一种医疗用机器人装置、系统及方法与流程
1.本发明属于人工智能机器人健康医疗设备技术领域,涉及机器人技术领域,图像智能识别方法,智能化设备及系统。
背景技术:
2.目前应用于医疗领域,在检查过程,由于各种人为因素分析,医疗图像,视频采集质量差,标准化程度低,识别病情精准度差。各专科医生领域及医疗专业受限,多科室多专家联合会诊,在门诊,病房与患者一起讨论病情很难实现。管理员远端控制,远端联合会诊,病房专家联合查房,联合治疗的机器人装置,机器人平台涉及机器人理论,实践技术。
3.因疫情等感染性高,效率低下,人工采集不精准,瘟疫传播等问题严重,利用机器臂远端及自主采集医疗图像,视频。
4.利用机器人搭载的机器臂,视觉装置,深度视觉装置及各种神经网络方法及其改进方法,辅助采集医疗图像,视频,实现远端采集,自主采集,感染性检测,智能化分析数据,有效防止传染病,瘟疫等重大疾病蔓延。
5.技术问题
6.本发明的目的就在于克服上述现有技术的缺点和不足,提供一种医疗用机器人装置,利用远端,自主机器人采集医疗图像装置,解决了人为的扫查,检查采集诊断治疗失误,以及单一诊疗科的局限性及诊断方案的单一性等问题。
7.雷达,移动底座实现自主移动,建图定位导航,解决移动采集问题。
8.平面视觉装置,深度视觉装置,智能识别平面信息,骨骼等深度信息。
9.通过机器人搭载的医疗图像采集装置,实现机器人远端控制,自主采集,解决医护人员作业压力大,采集任务繁多等问题。提高专家,医生远端实时问诊,查房,多科室联合会诊的灵活性实时性,高效率多治疗方案多专家共同意见解决临床案例。
10.本发明的采用的技术方案
11.一种医疗用机器人装置包括:
12.机器人主系统,所述机器人主系统模块,用于连接并控制机器人装置模块,包括:语音装置及语音模块,视觉采集装置及视觉识别模块,雷达移动自主建图定位导航装置及模块,机器扫查臂与信息验证机器臂,超声诊疗装置及医疗图像视频采集共享模块,超声扫查装置,压力装置,信息采集读取装置,卧位,位姿,角度调解装置。
13.视觉采集装置及视觉识别模块,用于采集图像,视频,识别图像,视频。所述的视觉采集装置包括:平面视觉装置,深度视觉装置。
14.语音装置及语音模块,用于采集并识别声音,用户间管理员间的语音交互,语音问诊。
15.雷达自主移动,建图定位导航装置及模块,所述装置包括:移动底座及雷达,用于自建地图自主定位导航移动。
16.机器臂,所述的机器臂,包括机器扫查臂与信息验证机器臂,所述的机器扫查臂用
于采集医疗图像,视频;所述的信息验证机器臂用于采集,扫描,识别,读取二维码,数字码,文字,标识,生物信息,rfid信息,患者用户信息。
17.超声诊疗装置及医疗图像视频采集共享模块用于采集医疗图像,视频,共享医疗图像,视频,远端会诊,多科室联合会诊,图像共享。
18.超声扫查装置,用于扫查,采集图像,视频。
19.压力装置,用于施压,扫查。
