一种机械手固定设备及其使用方法与流程
1.本发明属于机械手技术领域,具体涉及一种机械手固定设备及使用方法。
背景技术:
2.近年来,物流行业发展迅速,为了提高包裹、信件等物品的分拣效率,通常会采用分拣机来实现物品的分拣操作。为了提高物品上包效率,并降低人力成本,相关技术采用了机械手进行上包操作,即:利用机械手将物品移送至分拣机。
3.公开号为cn110694917a的发明公开了一种机械手及分拣装置,涉及分拣设备技术领域,为解决现有机械手在分拣过程中易出现气管与其他部件缠绕的问题而设计。该机械手包括底座、第一驱动机构、吸盘机构、气泵和与气泵连接的气管,第一驱动机构安装于底座,包括第一驱动件和转动件,第一驱动件与转动件传动连接,第一驱动件被配置为驱动转动件自转;转动件具有第一空腔;吸盘机构与转动件连接并具有取货位置和卸货位置,转动件自转时能够带动吸盘机构运动至取货位置或卸货位置;至少部分气管穿过第一空腔与吸盘机构的吸盘连接。该分拣装置包括上述机械手。该发明提供的机械手及分拣装置防止了吸盘机构在取货位置与卸货位置之间运动的过程中,气管与其他部件产生缠绕的情形。
4.公开号为cn110694919a的发明公开了一种机械手及快件分拣设备,涉及分拣设备技术领域,为解决相关技术提供的机械手在分拣过程中易与快件发生干涉的问题而设计。该机械手包括机架、第一驱动机构、第二驱动机构及用于取放物品的抓手,其中,第一驱动机构安装于机架,且第一驱动机构被配置为驱动抓手绕第一水平轴线公转;第二驱动机构被配置为驱动抓手绕第二水平轴线自转;第二水平轴线与第一水平轴线呈夹角设置。该快件分拣设备包括上述机械手。该发明提供的机械手及快件分拣设备有效地避免了因机械手与分拣台上的快件发生干涉而导致快件错位,甚至导致机械手上包失败的情形。
5.然而,以上现有技术中的传统的机械手只具有单一平面的抓取分拣功能,在抓取过程中无法调整被抓取物的抓取角度,抓取物品时被抓取物容易松脱,影响抓取效果。
技术实现要素:
6.针对现有技术中存在的上述不足之处,本发明提供了一种机械手固定设备,用以解决现有机械手在抓取过程中无法调整被抓取物的抓取角度,抓取物品时被抓取物容易松脱,抓取效果不好的问题。
7.为了解决上述技术问题,本发明采用了如下技术方案:
8.一种机械手固定设备,包括支撑部、移动部、折叠部、抓取部、吸附归位部和固定部,所述移动部与支撑部滑动连接,所述折叠部安装在移动部的顶部,所述抓取部置于折叠部的顶部,所述吸附归位部置于抓取部的底部,所述固定部置于抓取部的底部四周;所述支撑部包括支撑组件,所述移动部包括移动组件,所述支撑组件两侧设有两个轨道,所述移动组件通过两个轨道与支撑组件滑动连接;所述折叠部包括支撑底座、转动底座、推动组件、第一折叠组件、第二折叠组件、第三折叠组件、第四折叠组件和第五折叠组件,所述支撑底
座、转动底座、推动组件、第一折叠组件、第二折叠组件、第三折叠组件、第四折叠组件和第五折叠组件依次转动连接;所述抓取部包括抓取组件,所述吸附归位部包括吸附归位组件,所述固定部包括多个固定组件,所述抓取组件安装在第五折叠组件的底部与第五折叠组件转动连接,所述吸附归位组件安装在抓取组件中部,所述固定组件安装在抓取组件底部四周。
9.进一步地,所述固定组件包括固定安装板、抓手滑动槽、滑动抓手、滑动接触片、电阻圈、伸缩连接线、磁感线圈、磁吸件、固定缓冲件;所述固定安装板安装在抓取组件底部四周,所述抓手滑动槽上设有滑动抓手,所述滑动抓手与抓手滑动槽滑动连接,滑动抓手上设有滑动接触片,所述固定安装板底部设有电阻圈,所述滑动接触片与电阻圈滑动连接,所述电阻圈底部设有伸缩连接线,所述伸缩连接线底部安装在滑动抓手上,所述伸缩连接线与磁感线圈的一端电连接,所述滑动抓手内部设有独立电源,所述独立电源的两端分别与滑动接触片、磁感线圈相连,所述磁感线圈内侧设有磁吸件,所述磁吸件通过固定缓冲件与滑动抓手底部连接。
10.进一步地,所述固定组件还包括多个拉力弹簧、锁定装置、锁定伸缩杆、锁定卡扣、锁定卡槽;所述拉力弹簧分别位于滑动抓手顶部、伸缩连接线外侧,所述抓手滑动槽外侧设有锁定装置、所述锁定装置上设有锁定伸缩杆,所述锁定伸缩杆上设有锁定卡扣,所述滑动抓手上设有锁定卡槽,所述锁定卡扣与锁定卡槽能够相互啮合。
11.进一步地,所述吸附归位组件包括多个吸附头、多个万向连接件、多个吸附伸缩杆、多个吸附固定杆、吸附转动组件、缓冲杆、吸取腔、吸取口、调节环和动力装置;所述吸附头与万向连接件的底部相连,所述万向连接件安装在吸附伸缩杆的底部,所述吸附伸缩杆与吸附固定杆滑动连接,所述吸附固定杆安装在吸附转动组件底部,所述吸附转动组件通过转动调节吸附固定杆的位置,所述吸附转动组件顶部设有调节环,所述调节环底部设有多个四角均布的缓冲杆,多个所述缓冲杆外部均设有弹簧,所述调节环内侧设有吸取口,所述吸取口上方设有吸取腔,所述吸取口使得吸取腔与外部贯通,所述调节环通过转动调节吸取口的张口大小,所述吸取腔顶部与动力装置底部连接。
12.进一步地,所述动力装置内部包括吸附驱动块、吸附转轴、吸附转子、吸附扇叶和吸附扇环,所述吸附驱动块安装在吸取腔内壁,所述吸附转轴一端与吸附驱动块内转动连接,所述吸附转轴另一端设有吸附转子,所述吸附转子外壁设有多个环形均布的吸附扇叶,所述吸附扇环置于吸附扇叶的另一端,多个所述吸附扇叶分别与吸附转子和吸附扇环转动连接,实现吸附扇叶换向,进行吹力和吸力的转换。
