一种一体化弹性液压机器人关节
1.本发明涉及机器人关节技术领域,尤其是涉及一体化弹性液压机器人关节。
背景技术:
2.液压驱动具有高功率密度、大扭力输出的优势,液压机器人关节常应用于可穿戴的外骨骼机器人以及双足、四足等足式机器人。此外,为增加人机交互、机器人与环境交互过程中的柔顺性,弹性元件(弹簧)也常被集成至液压机器人关节中,如专利cn106965870b、cn107042510b所公开的弹性液压机器人关节。然而,目前的液压机器人关节在如下两个方面仍有待改进。首先,其往往需要通过管路连接至液压站,管路造成了重量和体积的增大、阻尼能量损失以及泄漏风险的增大;其次,与液压缸串联(或并联)的压缩(或拉伸)弹簧造成了关节长度或宽度的成倍增加,紧凑性不足。
技术实现要素:
3.本发明的目的在于克服上述现有技术的不足,提供一种一体化弹性液压机器人关节,紧凑地将连杆、旋转弹性体、液压缸、电机、液压泵、液压阀、传感器、油箱、控制器等集成在一起,接通电源即可实现作动。
4.为达到上述目的,本发明的技术方案是:
5.一种一体化弹性液压机器人关节,包括供油系统、液压缸、上连杆、支架和旋转弹性体,所述液压缸上部与供油系统固定连接且供油系统提供液压缸油液,液压缸上部与上连杆的铰接连接,所述旋转弹性体包括外圈、内圈、弹簧,所述外圈和内圈通过轴承二连接,所述弹簧两端分别连接于外圈和内圈,所述外圈和内圈可相对旋转以使弹簧发生形变,所述上连杆与内圈通过轴承一连接,所述支架固定连接于内圈,所述液压缸包括位于下端的可伸缩的液压杆,所述液压杆的下端与外圈铰接连接。
6.所述供油系统包括油箱、阀块、液压泵和电机,所述液压缸的油口与阀块连接并进行端面密封,阀块设有连通液压缸、液压泵和油箱的流道,所述电机驱动液压泵旋转产生提供液压缸的油液。
7.所述内圈包括内圈主体和位于内圈主体外壁的内圈凸缘,所述内圈凸缘的外缘周向设有内支撑杆,所述外圈的数量为两个,每个外圈通过一个轴承二连接于内圈主体外周壁,两个外圈通过周向分布的外支撑杆连接,所述弹簧为周向分布且弹簧的两端分别连接于外支撑杆和内支撑杆。
8.所述弹簧的两端设有钩子,弹簧通过钩子连接于外支撑杆和内支撑杆,内外相对应的一个内支撑杆和一个外支撑杆连接两个弹簧且两个弹簧的钩子朝向相反。
9.所述旋转弹性体安装有用于测量外圈和内圈的角度差的角度编码器。
10.所述外圈的数量为两个且两个外圈通过缸杆铰接杆连接,所述液压杆的下端与缸杆铰接杆铰接连接。
11.所述缸杆铰接杆包括连接两个外圈的杆一、位于两个外圈外的杆二和定位片,所
述杆一一端伸出两个外圈外且与杆二平行,所述定位片贴合一个外圈的外壁,所述杆一伸出两个外圈外的一端和杆二远离外圈的一端连接安装片,所述液压杆一端铰接连接于杆一伸出两个外圈外的一端且液压杆端部的两侧贴合设有轴套,两个轴套套于杆一伸出两个外圈外的一端外壁且两个轴套分别贴合定位片和安装片。
12.所述上连杆连接一个绑腿装置,所述支架通过下连杆连接另一个绑腿装置,两个绑腿装置分别连接到机器人的大腿和小腿,所述大腿和小腿为同侧的。
13.所述供油系统还包括控制器和测量液压缸的油液压力的压力传感器,所述控制器电连接角度编码器、压力传感器和电机内置的编码器信息。
14.所述控制器安装于油箱上端,压力传感器安装于阀块。
15.本发明的有益效果是:
16.1、紧凑地将连杆、旋转弹性体、液压缸、电机、液压泵、液压阀、传感器、油箱、控制器等集成在一起,省去了管路连接,提高了集成度和能量利用率,降低了泄漏风险,接通电源即可实现作动;
17.2、利用旋转弹性体将位置控制直观地转换为力控制,仅需控制旋转弹性体内外圈的角度差即可控制关节输出力,带来的被动柔性还起到吸收冲击载荷,保护人机交互安全性的效用;
18.3、利用泵控的驱动方式,消除了阀口节流带来的能量浪费和发热,进一步提高了能量的利用效率。
附图说明
19.图1为本发明的实用示意图;
20.图2为图1的局部放大图一;
21.图3为图1的局部视图;
