多软体臂空间目标消旋地面物理验证系统的制作方法
1.本发明属于空间机器人地面试验验证领域,涉及到一种多软体臂空间目标消旋地面物理验证系统设计,属于航天智能验证技术领域。
背景技术:
2.目前,国内外关于在太空使用的软体机械臂的研究较少,为了确保软体机械臂在空间微重力环境中能够完成预定工作,需要在地面环境中对软体机械臂完成预定工作的情况进行充分的试验,以获取最优的控制参数。因此,如何在地面环境中模拟空间微重力环境下软体机械臂的运动情况对于空间用软体机械臂的性能测试至关重要。通常可供采用的重力补偿方式主要有气浮方式、吊丝配重、水浮方式,以及自由落体方式。综合考虑这几种重力补偿方式的优缺点,选用气浮实验系统具有建造周期短、费用低、维护方便、负载大、试验持续时间长、模拟精度高和易于实现等优势。
技术实现要素:
3.本发明解决的技术问题是:克服现有技术的不足,提供了一种多软体臂空间目标消旋地面物理验证系统。
4.本发明的技术解决方案是:多软体臂空间目标消旋地面物理验证系统,包括抓捕者模拟器、至少两条软体机械臂、空间目标模拟器、气浮平台及软体臂气浮支撑、惯性测量单元imu、条状柔性薄膜压力传感器、抓捕控制器、目标控制器;
5.所述抓捕者模拟器、空间目标模拟器、软体臂气浮支撑均放置在所述气浮平台上;至少两条软体机械臂的根部安装在所述抓捕者模拟器上;所述软体臂气浮支撑用于抵消软体机械臂所受重力以及减小软体机械臂材料特性导致的变形下垂,在地面重力环境下使软体机械臂末端与空间微重力环境下软体机械臂末端运动规律一致;所述抓捕者模拟器、空间目标模拟器均通过气足作用使其处于空间微重力环境;
6.所述惯性测量单元imu用于实时测量空间目标模拟器的位姿、速度、加速度以及实时测量抓捕者模拟器位姿、速度、加速度;条状柔性薄膜压力传感器安装在软体机械臂与空间目标模拟器接触一侧,用于实时测量软体机械臂对空间目标模拟器的抱持力;
7.所述目标控制器用于根据惯性测量单元imu实时测量结果控制空间目标模拟器降维度模拟空间捕获目标的直线运动及自旋运动;
8.所述抓捕控制器用于根据实时测量的抱持力控制所述软体机械臂抓抱空间目标模拟器,并对空间目标模拟器进行消旋。
9.优选的,所述的软体臂气浮支撑包括底座、支撑杆、夹具;所述底座的底部安装气足,通过气足抵消软体机械臂以及软体臂气浮支撑的重力影响,使软体机械臂处于模拟的空间微重力环境;所述底座的上端面通过支撑杆支撑夹具,所述夹具用于夹持软体机械臂,所述支撑杆可沿重力方向伸缩,以适应软体机械臂的不同安装高度。
10.优选的,所述夹具包括夹具底座、多个夹爪;所述夹具底座上平行设置多个导轨,
所述夹爪的夹持面为圆弧面,夹爪安装在所述导轨内且相邻夹爪的夹持面的开口方向相反。
11.优选的,相邻两个夹爪中一个相对夹具底座固定,另外一个通过弹性机构安装在所述导轨内,通过弹性机构被动适应不同直径的软体机械臂。
12.优选的,每条软体臂由两个气浮支撑夹持,一个软体臂气浮支撑夹持软体机械臂的位置与软体机械臂根部的距离为(3/8
‑
1/2)l,另一个软体臂气浮支撑夹持软体机械臂的位置与软体机械臂根部的距离为(2/3
‑
5/6)l,l为软体机械臂的长度。
13.优选的,所述空间目标模拟器、抓捕者模拟器均通过底部安装的气足,使其处于空间微重力环境;所述气足数量至少四个且相对模拟器质心对称布置。
14.优选的,所述空间目标模拟器上安装六个喷嘴,所述六个喷嘴中四个喷嘴的喷流方向分别沿气浮平台平面前后左右四个方向,另外两个喷嘴的喷流方向相对上述前后或者左右方向能够产生扭矩;通过目标控制器对六个喷嘴的控制实现空间目标模拟器平面两自由度运动、绕平面垂线的旋转运动。