13.进一步地,所述抓取组件包括抓取连接端、多个第一升降气缸、多个第一伸缩杆、抓取连接板、第二升降气缸、多个抓取支撑杆、第二伸缩杆、多个抓合板、抓合驱动块、抓合底板、多个探测头和多个驱动杆;所述抓取连接端与第五折叠组件底板转动连接,多个所述第一升降气缸和第二升降气缸底部均固定在抓取连接端底部,多个所述第一升降气缸对称置于第二升降气缸两侧,多个所述第一伸缩杆一端分别与多个第一升降气缸滑动连接,多个所述第一伸缩杆另一端分别与抓取连接板固定连接,所述第二伸缩杆一端与第二升降气缸底部滑动连接,所述第二伸缩杆另一端与抓合驱动块顶部连接,多个所述抓取支撑杆呈四角分部置于抓取连接板底部,多个所述抓取支撑杆一端固定连接在抓取连接板的底部,多个所述抓取支撑杆另一端分别与抓合底板连接,多个所述抓合板分别通过多个驱动杆滑
动连接,多个所述固定组件分别与多个抓合板底部固定连接,多个所述探测头呈四角分布置于抓合底板的底部。
14.进一步地,所述支撑底座底部固定在移动组件的顶部,所述支撑底座顶部与转动底座底部转动连接,所述推动组件一端与转动底座铰接,所述推动组件另一端与第一折叠组件中部铰接,所述第一折叠组件与转动底座顶部铰接,所述第二折叠组件与第一折叠组件铰接,所述第三折叠组件与第二折叠组件铰接,所述第四折叠组件与第三折叠组件铰接,所述第五折叠组件与第四折叠组件转动连接,所述支撑底座包括支撑底座固定端和第一转动连接端,所述支撑底座固定端为不规则壳体结构,所述第一转动连接端置于支撑底座固定端顶部,所述转动底座包括第二转动连接端、第三转动连接端和第一转动电机、第二转动电机和第一推动铰座,所述第二转动连接端置于转动底座底部,所述第二转动连接端与第一转动连接端通过第一转动电机驱动转动连接,所述第三转动连接端和第一推动铰座对称置于转动底座顶部,所述推动组件包括推动座、两个推动缸、两个推动杆和推动连接块,两个所述推动缸置于推动座顶部,所述推动座与第一推动铰座通过第二转动电机驱动铰接,多个所述推动杆一端分别与两个推动杆滑动连接,所述推动连接块与两个推动杆连接,所述第一折叠组件包括第二推动铰座、第一铰接端、第一折叠臂和第二铰接端,所述第一铰接端与第二铰接端对称置于第一折叠臂两端,所述第一铰接端与第三转动连接端转动连接,所述第二推动铰座与推动连接块铰接,所述第二折叠组件包括第四转动连接端、第三转动电机、传动块和第五转动连接端,所述第四转动连接端通过第三转动电机与第二铰接端驱动转动连接,所述传动块置于第四转动连接端顶部,所述第五转动连接端置于传动块的一端,所述第三折叠组件包括第六转动连接端、转动臂和第七转动连接端,所述转动臂为圆柱体结构,所述第六转动连接端与第七转动连接端对称置于转动臂两端,所述第六转动连接端与第五转动连接端转动连接,所述第四折叠组件包括第八转动连接端和第三铰接端,所述第五折叠组件包括第四铰接端和第九转动连接端,所述第八转动连接端与第七转动连接端转动连接,所述第三铰接端与第四铰接端铰接,所述第九转动连接端与抓取连接端转动连接。
15.进一步地,所述支撑组件还包括支撑架、两个支撑滑盖、多个支撑耳、多个支撑连接柱和多个支脚,所述支撑架为多个方杆围合搭接而成的框架结构,两个所述支撑滑盖对称置于支撑架顶部,多个所述支撑耳对称分布置于支撑架的两端,多个所述支脚通过多个支撑连接柱与多个支撑耳螺纹连接。
16.进一步地,所述移动组件包括移动电机、传动杆、驱动轮和移动架,所述移动架与两个轨道滑动连接,所述移动电机安装在移动架顶部,所述移动电机出端连接有传动杆,所述驱动轮置于传动杆底部,所述驱动轮与轨道滑动连接。
17.本发明还公开了该机械手分拣设备的使用方法:
18.s1.移动:移动电机通过传动杆传递动力驱动驱动轮转动,带动移动架在支撑组件上做往复运动,实现该分拣设备的多工位工作;
19.s2.靠近:第一转动电机驱动第二转动连接端在第一转动连接端上转动,实现该第一转动连接端的转向操作,转动至最佳抓取位置后,通过控制推动组件、第一折叠组件、第二折叠组件、第三折叠组件、第四折叠组件和第五折叠组件相互折叠或者抬升操作,将抓取部移动至被抓取位置的正上方,多个探测头对物体进行识别;
20.s3.开爪:控制抓取连接端转动至合适抓取的角度,控制第一升降气缸和第二升降气缸分别推动第一伸缩杆和第二伸缩杆下放抓合驱动块,控制多个驱动杆伸出,进而带动抓合板张开,安装在抓合板底部的固定组件随之打开;
21.s4.:吸附归位:通过吸附固定杆与吸附伸缩杆的相互配合,将吸附头向下延伸,通过万向连接件让吸附头与被抓取物体表面贴合,在动力装置的作用下被抓取物体吸起,调整被抓取物体位置,吸附转动组件能够让,将吸附头旋转,反复调整被抓取物体的相对位置,直至调整到最适合被抓取的位置;
22.s5.抓取:通过控制推动组件、第一折叠组件、第二折叠组件、第三折叠组件、第四折叠组件和第五折叠组件相互铰接动作,下放抓取组件直至固定组件下端抵靠在物体平台的顶部,控制抓合驱动块收回,控制抓合板带动固定组件收紧,抓取物体;
23.s6.固定:固定组件收紧后,滑动抓手在物品重力的影响下,滑动抓手与抓手滑动槽相对滑动,从而改变滑动接触片与电阻圈之间的位置,电阻圈的电阻变小,使得磁感线圈中流通的电流增大,磁吸件的磁力增大,从而利用磁力对被抓取物体进行固定;
24.s7.下放:移动电机通过传动杆传递动力驱动驱动轮转动,带动移动架在支撑组件上移动,移动至物品放置位置后松开抓取组件下放物品,完成分拣操作。
25.本发明与现有技术相比,具有如下有益效果:
26.1.本发明包括支撑部、移动部、折叠部、抓取部、吸附归位部和固定部,支撑部为该分拣设备提供稳定的工作环境,移动部与支撑部滑动连接,通过移动部的往复运动,实现该分拣设备的多工位分拣操作,折叠部通过支撑底座、转动底座、推动组件、第一折叠组件、第二折叠组件、第三折叠组件、第四折叠组件和第五折叠组件依次转动连接,完成该分拣设备下爪、抬升运输和摆放的操作,抓取部通过抓取组件对物品进行识别和抓取,吸附归位部通过将物品反复吸起调整,将物品调整到最适合被抓取的位置,固定部通过滑动抓手在重力的影响下,与抓手滑动槽相对滑动,从而改变滑动接触片与电阻圈之间的位置,电阻圈的电阻变小,使得磁感线圈中流通的电流增大,磁吸件的磁力增大,从而利用磁力对被抓取物体进行固定;
