基于柔顺驱动的变瞬心仿生下肢外骨骼机器人
1.本发明属于机器人技术领域,具体是涉及一种基于柔顺驱动的变瞬心仿生下肢外骨骼机器人。
背景技术:
2.外骨骼来源于生物学,它指的是一层强大的生物骨骼,可以保护和支撑身体的结构,外骨骼系统的特点是它与支撑、保护、运动三个功能紧密结合。外骨骼机器人是一种集成电力系统、传感系统和控制系统的人机一体化设备。它在结构上类似于双足步行机器人,不同的是它可以在身体外面穿,以改善人体的运动功能,并能通过人体的操作,来完成某些功能和任务。在军事行动领域,外骨骼机器人可以帮助士兵长途跋涉,装载大量的物资或武器,大大提高了个人作战能力和后勤的效率。在民事援助领域,外骨骼机器人可以帮助残疾人正常行走,同时也提高了该行业工人的处理能力。在医疗康复领域,康复外骨骼机器人能够有效地帮助偏瘫患者进行上肢或下肢康复训练,提高康复训练的效率,同时也能减轻医务人员的工作量。
3.我国是人口大国而且目前处于老龄化阶段,病人数量将会大幅度上升;另一方面,我国作为制造大国,虽然越来越多的劳动由自动化机械代替,但是复杂精细的劳动依然需要人力来实现,如建筑业、汽车制造业等,大量的搬运工作会导致许多关节疾病的产生,如关节炎、骨刺、腰痛、背痛等。因此医疗器械与我国民生密切相关,其中外骨骼机器人对关节疾病的治疗、防治和助力有着非常显著地效果。
4.目前,大部分的下肢柔性康复外骨骼采用的是绳驱方式,这样做的好处是减小了关节质量和惯量,但是这种结构设计缺少机械支撑,且绳驱输出上限由连接的绳子决定,输出上限不高,因为其关节摩擦大,在输出的过程中存在一定的能量耗损。
技术实现要素:
5.针对现有技术存在的不足,本发明提供了一种基于柔顺驱动的变瞬心仿生下肢外骨骼机器人。
6.为实现上述目的,本发明的采用以下技术方案:
7.一种基于柔顺驱动的变瞬心仿生下肢外骨骼机器人,包括依次连接的髋关节结构、膝关节结构和踝关节结构,髋关节结构、膝关节结构内的驱动器为串联弹性驱动器,所述串联弹性驱动器包括机架,所述机架包括电机安装架和外壳,电机安装架和外壳之间固定连接,所述电机安装架内设无框直流伺服电机,无框直流伺服电机内设传动轴,传动轴的输出端头连接谐波减速器,所述谐波减速器设于外壳内,谐波减速器的输出端固定连接输出连接盘,输出连接盘上设弹性元件,所述弹性元件用于与下级机构连接,用以输出平缓的力矩。
8.优选地,所述弹性元件包括固定盘和环型外圈,固定盘和环形外圈之间均匀设有三条s形扭力梁,相邻扭力梁之间夹角为120
°
,所述固定盘与输出连接盘之间固定连接,所
述环形外圈上设有螺纹孔,用以和下级机构连接。
9.优选地,所述弹性元件为弹簧钢材料且一体加工成型。
10.优选地,所述传动轴分别和无框直流伺服电机的定子、转子通过第一轴承连接,传动轴上固定设有输入连接盘,所述输入连接盘与无框直流伺服电机的转子固定连接。
11.优选地,电机安装架的端面设内圈口,所述外壳套设于内圈口上,外壳的内端口设有第一轴承板,第一轴承板和内圈口的端面固定连接,外壳的外端口设第二轴承板,输出连接盘的外端面设连接柱,传动轴上设轴肩,连接柱和第二轴承板之间、轴肩和第一轴承板之间分别通过第二轴承连接。
12.优选地,所述髋关节结构包括腰托、髋关节弹簧、大腿套筒、第一串联弹性驱动器、髋关节大腿连接件、输出板、第一套筒封口,腰拖的两端头分别连接第一串联弹性驱动器,第一串联弹性驱动器的弹性元件与输出板固定连接,输出板与髋关节大腿连接件的端口固定连接,髋关节大腿连接件的肋筋与大腿套筒固定连接,第一套筒封口通过螺钉滑动连接于大腿套筒下端的滑槽内,大腿套筒内设髋关节弹簧,髋关节弹簧与第一套筒封口固定连接。
