一种多机器人数据交互系统和多机器人控制方法
1.本技术涉及自动控制技术领域,尤其涉及一种多机器人数据交互系统和多机器人控制方法。
背景技术:
2.箱梁结构件和桁架结构件是通常通过焊接而成,其加工制造是工作量最大的环节。目前,大部分依然采用人工进行制造。人工制造不可避免的面临着效率低下、质量无法保证、工期不可预测、工人劳动强度大、作业环境恶劣等问题。随着人力成本的上升,企业在经营中面临着严峻的挑战。
技术实现要素:
3.为解决上述技术问题,本说明书实施例是这样实现的:
4.本说明书实施例提供的一种多机器人数据交互系统,所述系统包括:
5.总控服务器、交换机、第一主机、第二主机、第一plc系统、第二plc系统、焊接机器人和打磨机器人;
6.所述第一主机和所述第二主机通过交换机与所述总控服务器通过tcp协议进行数据交互;第一plc系统与焊接机器人通过modbus协议进行数据交互,并与第一主机通过tcp协议进行数据交互;第二plc系统与打磨机器人通过modbus协议进行数据交互,并与第二主机通过tcp协议进行数据交互。
7.可选的,所述系统还包括:ccd相机、焊缝跟踪器和熔池监测摄像头,所述ccd相机、焊缝跟踪器和熔池监测摄像头均与交换机通过tcp协议进行数据交互。
8.可选的,所述总控服务器规划最优无碰撞路径,并通过tcp协议向第一主机下发焊接任务,向第二主机下发打磨任务。
9.可选的,所述焊接机器人至少为两个,所述打磨机器人至少为两个。
10.可选的,焊接完成后,所述总控服务器根据所述ccd相机获得的焊缝缺陷信息,并将焊缝缺陷所处位置坐标通过交换机传输给打磨机器人,控制所述打磨机器人进行逐点打磨。
11.可选的,所述总控服务器通过所述交换机获取各机器人的位置坐标,并根据所述位置坐标计算机器人之间的空间距离。
12.本说明书实施例提供的一种多机器人控制方法,所述方法包括:
13.总控服务器通过tcp协议向第一主机和第二主机分别下发焊接任务和打磨任务,并规划最优无碰撞路径;
14.焊接机器人配合焊缝跟踪器和熔池监测摄像头执行焊接任务;
15.焊接完成后,所述总控服务器根据所述ccd相机获得的焊缝缺陷信息,并将焊缝缺陷所处位置坐标通过交换机传输给打磨机器人,控制所述打磨机器人进行逐点打磨。
16.可选的,将焊点分配问题转化成多背包问题,采用基于k均值聚类算法解决多背包
问题,运用任务量方差最小化方式,让不同的机器人有最大程度相近的任务量,来实现多机器人焊接任务均衡分配的优化算法。
17.可选的,所述总控服务器通过所述交换机获取各机器人的位置坐标,并根据所述位置坐标计算机器人之间的空间距离。
18.可选的,所述总控服务器为各机器人设置优先级,不同的优先级的机器人在干涉区内相遇时,优先级较高的机器人按原先规划路径焊接,优先级较低的机器人把优先级较高的机器人看作障碍物,并在路径规划过程中执行避障措施。
19.本说明书实施例采用的上述至少一个技术方案能够达到以下有益效果:
20.1、本发明采用tcp协议实现总控服务器与焊接主机、打磨主机以及配套检测硬件(包括ccd相机、焊缝跟踪系统和熔池监测系统)的数据交互,焊接主机与焊接机器人,以及打磨主机与打磨机器人通过modbus协议传输,真正意义上实现多焊接/打磨多机器人数据交互。
21.2、本发明基于k均值聚类算法解决多背包问题来求解实现多机器人焊接任务均衡分配的优化算法,通过数据交互系统获得的各机器人位置坐标计算机器人之间的空间距离,并通过设定机器人优先级,优先级较低的机器人把优先级较高的机器人看作障碍物,并在路径规划过程中执行避障措施,实现多机器人的协同控制。
22.3、本发明可以降低大型构件制造成本和周期,除可用于箱梁结构件和桁架结构件的加工制造,还可应用于众多涉及多机器人协作的场合,提高加工制造作业流程的自动化和智能化水平。
附图说明
23.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
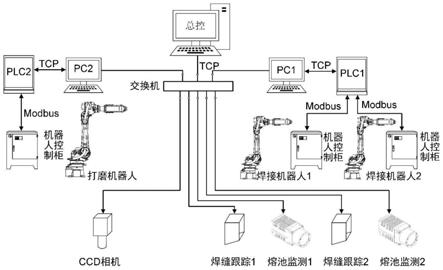
24.图1为本说明书实施例提供的一种多机器人数据交互系统的结构示意图;
25.图2为本说明书实施例提供的一种多机器人控制方法的流程示意图。
具体实施方式
26.为使本技术的目的、技术方案和优点更加清楚,下面将结合本技术具体实施例及相应的附图对本技术技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
27.近年来,世界上工业机器人技术水平日趋成熟,利用工业机器人完成焊接、打磨工序已经成为许多工业领域竞相发展的必然趋势。但是,我国在箱梁结构件机器人焊接的相关研发和生产上起步较晚,目前几乎所有大中型船舶与海工装备制造企业仅在平面分段肋板装焊上具有自动化装备,在分段焊接,尤其是箱梁结构件焊接完全依靠人工实施。