27.2.拉力弹簧能够对滑动抓手产生拉力,让滑动抓手放开物品后转动归位,为下一次抓取做准备,锁定装置可以控制锁定卡扣与锁定卡槽啮合,在抓取之后对滑动抓手进行固定,防止机械手在移动过程中受到其他外力的影响导致磁吸件磁力的改变,吸附归位组件安装在抓取组件中部,缓冲杆保证在进行吸附归位的过程中,减少因机械震动而引起的机械损伤和工作效率低下,吸取口通过调节环可进行调节吸取口的大小,以此来改变吸取力度的大小,提高了该设备的使用可控性和精确性;
28.3.支撑底座和转动底座转动连接,实现该折叠部进行全方位转动,实现多个工位快速分拣作业,推动组件推动和拉回安装在转动底座上的第一折叠组件,完成折叠部的一级折叠抬升功能,第二折叠组件与第一折叠组件转动连接,实现该折叠部二级折叠抬升功能,第三折叠组件与第二折叠组件转动连接,实现该折叠部一级转动功能,第四折叠组件与第三这得折叠组件转动连接,实现该折叠部二级转动功能,四五折叠组件与第四折叠组件转动连接,实现该折叠部的摆向功能。支撑部为该分拣设备提供稳定的工作环境,移动部与支撑部滑动连接,通过移动部的往复运动,实现该分拣设备的多工位分拣操作,扩大了分拣工作的范围,减少了人工搬用的人力投入和安全风险,提高了该分拣设备的快速分拣能力。
附图说明
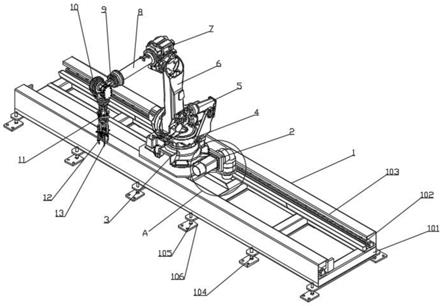
29.图1为本发明一种机械手固定设备实施例的立体结构示意图;
30.图2为图1中a部位的局部放大图;
31.图3为本发明一种机械手固定设备实施例中折叠部的结构示意图(视角一);
32.图4为本发明一种机械手固定设备实施例中折叠部的结构示意图(视角二);
33.图5为本发明一种机械手固定设备实施例中抓取部的结构示意图;
34.图6为图5中b处的局部放大图;
35.图7为本发明一种机械手固定设备实施例中固定部的立体剖视图;
36.图8为本发明一种机械手固定设备实施例中吸附归位部的部分剖视结构示意图;
37.图9为本发明一种机械手固定设备实施例中吸附归位部的部分结构示意图。
38.说明书附图中的附图标记包括:
39.支撑组件1;支撑架101;支撑滑盖103;支撑耳104;支撑连接柱105;支脚106;
40.移动组件2;移动电机201;传动杆202;驱动轮203;移动架204;
41.支撑底座3;支撑底座固定端301;第一转动连接端302;
42.转动底座4;第二转动连接端401;第三转动连接端402;第一转动电机403;第二转动电机404;第一推动铰座405;
43.推动组件5;推动座501;推动缸502;推动杆503;推动连接块504;
44.第一折叠组件6;第二推动铰座601;第一铰接端602;第一折叠臂603;第二铰接端604;
45.第二折叠组件7;第四转动连接端701;第三转动电机702;传动块703;第五转动连接端704;
46.第三折叠组件8;第六转动连接端801;转动臂802;第七转动连接端803;
47.第四折叠组件9;第八转动连接端901;第三铰接端902;
48.第五折叠组件10;第四铰接端1001;第九转动连接端1002;
49.抓取组件11;抓取连接端1101;第一升降气缸1102;第一伸缩杆1103;第二升降气缸 1104;抓取支撑杆1105;第二伸缩杆1106;抓合板1107;抓合驱动块1108;抓合底板1109;探测头1110;抓取连接板1112;驱动杆1113;
50.吸附归位组件12;吸附头1201;万向连接件1202;多个吸附伸缩杆1203;吸附固定杆 1204;吸附转动组件1205;缓冲杆1206;吸取腔1207;吸取口1208;调节环1209;吸附驱动块1210;吸附转轴1211;吸附转子1212;吸附扇叶1213;吸附扇环1214;动力装置1215;
51.固定组件13;固定安装板1301;抓手滑动槽1302;滑动抓手1303;滑动接触片1304;电阻圈1305;伸缩连接线1306;磁感线圈1307;磁吸件1308;固定缓冲件1309;拉力弹簧 1310;锁定装置1311;锁定伸缩杆1312;锁定卡扣1313;锁定卡槽1314。
具体实施方式
52.为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
53.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不
1307的一端电连接,滑动抓手1303内部设有独立电源,独立电源的两端分别与滑动接触片 1304、磁感线圈1307相连,磁感线圈1307内侧设有磁吸件1308,磁吸件1308通过固定缓冲件1309与滑动抓手1303底部连接;
60.具体来说,固定安装板1301给固定组件13提供安装位置,滑动抓手1303与抓手滑动槽1302滑动连接,滑动抓手1303能够在抓手滑动槽1302中上下滑动,当滑动抓手1303抓取物品之后,滑动抓手1303在物品重力的影响下,相对与抓手滑动槽1302向下滑动,从而改变滑动接触片1304与电阻圈1305的接触位置,滑动接触片1304向下移动的距离越大,电阻圈1305的电阻就越小,磁感线圈1307中流通的电流就越大,磁吸件1308的磁力增大,利用磁力对被抓取物体进行固定,并且根据不同的物体能够采用不同的磁力。