15.优选的,所述抓捕者模拟器和空间目标模拟器上分别设计配重模块,通过配重模块分别改变抓捕者模拟器及目标模拟器质量,以试验获取空间微重力环境下抓捕者与目标的最优质量比。
16.优选的,所述的软体机械臂通过可调节开度的软体臂基座安装在所述抓捕者模拟器上,通过调节软体臂基座的张开角度,适应不同尺寸的空间目标模拟器,所述软体臂基座在抓捕者模拟器上的安装高度相同且安装在同一平面上。
17.优选的,所述目标控制器根据惯性测量单元imu实时反馈值控制六个喷嘴喷气,使所述目标模拟器运动速度达到设定的初始速度,以模拟微重力环境下空间目标消旋前的运动状态;当软体机械臂与空间目标模拟器接触,即消旋过程开始时,目标控制器控制喷嘴停止喷气,以模拟消旋过程中空间目标的运动状态。
18.优选的,所述抓捕控制器通过下述方式实现对空间目标模拟器的控制:
19.(1)抓捕控制器控制软体机械臂末端向目标模拟器轮廓方向运动,薄膜压力传感器实时反馈软体臂抱持力;
20.(2)当薄膜压力传感器反馈的软体机械臂抱持力大于0时,说明软体机械臂已与目标模拟器接触,消旋过程开始;
21.(3)继续控制软体机械臂末端向目标模拟器轮廓方向运动,并实时监测惯性测量单元imu反馈值;当软体臂抱持力到达设定值时,软体机械臂停止运动,保持在当前位置;直到目标模拟器上惯性测量单元imu角速度反馈值小于0.05度/秒且速度反馈值小于0.01米/秒消旋过程结束。
22.本发明与现有技术相比的优点在于:
23.本发明公开了一种多软体臂空间目标消旋地面物理验证系统,设计空间软体臂对空间自旋目标的降维度地面验证技术。它为了解决现有地面验证系统无法实现对软体臂系统的模拟及空间自旋目标的模拟。本发明能够在地面重力环境下模拟空间软体臂对空间自旋目标的消旋捕获,并验证空间多软体臂对自旋目标的消旋控制算法的可行性和有效性。本发明适用于多软体机械臂目标消旋的地面验证。
附图说明
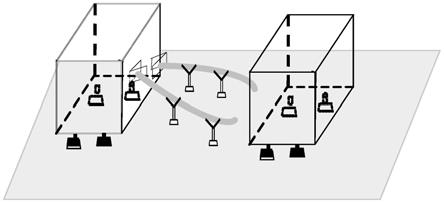
24.图1、空间机器人多软体臂空间目标消旋地面验证系统图。
25.图2、目标模拟器俯视图及喷嘴分布图。
26.图3、可伸缩导轨的软体臂气浮支撑座示意图。
27.图4、可调节开度软体臂基座安装及工作原理示意图。
具体实施方式
28.多软体臂空间目标消旋地面物理验证系统,如图1所示,包括抓捕者模拟器、至少两条软体机械臂、空间目标模拟器、气浮平台及软体臂气浮支撑、惯性测量单元imu、条状柔性薄膜压力传感器、抓捕控制器、目标控制器;
29.所述抓捕者模拟器、空间目标模拟器、软体臂气浮支撑均放置在所述气浮平台上;至少两条软体机械臂(图1中为两条软体机械臂)的根部安装在所述抓捕者模拟器上;所述软体臂气浮支撑用于抵消软体机械臂所受重力以及减小软体机械臂材料特性导致的变形下垂,在地面重力环境下使软体机械臂末端与空间微重力环境下软体机械臂末端运动规律一致;所述抓捕者模拟器、空间目标模拟器均通过喷嘴作用使其处于空间微重力环境;
30.所述惯性测量单元imu用于实时测量空间目标模拟器的位姿、速度、加速度以及实时测量抓捕者模拟器位姿、速度、加速度;条状柔性薄膜压力传感器安装在软体机械臂与空间目标模拟器接触一侧,用于实时测量软体机械臂对空间目标模拟器的抱持力;上述测量信息均交由各自控制器进行存储。
31.所述目标控制器用于根据惯性测量单元imu实时测量结果控制空间目标模拟器降维度模拟空间捕获目标的直线运动及自旋运动;