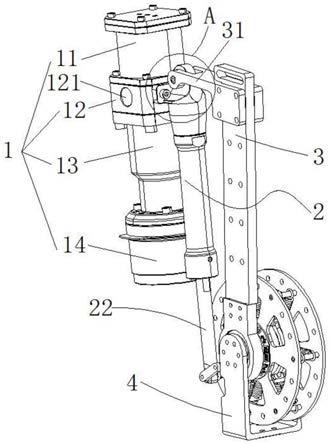
22.图4为本发明的立体图;
23.图5为图4中a处的放大图;
24.图6为图4的局部视图;
25.图7为图6的主视图;
26.图8为本发明的局部立体图;
27.图9为本发明的外圈、液压杆、缸杆铰接杆配合的爆炸图;
28.图10为本发明的旋转弹性体的立体图;
29.图11为本发明的旋转弹性体的爆炸图;
30.图12为本发明的旋转弹性体的剖视图一;
31.图13为本发明的旋转弹性体的剖视图二。
32.图中:供油系统1、油箱11、阀块12、阀块孔121、液压泵13、电机14、压力传感器引出线15、液压缸2、液压缸端盖21、端盖连接部211、端盖铰接部212、液压杆22、液压缸外壳23、上连杆3、连杆过渡杆31、连杆接杆32、轴承一33、支架4、下连杆41、旋转弹性体5、外圈51、外圈轴承座511、内圈52、内圈主体521、内圈凸缘522、内支撑杆523、轴承二53、弹簧54、外支撑杆55、缸杆铰接杆56、杆一561、杆二562、定位片563、安装片57、轴套58、角度编码器6、绑腿装置7、机器人8、大腿81、小腿82。
具体实施方式
33.下面通过实施例,并结合附图,对本发明的技术方案作进一步说明。
34.如图1
‑
图13所示,一种一体化弹性液压机器人关节,包括供油系统1、液压缸2、上连杆3、支架4和旋转弹性体5。
35.参照图4,所述供油系统1包括从上往下依次连接的油箱11、阀块12、液压泵13和电机14,所述供油系统1还包括控制器(图中未画出)和测量液压缸2的油液压力的压力传感器(图中未画出),所述控制器安装于油箱11上端,压力传感器安装于阀块12。阀块12的一侧壁设有阀块孔121,阀块孔121用于安装压力传感器,参照图3,压力传感器引出线15由压力传感器所在处引出。
36.所述液压缸2上部与供油系统1固定连接且供油系统1提供液压缸2油液,所述液压缸2包括位于下端的可伸缩的液压杆22,参照图5,液压缸2还包括液压缸外壳23,液压缸外壳23的远离液压杆22一端安装有液压缸端盖21,液压缸端盖21包括端盖连接部211和端盖铰接部212,端盖连接部211固定安装于阀块12,所述液压缸2的油口与阀块12连接并进行端面密封,即端盖连接部211设有连通液压缸外壳23内部的油口,阀块12与端盖连接部211连接处也设有对应的油口并配合密封。供油系统1通过油口给液压缸2提供油液。
37.液压缸2上部与上连杆3的铰接连接,上连杆3的上端连接有连杆过渡杆31,上连杆3和连杆过渡杆31可以是一体成型或分体式设计,连杆过渡杆31与端盖铰接部212铰接连接。
38.所述旋转弹性体5包括外圈51、内圈52、弹簧54,所述外圈51和内圈52通过轴承二53连接,所述内圈52包括内圈主体521和位于内圈主体521外壁的内圈凸缘522,所述外圈51的数量为两个,两个外圈51对称设置,每个外圈51通过一个轴承二53连接于内圈主体521外周壁,外圈51的中心设有外圈轴承座511,轴承二53安装于对应的外圈轴承座511内。
39.所述弹簧54两端分别连接于外圈51和内圈52,所述外圈51和内圈52可相对旋转以使弹簧54发生形变,当外圈51和内圈52产生角度差,弹簧54形变产生拉力,进而产生扭矩。
40.所述内圈凸缘522的外缘周向设有内支撑杆523,两个外圈51通过周向分布的外支撑杆55连接,参照图13,可以在外支撑杆55的两端拧入螺钉实现外支撑杆55与外圈51的连接限位。所述弹簧54为周向分布且弹簧54的两端分别连接于外支撑杆55和内支撑杆523。内支撑杆523设有沿其长度贯穿的螺纹孔,通过在该螺纹孔两端拧入螺钉以使弹簧54不会脱出。
41.参照图11,所述弹簧54的两端设有钩子,弹簧54通过钩子连接于外支撑杆55和内支撑杆523,内外相对应的一个内支撑杆523和一个外支撑杆55连接两个弹簧54且两个弹簧54的钩子朝向相反,这样能够兼顾系统的正反转。