28.针对这种情况,本发明提供了一种多机器人数据交互系统和多机器人控制方法,总控服务器根据工件类型向焊接主机pc1和打磨pc2分别下发焊接和打磨任务。然后,焊接机器人配合焊缝跟踪器和熔池监测摄像头执行焊接任务。焊接完成后,打磨机器人配合ccd相机获得的焊缝缺陷信息位置坐标,执行逐点打磨任务,从而实现多个机器人的协同工作。
29.以下结合附图,详细说明本技术各实施例提供的技术方案。
30.图1为本说明书实施例提供的一种多机器人数据交互系统的结构示意图。如图1所述,所述多机器人数据交互系统包括:总控服务器、交换机、主机(pc1和pc2)、plc系统(plc1和plc2)、焊接机器人、打磨机器人,以及ccd相机、焊缝跟踪器和熔池监测摄像头等检测硬件。
31.其中,第一主机(pc1)和第二主机(pc2)通过交换机与所述总控服务器通过tcp协议进行数据交互;第一plc系统(plc1)与焊接机器人通过modbus协议进行数据交互,并与第一主机(pc1)通过tcp协议进行数据交互;第二plc系统(plc2)与打磨机器人通过modbus协议进行数据交互,并与第二主机(pc2)通过tcp协议进行数据交互。
32.所述ccd相机、焊缝跟踪器和熔池监测摄像头均与交换机通过tcp协议进行数据交互。其中,熔池监测摄像头有两个,可选的,还可以增加更多。
33.另外,焊接机器人、打磨机器人可以根据需求设置为多个,对应的,主机和plc系统的数量也会增加。
34.本发明的焊接/打磨多机器人数据交互系统,采用tcp协议实现总控服务器与焊接主机pc1、打磨主机pc2以及配套检测硬件(包括ccd相机、焊缝跟踪系统和熔池监测系统)的数据交互,焊接主机pc1与焊接机器人,以及打磨主机pc2与打磨机器人通过modbus协议传输,真正意义上实现多焊接/打磨多机器人数据交互。
35.图2为本说明书实施例提供的一种多机器人控制方法的流程示意图。
36.如图2所示,该流程可以包括以下步骤:
37.步骤110:总控服务器通过tcp协议向第一主机和第二主机分别下发焊接任务和打磨任务,并规划最优无碰撞路径。
38.步骤120:焊接机器人配合焊缝跟踪器和熔池监测摄像头执行焊接任务。
39.步骤130:焊接完成后,所述总控服务器根据所述ccd相机获得的焊缝缺陷信息,并将焊缝缺陷所处位置坐标通过交换机传输给打磨机器人,控制所述打磨机器人进行逐点打磨。
40.在一个或者多个实施例中,将焊点分配问题转化成多背包问题,采用基于k均值聚类算法解决多背包问题,运用任务量方差最小化方式,让不同的机器人有最大程度相近的任务量,来实现多机器人焊接任务均衡分配的优化算法。
41.在一个或者多个实施例中,所述总控服务器通过所述交换机获取各机器人的位置坐标,并根据所述位置坐标计算机器人之间的空间距离。
42.在一个或者多个实施例中,所述总控服务器为各机器人设置优先级,不同的优先级的机器人在干涉区内相遇时,优先级较高的机器人按原先规划路径焊接,优先级较低的机器人把优先级较高的机器人看作障碍物,并在路径规划过程中执行避障措施。
43.本发明的多机器人控制方法,基于k均值聚类算法解决多背包问题来求解实现多机器人焊接任务均衡分配的优化算法,并规划最优无碰撞路径。整个作业过程中,各机器人通过数据交互系统获得的各机器人位置坐标计算机器人之间的空间距离,并设定机器人优选级,优选级低的机器人在路径规划过程中执行避障措施,实现焊接/打磨多机器人协同作业。
44.本发明的多机器人数据交互系统和多机器人控制方法,可以改善目前大型构件加
工制造主要依靠人工,面临效率低下、质量无法保证、工期不可预测、工人劳动强度大、作业环境恶劣等现状,可以降低大型构件制造成本和周期,并提高加工制造作业流程的自动化和智能化水平。
45.还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、商品或者设备中还存在另外的相同要素。
46.本技术可以在由计算机执行的计算机可执行指令的一般上下文中描述,例如程序模块。一般地,程序模块包括执行特定任务或实现特定抽象数据类型的例程、程序、对象、组件、数据结构等等。也可以在分布式计算环境中实践本技术,在这些分布式计算环境中,由通过通信网络而被连接的远程处理设备来执行任务。在分布式计算环境中,程序模块可以位于包括存储设备在内的本地和远程计算机存储介质中。
47.本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于系统实施例而言,由于其基本相似于方法实施例,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。
48.以上所述仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1