61.固定组件13还包括多个拉力弹簧1310、锁定装置1311、锁定伸缩杆1312、锁定卡扣 1313、锁定卡槽1314;拉力弹簧1310分别位于滑动抓手1303顶部、伸缩连接线1306外侧,抓手滑动槽1302外侧设有锁定装置1311、锁定装置1311上设有锁定伸缩杆1312,锁定伸缩杆1312上设有锁定卡扣1313,滑动抓手1303上设有锁定卡槽1314,锁定卡扣1313与锁定卡槽1314能够相互啮合;
62.具体来说,拉力弹簧1310能够对滑动抓手1303产生拉力,让滑动抓手1303放开物品后转动归位,为下一次抓取做准备,锁定装置1311可以控制锁定卡扣1313与锁定卡槽1314 啮合,在抓取之后对滑动抓手1303进行固定,防止机械手在移动过程中受到其他外力的影响导致磁吸件磁力的改变。
63.吸附归位组件12包括多个吸附头1201、多个万向连接件1202、多个吸附伸缩杆1203、多个吸附固定杆1204、吸附转动组件1205、缓冲杆1206、吸取腔1207、吸取口1208、调节环1209和动力装置1215;吸附头1201与万向连接件1202的底部相连,万向连接件1202 安装在吸附伸缩杆1203的底部,吸附伸缩杆1203与吸附固定杆1204滑动连接,吸附固定杆1204安装在吸附转动组件1205底部,吸附转动组件1205通过转动调节吸附固定杆1204 的位置,吸附转动组件1205顶部设有调节环1209,调节环1209底部设有多个四角均布的缓冲杆1206,多个缓冲杆1206外部均设有弹簧,调节环1209内侧设有吸取口1208,吸取口 1208上方设有吸取腔1207,吸取口1208使得吸取腔1207与外部贯通,调节环1209通过转动调节吸取口1208的张口大小,吸取腔1207顶部与动力装置1215底部连接;
64.具体来说,吸附归位组件12安装在抓取组件11中部,吸附头1201安装在万向连接件 1202上,万向连接件1202可以让吸附头1201只有转动,使得吸附头1201在于物体表面接触时能够与物体表面紧密贴合,缓冲杆1206保证在进行吸附归位的过程中,减少因机械震动而引起的机械损伤和工作效率低下,吸取口1208通过调节环1209可进行调节吸取口1208 的大小,以此来改变吸取力度的大小,提高了该设备的使用可控性和精确性。
65.动力装置1215内部包括吸附驱动块1210、吸附转轴1211、吸附转子1212、吸附扇叶 1213和吸附扇环1214,吸附驱动块1210安装在吸取腔1207内壁,吸附转轴1211一端与吸附驱动块1210内转动连接,吸附转轴1211另一端设有吸附转子1212,吸附转子1212外壁设有多个环形均布的吸附扇叶1213,吸附扇环1214置于吸附扇叶1213的另一端,多个吸附扇叶1213分别与吸附转子1212和吸附扇环1214转动连接,实现吸附扇叶1213换向,进行吹力和吸力的转换;
66.具体来说,吸附组件12通过吸附驱动块1210提供动力输出,驱动吸附转轴1211转
动,安装在吸附转轴1211上的吸附转子1212随之转动,通过吸附扇叶1213提供风力,吸附扇环1214对吸附扇叶1213提供一定的物理保护,保证吸附扇叶1213转动的稳定性和持续性,吸附扇叶1213与吸附转子1212转动连接,可根据实际需要,改变风力的方向,进行吸附和吹扫之间的清洁模式转换,提高了该分拣设备的多功能性和可持续性。
67.实施例二:
68.如图1
‑
8所示,一种机械手固定设备,包括支撑部、移动部、折叠部、抓取部、吸附归位部和固定部,移动部与支撑部滑动连接,折叠部安装在移动部的顶部,抓取部置于折叠部的顶部,吸附归位部置于抓取部的底部,固定部置于抓取部的底部四周;支撑部包括支撑组件1,移动部包括移动组件2,支撑组件1两侧设有两个轨道102,移动组件2通过两个轨道 102与支撑组件1滑动连接;折叠部包括支撑底座3、转动底座4、推动组件5、第一折叠组件6、第二折叠组件7、第三折叠组件8、第四折叠组件9和第五折叠组件10,支撑底座3、转动底座4、推动组件5、第一折叠组件6、第二折叠组件7、第三折叠组件8、第四折叠组件9和第五折叠组件10依次转动连接;抓取部包括抓取组件11,吸附归位部包括吸附归位组件12,固定部包括多个固定组件13,抓取组件11安装在第五折叠组件10的底部与第五折叠组件10转动连接,吸附归位组件12安装在抓取组件11中部,固定组件13安装在抓取组件11底部四周;
69.具体来说,本发明包括支撑部、移动部、折叠部、抓取部和吸渣部,支撑部为该分拣设备提供稳定的工作环境,移动部与支撑部滑动连接,通过移动部的往复运动,实现该分拣设备的多工位分拣操作,折叠部通过支撑底座3、转动底座4、推动组件5、第一折叠组件6、第二折叠组件7、第三折叠组件8、第四折叠组件9和第五折叠组件10依次转动连接,完成该分拣设备下爪、抬升运输和摆放的操作,抓取部通过抓取组件11对物品进行识别和抓取,吸附归位部12通过将物品反复吸起调整,将物品调整到最适合被抓取的位置,固定部13通过滑动抓手1303在物品重力的影响下,与抓手滑动槽1302相对滑动,从而改变滑动接触片 1304与电阻圈1305之间的位置,电阻圈1305的电阻变小,使得磁感线圈1307中流通的电流增大,磁吸件1308的磁力增大,从而利用磁力对被抓取物体进行固定;