32.所述抓捕控制器用于根据实时测量的抱持力控制所述软体机械臂抓抱空间目标模拟器,并对空间目标模拟器进行消旋。
33.如图3所示,软体臂气浮支撑包括底座、支撑杆、夹具;所述底座的底部安装气足,通过气足抵消软体机械臂以及软体臂气浮支撑的重力影响,使软体机械臂处于模拟的空间微重力环境;所述底座的上端面通过支撑杆支撑夹具,所述夹具用于夹持软体机械臂,所述支撑杆可沿重力方向伸缩,以适应软体机械臂的不同安装高度。
34.本发明给出一优选实施例中,上述夹具包括夹具底座、多个夹爪;所述夹具底座上平行设置多个导轨,所述夹爪的夹持面为圆弧面,夹爪安装在所述导轨内且相邻夹爪的夹持面的开口方向相反;所述圆弧面的弧度为1/4圆弧。
35.本发明给出的进一步优选实例中,夹具中相邻两个夹爪中一个相对夹具底座固定,另外一个通过弹性机构安装在所述导轨内,通过弹性机构被动适应不同直径的软体机械臂(因不同充气量呈现不同直径的软体臂)。在保证软体臂处于微重力环境的同时,避免对软体臂造成破坏。
36.本发明通过软体臂气浮支撑使软体机械臂在地面处于空间微重力环境下,具体:每条软体臂由两个气浮支撑夹持,一个软体臂气浮支撑夹持软体机械臂的位置与软体机械臂根部的距离为(3/8
‑
1/2)l,另一个软体臂气浮支撑夹持软体机械臂的位置与软体机械臂根部的距离为(2/3
‑
5/6)l,l为软体机械臂的长度。
37.如图1所示,空间目标模拟器、抓捕者模拟器均通过底部安装的气足,使其处于空
间微重力环境;所述气足数量至少四个且相对模拟器质心对称布置。
38.如图2所示,所述空间目标模拟器上安装六个喷嘴,所述六个喷嘴中四个喷嘴的喷流方向分别沿气浮平台平面前后左右四个方向,另外两个喷嘴的喷流方向相对上述前后或者左右方向能够产生扭矩;通过目标控制器对六个喷嘴的控制实现空间目标模拟器平面两自由度运动、绕平面垂线的旋转运动,以降维度模拟空间捕获目标的直线运动及自旋运动。
39.此外,本发明一优选实施例中,抓捕者模拟器和空间目标模拟器上分别设计配重模块,通过配重模块分别改变抓捕者模拟器及目标模拟器质量,进行当抓捕者惯量不同时,通过试验方式根据对多软体机械臂空间目标消旋效果的影响,优选抓捕者及目标质量比。
40.如图4所示,所述的软体机械臂通过可调节开度的软体臂基座安装在所述抓捕者模拟器上,通过调节软体臂基座的张开角度,适应不同尺寸的空间目标模拟器的抓持。当目标模拟器尺寸较大时,增大软体臂基座张开角度;当目标模拟器尺寸较大时,减少软体臂基座张开角度。
41.上述抓捕控制器通过下述方式实现对空间目标模拟器进行控制:
42.(1)抓捕控制器控制软体机械臂向目标模拟器轮廓方向运动,薄膜压力传感器实时反馈软体臂抱持力;
43.(2)当薄膜压力传感器反馈的软体机械臂抱持力大于0时,说明软体机械臂已与目标模拟器接触,消旋过程开始;软体臂抱持住空间目标模拟器进行消旋时,空间目标模拟器上imu可实时测量目标模拟器的角动量消减率。软体臂抱持住空间目标模拟器进行消旋时,抓捕者模拟器上imu可实时测量抓捕者模拟器位姿及速度,根据这些数据分析消旋操作对抓捕者的影响。
44.(3)继续控制软体机械臂向目标模拟器轮廓方向运动,并实时监测惯性测量单元imu反馈值;当软体臂抱持力到达设定值时,软体机械臂停止运动,保持在当前位置;当目标模拟器上惯性测量单元imu角速度反馈值小于0.05度/秒且速度反馈值小于0.01米/秒,消旋过程结束。
45.本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1