42.所述上连杆3与内圈52通过轴承一33连接,参照图7,上连杆3的下端连接连杆接杆32,连杆接杆32与内圈主体521外壁通过轴承一33连接。
43.参照图7,所述支架4固定连接于内圈52,支架4为u型支架,支架4两侧与内圈主体521两端面通过螺栓连接。
44.所述液压杆22的下端与外圈51铰接连接。所述外圈51的数量为两个且两个外圈通过缸杆铰接杆56连接,所述液压杆22的下端与缸杆铰接杆56铰接连接。
45.参照图8
‑
9,所述缸杆铰接杆56包括连接两个外圈51的杆一561、位于两个外圈51
外的杆二562和定位片563,所述杆一561一端伸出两个外圈51外且与杆二562平行,杆一561一端拧入螺钉贴合一个外圈51的外壁,另一个外圈51的外壁通过定位片563贴合。
46.所述定位片563贴合一个外圈51的外壁,所述杆一561伸出两个外圈51外的一端和杆二562远离外圈51的一端连接安装片57,所述液压杆22一端铰接连接于杆一561伸出两个外圈51外的一端且液压杆22端部的两侧贴合设有轴套58,两个轴套58套于杆一561伸出两个外圈51外的一端外壁且两个轴套58分别贴合定位片563和安装片57。轴套58用于限定液压杆22的轴线移动,杆二562可防止液压杆22运动超范围。
47.参照图2,所述上连杆3连接一个绑腿装置7,所述支架4通过下连杆41连接另一个绑腿装置7,支架4和下连杆41一体成型或分体式设计,两个绑腿装置7分别连接到机器人8的大腿81和小腿82,所述大腿81和小腿82为同侧的。
48.所述旋转弹性体5安装有用于测量外圈51和内圈52的角度差的角度编码器6。参照图10,角度编码器6包括两个环体(此为角度编码器6的现有技术),其中一个环体固定安装于内圈主体521的外壁,另一个环体固定安装于一个外圈51的外壁,两个环体配合测量外圈51和内圈52的角度差并传输至控制器。
49.阀块12设有连通液压缸2、液压泵13、压力传感器和油箱11的流道,流道内嵌有所需的安全阀、单向阀等液压阀门;压力传感器测量液压缸2所连通的流道内的油液压力,进而可以计算出液压缸2的作用力,并传输至控制器。
50.所述控制器电连接角度编码器6、压力传感器和电机14内置的编码器信息。电机14内置的编码器能够测量电机14转速。控制器根据角度编码器6、压力传感器以及电机14内置的编码器信息,对电机14进行驱动和控制。
51.所述电机14驱动液压泵13旋转产生提供液压缸2的油液。液压泵13由电机14进行驱动,从油箱11吸油进而产生高压油液使液压缸2作动。
52.本发明的具体实施工作过程如下:
53.在接通电源后,电机14驱动液压泵13旋转从油箱11吸取低压油液,输出高压油液至阀块12,通过阀块12内的流道进入液压缸2;液压缸2通过缸杆铰接杆12推动旋转弹性体5的两个外圈51同步转动,进而与内圈52之间产生角度差,并使弹簧54产生形变;弹簧54的拉力带动内圈52转动,进而使与其固定的支架4和下连杆41转动;旋转弹性体5的内外圈角度差由角度编码器6测量并反馈给控制器,控制器根据角度差、压力传感器反馈的油液压力信息、电机14内置编码器信息控制电机14的转速,进而控制上连杆3与下连杆41之间的关节扭矩。
54.一方面,本发明中紧凑地将连杆、旋转弹性体5、液压缸2、电机14、液压泵13、液压阀、传感器、油箱11、控制器等集成在一起,省去了管路连接,提高了集成度和能量利用率,降低了泄漏风险,接通电源即可实现作动;另一方面,旋转弹性体5将位置控制直观地转换为力控制,仅需控制旋转弹性体5内外圈的角度差即可控制关节输出力,带来的被动柔性还起到吸收冲击载荷,保护人机交互安全性的效用;再者,利用泵控的驱动方式,消除了阀口节流带来的能量浪费和发热,进一步提高了能量的利用效率。综上,本发明在提高机器人关节集成度、柔顺性、可靠性及能量利用效率等方面取得了突出显著的技术效果。
55.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1