70.固定组件13包括固定安装板1301、抓手滑动槽1302、滑动抓手1303、滑动接触片1304、电阻圈1305、伸缩连接线1306、磁感线圈1307、磁吸件1308、固定缓冲件1309;固定安装板1301安装在抓取组件11底部四周,抓手滑动槽1302上设有滑动抓手1303,滑动抓手1303 与抓手滑动槽1302滑动连接,滑动抓手1303上设有滑动接触片1304,固定安装板1301底部设有电阻圈1305,滑动接触片1304与电阻圈1305滑动连接,电阻圈1305底部设有伸缩连接线1306,伸缩连接线1306底部安装在滑动抓手1303上,伸缩连接线1306与磁感线圈 1307的一端电连接,滑动抓手1303内部设有独立电源,独立电源的两端分别与滑动接触片 1304、磁感线圈1307相连,磁感线圈1307内侧设有磁吸件1308,磁吸件1308通过固定缓冲件1309与滑动抓手1303底部连接;
71.具体来说,固定安装板1301给固定组件13提供安装位置,滑动抓手1303与抓手滑动槽1302滑动连接,滑动抓手1303能够在抓手滑动槽1302中上下滑动,当滑动抓手1303抓取物品之后,滑动抓手1303在物品重力的影响下,相对与抓手滑动槽1302向下滑动,从而改变滑动接触片1304与电阻圈1305的接触位置,滑动接触片1304向下移动的距离越大,电阻圈1305的电阻就越小,磁感线圈1307中流通的电流就越大,磁吸件1308的磁力增大,利用磁力对被抓取物体进行固定,并且根据不同的物体能够采用不同的磁力。
72.固定组件13还包括多个拉力弹簧1310、锁定装置1311、锁定伸缩杆1312、锁定卡扣 1313、锁定卡槽1314;拉力弹簧1310分别位于滑动抓手1303顶部、伸缩连接线1306外侧,抓手滑动槽1302外侧设有锁定装置1311、锁定装置1311上设有锁定伸缩杆1312,锁定伸缩杆1312上设有锁定卡扣1313,滑动抓手1303上设有锁定卡槽1314,锁定卡扣1313与锁定卡槽1314能够相互啮合;
73.具体来说,拉力弹簧1310能够对滑动抓手1303产生拉力,让滑动抓手1303放开物品后转动归位,为下一次抓取做准备,锁定装置1311可以控制锁定卡扣1313与锁定卡槽1314 啮合,在抓取之后对滑动抓手1303进行固定,防止机械手在移动过程中受到其他外力的影响导致磁吸件磁力的改变。
74.吸附归位组件12包括多个吸附头1201、多个万向连接件1202、多个吸附伸缩杆1203、多个吸附固定杆1204、吸附转动组件1205、缓冲杆1206、吸取腔1207、吸取口1208、调节环1209和动力装置1215;吸附头1201与万向连接件1202的底部相连,万向连接件1202 安装在吸附伸缩杆1203的底部,吸附伸缩杆1203与吸附固定杆1204滑动连接,吸附固定杆1204安装在吸附转动组件1205底部,吸附转动组件1205通过转动调节吸附固定杆1204 的位置,吸附转动组件1205顶部设有调节环1209,调节环1209底部设有多个四角均布的缓冲杆1206,多个缓冲杆1206外部均设有弹簧,调节环1209内侧设有吸取口1208,吸取口 1208上方设有吸取腔1207,吸取口1208使得吸取腔1207与外部贯通,调节环1209通过转动调节吸取口1208的张口大小,吸取腔1207顶部与动力装置1215底部连接;
75.具体来说,吸附归位组件12安装在抓取组件11中部,吸附头1201安装在万向连接件 1202上,万向连接件1202可以让吸附头1201只有转动,使得吸附头1201在于物体表面接触时能够与物体表面紧密贴合,缓冲杆1206保证在进行吸附归位的过程中,减少因机械震动而引起的机械损伤和工作效率低下,吸取口1208通过调节环1209可进行调节吸取口1208 的大小,以此来改变吸取力度的大小,提高了该设备的使用可控性和精确性。
76.动力装置1215内部包括吸附驱动块1210、吸附转轴1211、吸附转子1212、吸附扇叶 1213和吸附扇环1214,吸附驱动块1210安装在吸取腔1207内壁,吸附转轴1211一端与吸附驱动块1210内转动连接,吸附转轴1211另一端设有吸附转子1212,吸附转子1212外壁设有多个环形均布的吸附扇叶1213,吸附扇环1214置于吸附扇叶1213的另一端,多个吸附扇叶1213分别与吸附转子1212和吸附扇环1214转动连接,实现吸附扇叶1213换向,进行吹力和吸力的转换;
77.具体来说,吸附组件12通过吸附驱动块1210提供动力输出,驱动吸附转轴1211转动,安装在吸附转轴1211上的吸附转子1212随之转动,通过吸附扇叶1213提供风力,吸附扇环1214对吸附扇叶1213提供一定的物理保护,保证吸附扇叶1213转动的稳定性和持续性,吸附扇叶1213与吸附转子1212转动连接,可根据实际需要,改变风力的方向,进行吸附和吹扫之间的清洁模式转换,提高了该分拣设备的多功能性和可持续性。
78.抓取组件11包括抓取连接端1101、多个第一升降气缸1102、多个第一伸缩杆1103、抓取连接板1112、第二升降气缸1104、多个抓取支撑杆1105、第二伸缩杆1106、多个抓合板 1107、抓合驱动块1108、抓合底板1109、多个探测头1110和多个驱动杆1113;抓取连接端 1101与第五折叠组件10底板转动连接,多个第一升降气缸1102和第二升降气缸1104底部均固定在抓取连接端1101底部,多个第一升降气缸1102对称置于第二升降气缸1104两侧,多
个第一伸缩杆1103一端分别与多个第一升降气缸1102滑动连接,多个第一伸缩杆1103 另一端分别与抓取连接板1112固定连接,第二伸缩杆1106一端与第二升降气缸1104底部滑动连接,第二伸缩杆1106另一端与抓合驱动块1108顶部连接,多个抓取支撑杆1105呈四角分部置于抓取连接板1112底部,多个抓取支撑杆1105一端固定连接在抓取连接板1112 的底部,多个抓取支撑杆1105另一端分别与抓合底板1109连接,多个抓合板1107分别通过多个驱动杆1113滑动连接,多个固定组件13分别与多个抓合板1107底部固定连接,多个探测头1110呈四角分布置于抓合底板1109的底部;