20.信息采集读取装置,用于扫描,识别,读取二维码,数字码,文字,标识,生物信息,rfid信息,患者,用户信息。
21.卧位,位姿,角度调解装置,按标准的扫查要求,调解各扫查任务的位置,角度,方向。
22.通信模块,所述的通信模块分别与机器人主系统,远端客户端连接,用于远端客户端与机器人主系统间的通信。通信模块包括,无线通信模块,蓝牙通信模块,有线互联网通信模块,射频通信,无线电通信中的一种及多种通信方式。
23.远端控制及自主控制,双模式控制医疗用机器人内各装置,各模块,各节点。远端客户端与机器人主系统间利用通信模块通信,控制各装置。远端控制及自主控制双机器臂动作,机器扫查臂与超声扫查装置连接,信息验证机器臂与信息采集读取装置连接,通过管理员调解设置参数及通过神经网络改进方法训练机器人学习规划动作及自适应调解设置动作规划参数,用于动作规划,实现所述的采集医疗图像,视频,读取识别二维码,数字码,文字,标识,生物信息,rfid信息,患者,用户信息。
24.所述的语音装置及语音模块,机器人主系统与语音装置连接,用于采集并识别声音,用户间管理员间的语音交互,问诊。
25.语音装置包括:声音采集装置,语音输入装置,语音输出装置;
26.语音模块包括:语音识别,语音文字互转,语音合成,声纹识别,语音指令,语音引导功能。
27.所述的视觉采集装置及视觉识别模块,机器人主系统与视觉采集装置连接,用于采集图像,视频,识别图像,视频;
28.所述的视觉采集装置包括:平面视觉装置,深度视觉装置;
29.视觉识别模块包括:
30.平面图像识别包括:人脸图像及位置识别,五官图像及位置识别,人体特征点及位置识别,医疗场景识别;
31.深度图像识别包括:骨骼图像及位置识别,关节图像及位置识别,关键关节及位置识别,人体的特征点及位置识别,特殊特征以及其位置的识别;
32.超声装置采集的医疗图像,视频识别包括:超声装置扫查的血管,器官,器官形状,结构,轮廓,颜色的特征点识别,病症的特征识别,超声采集的图像,视频识别。
33.所述雷达自主移动医疗场景识别建图模块是将雷达,视觉装置与机器人主系统连接,
34.雷达自主定位、导航、实时建图,
35.视觉装置及智能识别方法识别人脸及医疗场景,医疗场景包括:地址、科室、病房门牌的字母、数字、文字、床位号与雷达实时建图融合,自主定位、导航、移动至对应科室、病
房、床位、用户位置。
36.所述的双机器臂,所述的机器臂包括机器扫查臂与信息验证机器臂,
37.所述的机器扫查臂,与扫查装置,压力装置连接,用于采集医疗图像,视频;
38.所述的信息验证机器臂,与信息采集装置,信息扫描装置,读取装置连接,与机器人主系统,视觉装置连接,用于采集,扫描,读取数字码,二维码,rfid,生物特征,智能识别读取二维码,数字码,文字,标识,生物信息,rfid信息,患者用户信息。与卧位,位姿,角度调解装置连接,致动卧位,位姿,角度调解装置,使医疗对象按标准的扫查要求,调解各扫查任务的位置,角度,方向。