13.优选地,膝关节结构包括第二串联弹性驱动器、膝关节大腿连接件、膝关节小腿连接件,膝关节大腿连接件的端面和第二串联弹性驱动器的弹性元件固定连接,膝关节大腿连接件的肋筋与第一套筒封口固定连接;膝关节大腿连接件的端面设有第一连接轴和半圆弧形槽,膝关节小腿连接件的端面设有第二连接轴和直线槽,膝关节小腿连接件的第二连接轴滑动连接于膝关节大腿连接件的半圆弧形槽槽内,膝关节大腿连接件的第一连接轴滑动连接于膝关节小腿连接件的直线槽内,从而实现膝关节的变瞬心运动。
14.优选地,踝关节结构包括小腿套筒、小腿弹簧件、套筒轴、第二套筒封口、第三轴承、第四轴承、踝关节转动座副、万向节、脚板座,第二套筒封口与膝关节小腿连接件固定连接,小腿弹簧件与第二套筒封口固定连接并置于小腿套筒内,第二套筒封口通过螺钉滑动连接于小腿套筒一端的滑槽内,小腿套筒另一端与套筒轴固定连接,套筒轴和踝关节转动座副通过第三轴承连接,踝关节转动座副、脚板座分别通过第四轴承和万向节连接。
15.优选地,还包括第三轴承板、第四轴承板,第三轴承板和踝关节转动座副连接,第四轴承板和套筒轴连接,用于第三轴承的定位。
16.与现有技术相比,本发明具有以下优点和有益效果:
17.1)本发明提出了采用柔顺直驱的方式进行驱动,为提高人机交互性,对于部分受力不大的结构和下肢外骨骼机器人的人机结合部分的机构进行了系统的改善。
18.2)本发明采用仿生学方法,模仿人膝的仿生设计理念,设计了膝关节的变瞬心转动结构,使得膝关节输出端能够更好地跟踪人体大腿的转动,减少了膝关节部分与人体实际运动的偏差,减少了膝关节对设备的额外负载,增加了设备的使用寿命,提高了穿戴舒适性。。
19.3)本发明设计的串联弹性驱动器结构紧凑,具有控制精度高,输出阻尼低,抗冲击载荷强等优点,并可以随着外部负载特性的变化调节自身阻抗特性,起到了在设备和外部负载之间增加一个柔性单元的作用,提高了设备的安全性。
附图说明
20.图1为本发明中串联弹性驱动器的整体结构爆炸示意图;
21.图2为串联弹性驱动器的机架结构示意图;
22.图3为串联弹性驱动器的无框直流伺服电机及相应连接件与谐波减速器结构示意图;
23.图4为串联弹性驱动器的弹性元件结构示意图;
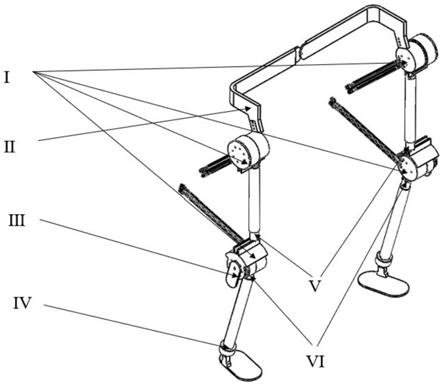
24.图5为本发明的整体结构示意图;
25.图6为本发明髋关节结构爆炸结构示意图;
26.图7为本发明膝关节结构爆炸结构示意图;
27.图8为本发明踝关节结构爆炸结构示意图;
28.图9是套筒封口的结构示意图。
具体实施方式
29.为了便于本领域普通技术人员理解和实施本发明,下面结合附图对本发明作进一步的详细描述,应当理解,此处所描述的实施示例仅用于说明和解释本发明,并不用于限定本发明。
30.如图1至图5所示,一种基于柔顺驱动的变瞬心仿生下肢外骨骼机器人,包括依次连接的髋关节结构ⅱ、膝关节结构ⅲ和踝关节结构ⅳ,髋关节结构ⅱ、膝关节结构ⅲ内的驱动器为串联弹性驱动器ⅰ,串联弹性驱动器ⅰ包括机架,机架包括电机安装架1和外壳10,电机安装架1和外壳10之间固定连接,电机安装架1内设无框直流伺服电机6,无框直流伺服电机6内设传动轴3,传动轴3的输出端头连接谐波减速器9,谐波减速器9设于外壳10内,谐波减速器9的输出端固定连接输出连接盘11,输出连接盘11上设弹性元件12,弹性元件12用于与下级机构连接,无框直流伺服电机6、谐波减速器9所输出的力矩,经过弹性元件12输出,可以得到平缓、柔顺的力矩,极大的增加穿戴者的舒适性和安全性。
31.在上述方案的基础上,弹性元件12包括固定盘121和环形外圈122,固定盘121和环型外圈122之间均匀设有三条s形扭力梁123,相邻扭力梁123之间夹角为120
°
,固定盘121与输出连接盘11之间固定连接,环形外圈122上设有螺纹孔,用以和下级机构连接。扭力梁123为s形,确保了在驱动器设计工作范围内,弹性元件12不会断裂,且弹性元件12的形变量可以达到预期的柔顺要求。