79.具体来说,抓取连接端1101与第五折叠组件10底板转动连接,多个第一升降气缸1102 和第二升降气缸1104底部均固定在抓取连接端1101底部,多个第一升降气缸1102对称置于第二升降气缸1104两侧,多个第一伸缩杆1103一端分别与多个第一升降气缸1102滑动连接,多个第一伸缩杆1103另一端分别与抓取连接板1112固定连接,第二伸缩杆1106一端与第二升降气缸1104底部滑动连接,第二伸缩杆1106另一端与抓合驱动块1108顶部连接,多个抓取支撑杆1105呈四角分部置于抓取连接板1112底部,多个抓取支撑杆1105一端固定连接在抓取连接板1112的底部,多个抓取支撑杆1105另一端分别与抓合底板1109 连接,第一升降气缸1102和第二升降气缸1104通过推动第一伸缩杆1103和第二伸缩杆1106 进行该抓取组件11抓取高度的控制,在进行物品抓取时,同过多个探测头1110对物体进行位置确定,驱动抓合驱动块1108伸出或者收缩1113,控制抓合板1107相对于抓合驱动块 1108的靠拢或远离,以此来驱动固定组件13对物品的抓取和放置,提高了该抓取组件11 的分拣智能化和多工能性,提高了该抓取组件11的使用稳定性和便捷性。
80.支撑底座3底部固定在移动组件2的顶部,支撑底座3顶部与转动底座4底部转动连接,推动组件5一端与转动底座4铰接,推动组件5另一端与第一折叠组件6中部铰接,第一折叠组件6与转动底座4顶部铰接,第二折叠组件7与第一折叠组件6铰接,第三折叠组件8 与第二折叠组件7铰接,第四折叠组件9与第三折叠组件8铰接,第五折叠组件10与第四折叠组件9转动连接。
81.支撑底座3包括支撑底座固定端301和第一转动连接端302,支撑底座固定端301为不规则壳体结构,第一转动连接端302置于支撑底座固定端301顶部;
82.转动底座4包括第二转动连接端401、第三转动连接端402和第一转动电机403、第二转动电机404和第一推动铰座405,第二转动连接端401置于转动底座4底部,第二转动连接端401与第一转动连接端302通过第一转动电机403驱动转动连接,第三转动连接端402 和第一推动铰座405对称置于转动底座4顶部;
83.推动组件5包括推动座501、两个推动缸502、两个推动杆503和推动连接块504,两个推动缸502置于推动座501顶部,推动座501与第一推动铰座405通过第二转动电机404驱动铰接,多个推动杆503一端分别与两个推动杆503滑动连接,推动连接块504与两个推动杆503连接;
84.第一折叠组件6包括第二推动铰座601、第一铰接端602、第一折叠臂603和第二铰接端604,第一铰接端602与第二铰接端604对称置于第一折叠臂603两端,第一铰接端602 与第三转动连接端402转动连接,第二推动铰座601与推动连接块504铰接;
85.第二折叠组件7包括第四转动连接端701、第三转动电机702、传动块703和第五转动连接端704,第四转动连接端701通过第三转动电机702与第二铰接端604驱动转动连接,
传动块703置于第四转动连接端701顶部,第五转动连接端704置于传动块703的一端;
86.第三折叠组件8包括第六转动连接端801、转动臂802和第七转动连接端803,转动臂 802为圆柱体结构,第六转动连接端801与第七转动连接端803对称置于转动臂802两端,第六转动连接端801与第五转动连接端704转动连接;
87.第四折叠组件9包括第八转动连接端901和第三铰接端902,第五折叠组件10包括第四铰接端1001和第九转动连接端1002,第八转动连接端901与第七转动连接端803转动连接,第三铰接端902与第四铰接端1001铰接,第九转动连接端1002与抓取连接端1101转动连接。
88.折叠部通过支撑底座3、转动底座4、推动组件5、第一折叠组件6、第二折叠组件7、第三折叠组件8、第四折叠组件9和第五折叠组件10依次转动连接,完成该分拣设备下爪、抬升运输和摆放的操作,支撑底座3和转动底座4转动连接,实现该折叠部进行全方位转动,实现多个工位快速分拣作业,推动组件5推动和拉回安装在转动底座4上的第一折叠组件6,完成折叠部的一级折叠抬升功能,第二折叠组件7与第一折叠组件6转动连接,实现该折叠部二级折叠抬升功能,第三折叠组件8与第二折叠组件7转动连接,实现该折叠部一级转动功能,第四折叠组件9与第三这得折叠组件8转动连接,实现该折叠部二级转动功能,四五折叠组件10与第四折叠组件9转动连接,实现该折叠部的摆向功能。
89.支撑组件1还包括支撑架101、两个支撑滑盖103、多个支撑耳104、多个支撑连接柱 105和多个支脚106,支撑架101为多个方杆围合搭接而成的框架结构,两个支撑滑盖103 对称置于支撑架101顶部,多个支撑耳104对称分布置于支撑架101的两端,多个支脚106 通过多个支撑连接柱105与多个支撑耳104螺纹连接。
90.移动组件2包括移动电机201、传动杆202、驱动轮203和移动架204,移动架204与两个轨道102滑动连接,移动电机201安装在移动架204顶部,移动电机201出端连接有传动杆202,驱动轮203置于传动杆202底部,驱动轮203与轨道102滑动连接。
91.支撑部为该分拣设备提供稳定的工作环境,移动部与支撑部滑动连接,通过移动部的往复运动,实现该分拣设备的多工位分拣操作,扩大了分拣工作的范围,减少了人工搬用的人力投入和安全风险,提高了该分拣设备的快速分拣能力。
92.本发明还公开了该机械手分拣设备的使用方法:
93.s1.移动:移动电机201通过传动杆202传递动力驱动驱动轮203转动,带动移动架204 在支撑组件1上做往复运动,实现该分拣设备的多工位工作;