39.所述的超声诊疗装置及医疗图像视频采集共享模块,所述的超声诊疗装置及医疗图像视频采集共享模块与机器人主系统连接,用于远端控制及自主采集医疗图像,视频,共享医疗图像,视频,远端会诊,多科室联合会诊。
40.所述的超声探头扫查装置及压力装置,所述的超声探头扫查装置与机器扫查臂,压力装置连接,机器人主系统及远端客户端控制超声探头扫查装置与机器臂移动,扫查,采集图像,视频。
41.压力装置,所述的压力装置与超声探头扫查装置,机器扫查臂连接,机器人主系统及远端客户端控制压力装置施压,探头扫查。
42.所述的信息验证机器臂,与信息采集装置,信息扫描装置,读取装置连接,与机器人主系统,视觉装置连接,用于采集,扫描,读取数字码,二维码,rfid,生物特征,智能识别读取二维码,数字码,文字,标识,生物信息,rfid信息,患者用户信息。
43.所述的信息验证机器臂,与机器人主系统,卧位,位姿,角度调解装置连接,致动卧位,位姿,角度调解装置,使医疗对象按标准的扫查要求,调解各扫查任务的位置,角度,方向。
44.一种最优化任务配置管理系统,其特征在于,包括:一种医疗用机器人装置、多个科室的医护任务子系统和1个呼叫子系统,所述医疗用机器人装置为上述任一方案中医疗用机器人装置,所有多个科室的医护任务子系统和1个呼叫系子统与机器人主控制系统连接,搭建在最优化任务管理系统平台上。
45.进一步,一种远端控制及自主定位导航移动,最优化任务配置方法,其包括以下步骤:
46.s1、管理员,医生通信模块,发布采集任务,采集的时间信息,位置信息,医嘱消息,服务。
47.s2、利用最优化任务配置方法,动态分配任务至机器人装置。
48.进一步,动态的任务分配方法:一种动态最优化的任务配置,路径规划方法,采用最优化的方法规划任务,目标为最短的时间完成所有任务。最优化的方法包括:遗传计算方法及其改进方法,禁忌搜索计算方法及其改进方法,模拟退火计算方法及其改进方法,蚁群计算方法及其改进方法,粒子束最优化的计算方法及其改进方法,神经网络计算方法及其改进方法,进化方法及其改进方法中的一种及多种联合方法。
49.s3、机器人利用通信模块,发布病患位置信息包括:病患病房,门诊,科室,床位位置信息,雷达定位导航模块订阅病患位置信息,自主移动到采集区。
50.s4、机器人利用视觉模块,识别通信模块发布信息服务,雷达定位导航模块订阅位
置信息服务,自主移动到采集区。
51.s5、机器人利用通信模块发布采集位置,任务信息,时间信息,机器臂订阅固定装置,采集位置信息,动作规划模块订阅位置信息。
52.s6、机器人依照步骤s6的位置信息,按照动作规划模块,采集超声数据,超声图像动作。
53.s7、返回任务完成信息至管理员。如果未完成,将任务移入下一时间段。
附图说明:
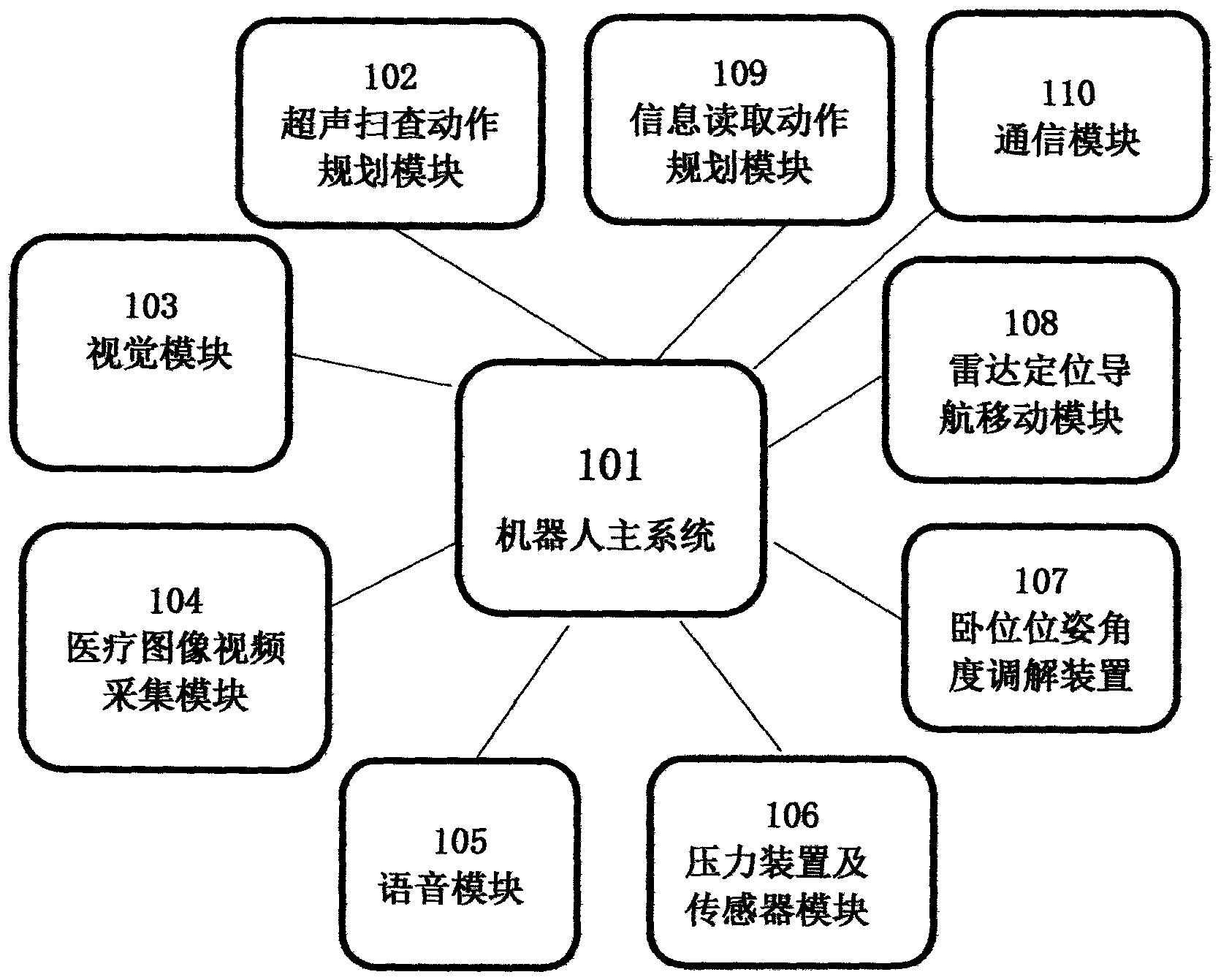
