
31.进一步的,如图2所示,车体1的上方设置有进水装置13,进水装置13包括储水箱1301和支撑壳1304,支撑壳1304的外表面固定有支撑板1305,支撑板1305背离支撑壳1304的一端固定有水泵1303和减速机1307,水泵1303的内壁转动连接有抽水转子,抽水转子为双轴抽水转子,双轴抽水转子的一端固定连接有涡轮叶,且抽水转子的另一端通过联轴器与减速机1307的输入端连接固定,水泵1303的进水口固定有引水组件1302,引水组件1302包括通水管13021,储水箱1301的内部设置有丝管13022,通水管13021的内壁转动连接有定位水管13023,丝管13022的下方设置有通孔13024,水泵1303利用电力启动后,抽水向上的同时,带动减速机1307外的联轴器转动,起到两者联动效果。
32.进一步的,如图8所示,减速机1307的输出端通过联轴器连接有驱动组件1306,驱动组件1306包括输出轴13061,输出轴13061的表面转动连接有主动皮带轮13062,主动皮带轮13062的表面转动连接有传动皮带13063,传动皮带13063的内壁转动连接有被动皮带轮13064,储水箱1301的内部设置有下压组件1308,下压组件1308包括下压板13081,下压板13081与储水箱1301的内壁滑动连接,下压板13081的内壁固定连接有螺纹套13082,下压板13081的内壁活动连接有橡胶圈13083,减速机1307带动的输出轴13061带动主动皮带轮13062、传动皮带13063和被动皮带轮13064转动,使丝管13022带动下压板13081向下,压缩储水箱1301内部空间,增大水压,橡胶圈13083防水外露。
33.进一步的,如图2所示,支撑板1305的上表面固定连接有减速机1307,减速机1307的外部设置有联轴器,减速机1307的内壁转动连接有丝管13022,丝管13022的表面啮合连接有螺纹套13082,螺纹套13082的表面固定连接有下压板13081,下压板13081与储水箱1301的内壁滑动连接,下压板13081的表面固定连接有橡胶圈13083,利用水泵1303的转动带动丝管13022的转动,再带动螺纹套13082带着下压板13081向下施压,加大水的压力,橡胶圈13083起到密封防漏水的作用。
34.进一步的,如图3所示,承托块4的上方设置有滴剂装置14,滴剂装置14包括滴落管1401,滴落管1401的上表面固定连接有盛装盒1402,滴落管1401的内壁转动连接有调节阀1403,盛装盒1402靠近调节阀1403的一侧固定连接有显示屏1404,滴落管1401的下表面固定连接有搅拌块1405,搅拌块1405的内部设置有搅拌叶,搅拌块1405与通水管13021固定连接,搅拌块1405远离通水管13021的一侧与连通块5固定连接,搅拌块1405内部的搅拌叶,使经过的水和滴落的试剂通过搅拌融合充分。
35.进一步的,如图3所示,搅拌块1405的内壁转动连接有搅拌转子,且转子的表面转动连接有搅拌电机1406,搅拌电机1406的下表面与承托块4的上表面固定连接,搅拌电机1406带动搅拌转子,可以实现自动的搅拌作用,同时承托块4固定了搅拌电机1406的位置,防止其晃动。
36.进一步的,如图3所示,搅拌块1405的下表面固定连接有防漏环1407,防漏环1407与搅拌转子的表面转动连接,防漏环1407起到防止水漏向下的作用,避免水从搅拌块1405
内滴落向下至搅拌电机1406,造成短路。
37.进一步的,如图1所示,盛装盒1402的内壁转动连接有防护盖子1408,防护盖子1408的下表面与盛装盒1402的内壁相抵,防护盖子1408可以方便打开后添加试剂,关闭后,保护试剂不被污染。
38.进一步的,如图1所示,上水管9的外侧设置有管道外壳15,管道外壳15的上表面与喷头外壳1204的下表面固定连接,管道外壳15的表面与连接块1005固定连接,管道外壳15保护上水管9和螺旋管1006不易受损。
39.工作原理:智能洗消机器人在进行喷射作业时,为避免螺旋管1006内部前期不能形成水雾,应首先打开加热块1001,通过加热块1001内部的电磁加热作用,将热能传导至加热管1002和加热杆1003,最后传至加热线圈1004,通过加热线圈1004围绕螺旋管1006外部,传导螺旋管1006内外,由于螺旋管1006采用铜材料制作,传导性能好且不易软化,并在铜的内壁先喷上喷漆,避免铜与水溶液的化学反应,在提高螺旋管1006内外温度后,通过进水装置13和滴剂装置14流通水溶液至螺旋管1006,水溶液通过粗的上水管9,再到细的螺旋管1006,形成物理压力,最后通过中心喷头1201和外圈喷块1202内的喷射孔1203喷出,形成水雾状大面积喷射方式,有效的起到大面积的消毒和特种灭火作用,也可通过线路块1205内的导线传递信号及电力,将开合块1207转动向内,堵住部分喷射孔1203,形成垂直方向的水雾状喷射“墙体”,实现高压高效较大的喷射效果。
40.智能洗消机器人在进行喷射作业时,打开进水装置13和滴剂装置14后,引水组件1302会将水源从通水管13021下的储水箱1301内抽向上,在需要加压时,通过水泵1303带动减速机1307外的联轴器,使丝管13022转动,带动螺纹套13082和下压板13081向下,对水施压,形成较大水压力,迫使喷射装置12内的喷射孔1203喷出更集中的柱状水雾,将水源流入通水管13021,再流入搅拌块1405,通过调节阀1403控制滴落下的试剂速率和流量,以显示屏1404上显示的流量大小和速率为准,试剂和水融合后,搅拌电机1406启动,带动搅拌转子和搅拌叶转动,将试剂和水充分融合,再通往上水管9和螺旋管1006,由于螺旋管1006升温加热,温度较高时,试剂的化学反应更活跃、更充分的可以与水融合,即可解决了水溶液溶合不彻底的问题。
41.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1