94.s2.靠近:第一转动电机403驱动第二转动连接端401在第一转动连接端302上转动,实现该第一转动连接端302的转向操作,转动至最佳抓取位置后,通过控制推动组件5、第一折叠组件6、第二折叠组件7、第三折叠组件8、第四折叠组件9和第五折叠组件10相互折叠或者抬升操作,将抓取部移动至被抓取位置的正上方,多个探测头1110对物体进行识别;
95.s3.开爪:控制抓取连接端1101转动至合适抓取的角度,控制第一升降气缸1102和第二升降气缸1104分别推动第一伸缩杆1103和第二伸缩杆1106下放抓合驱动块1108,控制多个驱动杆1113伸出,进而带动抓合板1107张开,安装在抓合板1107底部的固定组件13随之打开;
96.s4.:吸附归位:通过吸附固定杆1204与吸附伸缩杆1203的相互配合,将吸附头1201 向下延伸,通过万向连接件1202让吸附头1201与被抓取物体表面贴合,在动力装置
1215 的作用下被抓取物体吸起,调整被抓取物体位置,吸附转动组件1205能够让,将吸附头1201 旋转,反复调整被抓取物体的相对位置,直至调整到最适合被抓取的位置;
97.s5.抓取:通过控制推动组件5、第一折叠组件6、第二折叠组件7、第三折叠组件8、第四折叠组件9和第五折叠组件10相互铰接动作,下放抓取组件11直至固定组件13下端抵靠在物体平台的顶部,控制抓合驱动块1108收回,控制抓合板1107带动固定组件13收紧,抓取物体;
98.s6.固定:固定组件13收紧后,滑动抓手1303在物品重力的影响下,滑动抓手1303与抓手滑动槽1302相对滑动,从而改变滑动接触片1304与电阻圈1305之间的位置,电阻圈 1305的电阻变小,使得磁感线圈1307中流通的电流增大,磁吸件1308的磁力增大,从而利用磁力对被抓取物体进行固定;
99.s7.下放:移动电机201通过传动杆202传递动力驱动驱动轮203转动,带动移动架204 在支撑组件1上移动,移动至物品放置位置后松开抓取组件11下放物品,完成分拣操作。
100.实施例二相对于实施例一来说,实施例二中抓取组件11包括抓取连接端1101、多个第一升降气缸1102、多个第一伸缩杆1103、抓取连接板1112、第二升降气缸1104、多个抓取支撑杆1105、第二伸缩杆1106、多个抓合板1107、抓合驱动块1108、抓合底板1109、多个探测头1110和多个驱动杆1113;抓取连接端1101与第五折叠组件10底板转动连接,多个第一升降气缸1102和第二升降气缸1104底部均固定在抓取连接端1101底部,多个第一升降气缸1102对称置于第二升降气缸1104两侧,多个第一伸缩杆1103一端分别与多个第一升降气缸1102滑动连接,多个第一伸缩杆1103另一端分别与抓取连接板1112固定连接,第二伸缩杆1106一端与第二升降气缸1104底部滑动连接,第二伸缩杆1106另一端与抓合驱动块1108顶部连接,多个抓取支撑杆1105呈四角分部置于抓取连接板1112底部,多个抓取支撑杆1105一端固定连接在抓取连接板1112的底部,多个抓取支撑杆1105另一端分别与抓合底板1109连接,多个抓合板1107分别通过多个驱动杆1113滑动连接,多个固定组件13分别与多个抓合板1107底部固定连接,多个探测头1110呈四角分布置于抓合底板 1109的底部;
101.具体来说,抓取连接端1101与第五折叠组件10底板转动连接,多个第一升降气缸1102 和第二升降气缸1104底部均固定在抓取连接端1101底部,多个第一升降气缸1102对称置于第二升降气缸1104两侧,多个第一伸缩杆1103一端分别与多个第一升降气缸1102滑动连接,多个第一伸缩杆1103另一端分别与抓取连接板1112固定连接,第二伸缩杆1106一端与第二升降气缸1104底部滑动连接,第二伸缩杆1106另一端与抓合驱动块1108顶部连接,多个抓取支撑杆1105呈四角分部置于抓取连接板1112底部,多个抓取支撑杆1105一端固定连接在抓取连接板1112的底部,多个抓取支撑杆1105另一端分别与抓合底板1109 连接,第一升降气缸1102和第二升降气缸1104通过推动第一伸缩杆1103和第二伸缩杆1106 进行该抓取组件11抓取高度的控制,在进行物品抓取时,同过多个探测头1110对物体进行位置确定,驱动抓合驱动块1108伸出或者收缩1113,控制抓合板1107相对于抓合驱动块 1108的靠拢或远离,以此来驱动固定组件13对物品的抓取和放置,提高了该抓取组件11 的分拣智能化和多工能性,提高了该抓取组件11的使用稳定性和便捷性。
102.支撑底座3底部固定在移动组件2的顶部,支撑底座3顶部与转动底座4底部转动连接,推动组件5一端与转动底座4铰接,推动组件5另一端与第一折叠组件6中部铰接,第一折
叠组件6与转动底座4顶部铰接,第二折叠组件7与第一折叠组件6铰接,第三折叠组件8 与第二折叠组件7铰接,第四折叠组件9与第三折叠组件8铰接,第五折叠组件10与第四折叠组件9转动连接。
103.支撑底座3包括支撑底座固定端301和第一转动连接端302,支撑底座固定端301为不规则壳体结构,第一转动连接端302置于支撑底座固定端301顶部;
104.转动底座4包括第二转动连接端401、第三转动连接端402和第一转动电机403、第二转动电机404和第一推动铰座405,第二转动连接端401置于转动底座4底部,第二转动连接端401与第一转动连接端302通过第一转动电机403驱动转动连接,第三转动连接端402 和第一推动铰座405对称置于转动底座4顶部;