54.图1是本技术说明书中医疗用机器人装置模块示意图;
55.附图1标记:
56.101
‑
机器人主系统;102
‑
采集动作规划模块;103
‑
视觉模块;
57.104
‑
医疗图像视频采集模块;105
‑
语音模块;106
‑
压力装置及传感器模块;
58.107
‑
卧位位姿角度调解装置;108
‑
雷达建图定位导航移动模块;
59.109
‑
信息读取动作规划模块;110
‑
通信模块;
60.图2是本技术说明书中医疗用机器人装置组成结构示意图;
61.附图2标记:
62.201视觉采集装置;202
‑
机器人主系统;203
‑
超声诊断装置;204
‑
压力装置;
63.205
‑
超声扫查探头;206
‑
雷达;207
‑
移动装置;208
‑
信息验证机器臂;
64.209
‑
机器扫查臂;210
‑
信息扫描装置;211
‑
卧位,位姿,角度调解装置;
65.212
‑
语音装置;213远端客户端;
具体实施方式
66.本发明的目的是设计取代人类工作的可远端控制机器人,实现远端控制机器臂采集,同时有效解决自主采集图像,视频。利用人工智能机器人技术,自动化领域的自主采集,机器臂动作规划,深度摄像头采集人脸,五官,手臂,人体外部特征,骨骼,关节图像。
67.实现远端控制机器人及自主采集医疗图像,视频,远端控制医疗图像,视频采集装置及共享图像,解决了人为的诊断治疗失误,提高了智能采集的精准度和医疗数据异常识别的准确度。为了更好的理解上述技术方案,下面结合实施例及附图,对本发明作进一步地的详细说明,但本发明的实施方式不限于此。
68.本技术实施中的技术方案为解决上述技术问题的总体思路如下:
69.提供一种医疗用机器人装置,利用远端,机器人自主采集医疗图像装置。
70.提供利用雷达,移动底座实现自主移动,建图定位导航,解决移动采集问题。
71.提供利用平面视觉装置,深度视觉装置,智能识别平面信息,骨骼及深度信息。
72.通过医疗装置,医疗图像,视频采集装置,实现机器人远端控制,自主采集,解决医护人员作业压力大,采集任务繁多等问题。
73.实施例1:
74.下面结合实施例及附图1,附图2,对本发明作进一步地的详细说明,但本发明的实施方式不限于此。
75.机器人主系统101,所述机器人主系统101模块,用于连接并控制机器人装置模块,
包括:语音装置212及语音模块105,视觉采集装置201及视觉识别模块103,雷达移动自主建图定位导航装置及模块108,机器扫查臂209与信息验证机器臂208,超声诊疗装置203及医疗图像视频采集共享模块104,超声扫查装置205,压力装置106,信息采集读取装置109,卧位,位姿,角度调解装置107。
76.视觉采集装置201及视觉识别模块103,用于采集图像,视频,识别图像,视频。所述的视觉采集装置201包括:平面视觉装置,深度视觉装置。
77.语音装置212及语音模块105,用于采集并识别声音,用户间管理员间的语音交互,语音问诊。