32.进一步,弹性元件12为弹簧钢材料且一体加工成型。
33.具体的,传动轴3分别和无框直流伺服电机6的定子、转子通过第一轴承连接2,传动轴3上固定设有输入连接盘7,输入连接盘7与无框直流伺服电机6的转子固定连接,以使转子驱动传动轴3。
34.进一步,电机安装架1的端面设内圈口101,外壳10套设于内圈口101上,外壳10的内端口设有第一轴承板8,第一轴承板8和内圈口101的端面固定连接,外壳10的外端口设第二轴承板5,输出连接盘7的外端面设连接柱,传动轴3上设轴肩,连接柱和第二轴承板5之间、轴肩和第一轴承板8之间分别通过第二轴承4连接,第一轴承板8和第二轴承板5对设置于外壳10内的部件进行轴向定位,使整体结构更为稳定和紧凑。
35.如图5至图9所示,髋关节结构ⅱ包括腰托13、髋关节弹簧14、大腿套筒15、第一串
联弹性驱动器16、髋关节大腿连接件17、输出板18、第一套筒封口,腰拖13的两端头分别连接第一串联弹性驱动器16,第一串联弹性驱动器16的弹性元件与输出板18固定连接,输出板18与髋关节大腿连接件17的端口固定连接,髋关节大腿连接件17的肋筋与大腿套筒15固定连接,第一套筒封口v过螺钉滑动连接于大腿套筒15下端的滑槽151内,大腿套筒15内设髋关节弹簧14,髋关节弹簧14与第一套筒封口v固定连接。其中,第一套筒封口v的结构示意图如图9所示。
36.如图7所示,膝关节结构ⅲ包括第二串联弹性驱动器19、膝关节大腿连接件20、膝关节小腿连接件21,膝关节大腿连接件20的端面和第二串联弹性驱动器19的弹性元件固定连接,膝关节大腿连接件20的肋筋与第一套筒封口v固定连接;膝关节大腿连接件20的端面设有第一连接轴201和半圆弧形槽202,膝关节小腿连接件21的端面设有第二连接轴(图略)和直线槽211,膝关节小腿连接件21的第二连接轴滑动连接于膝关节大腿连接件20的半圆弧形槽槽内202,膝关节大腿连接件20的第一连接轴201滑动连接于膝关节小腿连接件21的直线槽211内,从而实现膝关节的变瞬心运动。
37.如图8所示,踝关节结构ⅳ包括小腿套筒31、小腿弹簧件30、套筒轴29、第二套筒封口vi、第三轴承27、第四轴承23、踝关节转动座副25、万向节24、脚板座21,第二套筒封口vi与膝关节小腿连接件21固定连接,小腿弹簧件30与第二套筒封口vi固定连接并置于小腿套筒31内,第二套筒封口vi通过螺钉滑动连接于小腿套筒31一端的滑槽311内,小腿套筒31另一端与套筒轴29固定连接,套筒轴29和踝关节转动座副25通过第三轴承27连接,踝关节转动座副25、脚板座21分别通过第四轴承23和万向节24连接。其中,第二套筒封口vi的结构示意图如图9所示。
38.具体的,还包括第三轴承板28、第四轴承板26,第三轴承板28和踝关节转动座副25连接,第四轴承板26和套筒轴29连接,用于第三轴承27的定位。
39.本发明基于柔顺驱动的变瞬心仿生下肢外骨骼机器人工作时:首先将外骨骼缝合在软体织物制作的裤子上,使用者腿部穿戴下肢外骨骼机器人并通过绑带将大腿套筒15和小腿套筒31分别绑在穿戴者的大腿和小腿上,并将鞋绑在脚板座21上。当串联弹性驱动器工作时,可直接带动大腿套筒15和小腿套筒31运动,进而带动外骨骼穿戴者腿部及足部进行屈伸运动,以实现助力功能。
40.应当理解的是,上述针对较佳实施例的描述较为详细,并不能因此而认为是对本发明专利保护范围的限制,本领域的普通技术人员在本发明的启示下,在不脱离本发明权利要求所保护的范围情况下,还可以做出替换或变形,均落入本发明的保护范围之内,本发明的请求保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1