105.推动组件5包括推动座501、两个推动缸502、两个推动杆503和推动连接块504,两个推动缸502置于推动座501顶部,推动座501与第一推动铰座405通过第二转动电机404驱动铰接,多个推动杆503一端分别与两个推动杆503滑动连接,推动连接块504与两个推动杆503连接;
106.第一折叠组件6包括第二推动铰座601、第一铰接端602、第一折叠臂603和第二铰接端604,第一铰接端602与第二铰接端604对称置于第一折叠臂603两端,第一铰接端602 与第三转动连接端402转动连接,第二推动铰座601与推动连接块504铰接;
107.第二折叠组件7包括第四转动连接端701、第三转动电机702、传动块703和第五转动连接端704,第四转动连接端701通过第三转动电机702与第二铰接端604驱动转动连接,传动块703置于第四转动连接端701顶部,第五转动连接端704置于传动块703的一端;
108.第三折叠组件8包括第六转动连接端801、转动臂802和第七转动连接端803,转动臂 802为圆柱体结构,第六转动连接端801与第七转动连接端803对称置于转动臂802两端,第六转动连接端801与第五转动连接端704转动连接;
109.第四折叠组件9包括第八转动连接端901和第三铰接端902,第五折叠组件10包括第四铰接端1001和第九转动连接端1002,第八转动连接端901与第七转动连接端803转动连接,第三铰接端902与第四铰接端1001铰接,第九转动连接端1002与抓取连接端1101转动连接。
110.折叠部通过支撑底座3、转动底座4、推动组件5、第一折叠组件6、第二折叠组件7、第三折叠组件8、第四折叠组件9和第五折叠组件10依次转动连接,完成该分拣设备下爪、抬升运输和摆放的操作,支撑底座3和转动底座4转动连接,实现该折叠部进行全方位转动,实现多个工位快速分拣作业,推动组件5推动和拉回安装在转动底座4上的第一折叠组件6,完成折叠部的一级折叠抬升功能,第二折叠组件7与第一折叠组件6转动连接,实现该折叠部二级折叠抬升功能,第三折叠组件8与第二折叠组件7转动连接,实现该折叠部一级转动功能,第四折叠组件9与第三这得折叠组件8转动连接,实现该折叠部二级转动功能,四五折叠组件10与第四折叠组件9转动连接,实现该折叠部的摆向功能。
111.支撑组件1还包括支撑架101、两个支撑滑盖103、多个支撑耳104、多个支撑连接柱 105和多个支脚106,支撑架101为多个方杆围合搭接而成的框架结构,两个支撑滑盖103 对称置于支撑架101顶部,多个支撑耳104对称分布置于支撑架101的两端,多个支脚106 通过多个支撑连接柱105与多个支撑耳104螺纹连接。
112.移动组件2包括移动电机201、传动杆202、驱动轮203和移动架204,移动架204与两
个轨道102滑动连接,移动电机201安装在移动架204顶部,移动电机201出端连接有传动杆202,驱动轮203置于传动杆202底部,驱动轮203与轨道102滑动连接。
113.支撑部为该分拣设备提供稳定的工作环境,移动部与支撑部滑动连接,通过移动部的往复运动,实现该分拣设备的多工位分拣操作,扩大了分拣工作的范围,减少了人工搬用的人力投入和安全风险,提高了该分拣设备的快速分拣能力。
114.本发明还公开了该机械手分拣设备的使用方法:
115.s1.移动:移动电机201通过传动杆202传递动力驱动驱动轮203转动,带动移动架204 在支撑组件1上做往复运动,实现该分拣设备的多工位工作;
116.s2.靠近:第一转动电机403驱动第二转动连接端401在第一转动连接端302上转动,实现该第一转动连接端302的转向操作,转动至最佳抓取位置后,通过控制推动组件5、第一折叠组件6、第二折叠组件7、第三折叠组件8、第四折叠组件9和第五折叠组件10相互折叠或者抬升操作,将抓取部移动至被抓取位置的正上方,多个探测头1110对物体进行识别;
117.s3.开爪:控制抓取连接端1101转动至合适抓取的角度,控制第一升降气缸1102和第二升降气缸1104分别推动第一伸缩杆1103和第二伸缩杆1106下放抓合驱动块1108,控制多个驱动杆1113伸出,进而带动抓合板1107张开,安装在抓合板1107底部的固定组件13随之打开;
118.s4.:吸附归位:通过吸附固定杆1204与吸附伸缩杆1203的相互配合,将吸附头1201 向下延伸,通过万向连接件1202让吸附头1201与被抓取物体表面贴合,在动力装置1215 的作用下被抓取物体吸起,调整被抓取物体位置,吸附转动组件1205能够让,将吸附头1201 旋转,反复调整被抓取物体的相对位置,直至调整到最适合被抓取的位置;
119.s5.抓取:通过控制推动组件5、第一折叠组件6、第二折叠组件7、第三折叠组件8、第四折叠组件9和第五折叠组件10相互铰接动作,下放抓取组件11直至固定组件13下端抵靠在物体平台的顶部,控制抓合驱动块1108收回,控制抓合板1107带动固定组件13收紧,抓取物体;
120.s6.固定:固定组件13收紧后,滑动抓手1303在物品重力的影响下,滑动抓手1303与抓手滑动槽1302相对滑动,从而改变滑动接触片1304与电阻圈1305之间的位置,电阻圈 1305的电阻变小,使得磁感线圈1307中流通的电流增大,磁吸件1308的磁力增大,从而利用磁力对被抓取物体进行固定;
121.s7.下放:移动电机201通过传动杆202传递动力驱动驱动轮203转动,带动移动架204 在支撑组件1上移动,移动至物品放置位置后松开抓取组件11下放物品,完成分拣操作。
122.以上的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1