78.雷达自主移动,建图定位导航装置及模块108,所述装置包括:移动底座207及雷达206,用于自建地图自主定位导航移动。
79.机器臂,所述的机器臂,包括机器扫查臂209与信息验证机器臂208,所述的机器扫查臂209用于采集医疗图像,视频;所述的信息验证机器臂208用于采集,扫描,识别,读取二维码,数字码,文字,标识,生物信息,rfid信息,患者用户信息。
80.超声诊疗装置203及医疗图像视频采集共享模块104用于采集医疗图像,视频,共享医疗图像,视频,远端会诊,多科室联合会诊,图像共享。
81.超声扫查装置205,用于扫查,采集图像,视频。
82.压力装置106,用于施压,扫查。
83.信息采集读取装置109,用于扫描,识别,读取二维码,数字码,文字,标识,生物信息,rfid信息,患者,用户信息。
84.卧位,位姿,角度调解装置107,按标准的扫查要求,调解各扫查任务的位置,角度,方向。
85.通信模块,所述的通信模块分别与机器人主系统101,远端客户端213连接,用于远端客户端与机器人主系统101间的通信。通信模块包括,无线通信模块,蓝牙通信模块,有线互联网通信模块,射频通信,无线电通信中的一种及多种通信方式。
86.实施例2:
87.本发明的最优化任务管理系统及一种医疗用机器人装置实施方法如下:
88.利用最优化任务管理系统,医护管理员为多个科室,病房的的患者排配时间
‑
及其各时间段对应的任务,将所有的任务添加到最优化任务管理系统,医疗用机器人装置按照日期,时间、对应科室,病房,收到最优化任务管理系统管理员分配的任务。
89.管理员用户,专家用户登录最优化任务管理系,远端控制机器人,管理各自科室,病房管辖区下的机器人,添加,修改,删除,查询,动态实时排班机器人各种任务,与医疗区呼叫系统连接,远端问诊,联合会诊治疗管辖区患者,发送医嘱信息,接受患者留言,回复患者留言。
90.按照时间段及对应时间段的机器人任务,各时间段的对任务用雷达模块108及视觉模块103进行路径规划。并应用采集动作规划模块102,语音模块105,医疗图像视频采集模块104分别处理不同任务。
91.当处理采集任务时,机器人利用动作规划的采集动作规划模块102。采集步骤如下:
92.管理员通发布医嘱,排配任务.机器人利用语音装置215语音模块105,语音合成技
术,语音记录,语音转文字识别医嘱。
93.机器人利用病患位置信息,病患病房,科室,床位位置信息。雷达207导航自主移动到病床。机器人利用摄像头201及视觉模块103,识别人脸,五官,特征,及其位置。识别手指,趾末端,手臂各关节,各关节位置。机器人按照动作规划模块102,109,采集图像,视频射动作。返回任务完成信息至管理员。如果未完成,将任务移入下一时间段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1