自动化炒牛蒡子多级破碎系统及其方法与流程
1.本发明涉及炒牛蒡子破碎的技术领域,特别是自动化炒牛蒡子多级破碎系统及其方法。
背景技术:
2.炒牛蒡子颗粒的外形微鼓起,呈深灰褐色,微有光泽,略具香气,其结构如图1~2所示。炒牛蒡子具有如下药用功效:1、治疗糖尿病、高血压、高血脂、抗癌等作用。2、可降血糖、降血压、血脂、治疗失眠,提高人体免疫力等功效。3、抗菌作用牛蒡全植物含有抗菌成分,其中叶含抗菌成分最多,主要抗金黄色葡萄球菌。4、降血糖作用牛蒡子水提取物能显著而持久地降低大鼠的血糖,能增高碳水化合物耐受量。5、抗衰老和清除氧自由基作用人类生命在正常活动代谢过程中,会产生有害于身体健康,促使细胞衰老的物质——氧自由基。6、能够促使产生脂褐斑色素——老年斑的生成和堆积。7、能抑制癌细胞中磷酸果糖基酶的活性,牛蒡甙元也有抗癌活性,同时牛蒡子甙元还具有抗老年性痴呆作用。
3.炒牛蒡子颗粒收集起来后,需要对其进行破碎,以使其变成小尺寸的块状,进而使其药物成分全部暴露出来。现有生产车间主要采用破碎机对其进行破碎,破碎机包括机箱、动力部分和转盘,动力部分的输出轴上安装有转盘,转盘设置于机箱内,转盘的端面上固设有多个棱柱,机箱的顶部设置有投料口,工作时,打开动力部分,动力部分带动转盘旋转,转盘带动棱柱转动,经位于机箱顶端口处的投料口向机箱内投入一定数量的炒牛蒡子颗粒,高速转动的棱柱的棱角将炒牛蒡子击碎,击碎后变成小块状炒牛蒡子,经一段时间后,关闭动力部分,然后打开机箱侧壁上的端盖,最后将成品块状炒牛蒡子取出,从而最终实现了炒牛蒡子的破碎。然而,这种破碎机虽然能够成功将超牛蒡子破碎,但是车间的操作人员在实际的操作过程中,仍然发现出如下技术缺陷:1、在进行破碎的过程中,棱柱的棱角上几率性的卡有大量的炒牛蒡子外壳,即破碎后的外壳的内腔嵌在棱角上,棱角不能起到破碎的功能,造成需要破碎很长时间,才能将机箱内的炒牛蒡子颗粒破碎完毕,从而降低了炒牛蒡子的破碎效率,进而降低了产品的生产效率,为了解决该问题,需要定时停机,打开端盖以清理掉卡在棱柱上的外壳,但是导致生产不连续,仍然不能很好的解决破碎效率低的问题。2、炒牛蒡子的外壳相当坚硬,即使棱柱转速很快,也有些没有被破碎的炒牛蒡子颗粒,造成取出的产品中还夹带有大量未破碎的炒牛蒡子颗粒,导致后续还需要将其挑选出来,这无疑是增加了操作人员的工作强度,降低了产品的生产效率。
技术实现要素:
4.本发明的目的在于克服现有技术的缺点,提供一种结构紧凑、提高破碎效率、提高产品生产效率、减轻操作人员工作强度、操作简单的自动化炒牛蒡子多级破碎系统及其方法。
5.本发明的目的通过以下技术方案来实现:自动化炒牛蒡子多级破碎系统,它包括螺旋振动装置和设置于螺旋振动装置后侧的破碎装置,所述螺旋振动装置包括螺旋振动盘
和导轨,导轨的首端口焊接于螺旋振动盘的出料口处,出料口与导轨的凹槽连通,导轨的末端口处焊接有挡板,导轨末端口处且位于其两侧壁上均开设有沉槽;
6.所述破碎装置包括机箱、落料筒和抓料机构,落料筒固设于机箱的顶部且与机箱连通,落料筒内固设有隔板,隔板上设置有打孔装置,打孔装置的钻头朝上设置,所述机箱的右端面上焊接有与其连通的套筒,套筒内旋转安装有转盘,转盘的左端面上绕其圆周方向焊接有多个伸入于机箱内的棱柱,套筒内滑动安装有圆盘,圆盘上开设有多个与棱柱相对应的滑孔,滑孔分别对应的滑动安装于棱柱上,所述套筒的右侧依次设置有轴承座、动力单元和支架,轴承座内旋转安装有空心轴,空心轴的左端面焊接于转盘上,动力单元与空心轴之间连接有传动装置,支架上固设有气缸,气缸的活塞杆顺次贯穿空心轴、转盘且旋转安装于圆盘上,气缸的活塞杆与转盘滑动配合;
7.所述抓料机构设置于落料筒的后侧;所述机箱的下方设置有翻料机构,翻料机构包括空压机和设置于机箱下方的进气管,进气管的末端封闭,进气管上且沿其长度方向连接有多个支管,各支管均伸入于机箱内,进气管的首端口与空压机的工作端口连接。
8.所述螺旋振动盘内的轨道的宽度与炒牛蒡子的宽度相等,所述导轨纵向设置,导轨凹槽的宽度大于炒牛蒡子的宽度。
9.所述机箱的横截面为圆形,所述机箱的左端部设置有开口,开口的左侧经螺钉连接有端盖。
10.所述隔板上设置有多个绕打孔装置圆周分布的落料孔。
11.所述气缸、空心轴、圆盘和转盘同轴设置,所述气缸的活塞杆与圆盘之间、转盘与套筒之间均设置有滚珠轴承。
12.所述动力单元包括电机和减速器,电机的输出轴与减速器的输入轴经联轴器连接,所述传动装置包括主动齿轮和从动齿轮,从动齿轮安装于空心轴上,主动齿轮安装于减速器的输出轴上,主动齿轮与从动齿轮啮合。
13.所述打孔装置包括驱动电机、固设于隔板底表面上的防护罩、经转轴旋转安装于隔板中部的中心齿轮和多个行星齿轮,各个行星齿轮均与中心齿轮啮合,驱动电机固设于防护罩内,驱动电机的输出轴与中心齿轮的转轴经联轴器连接,行星齿轮和中心齿轮的转轴的顶部均连接有钻头。
14.所述抓料机构包括进给油缸、升降油缸和固设于落料筒左右侧的支撑板,两个支撑板之间固设有平台,进给油缸纵向设置且固设于平台的顶表面上,进给油缸活塞杆的作用端上固设有l板,升降油缸垂向设置且固设于l板的水平板上,升降油缸活塞杆的作用端上固设有开口朝下的槽钢,槽钢的左右侧壁上均固设有夹持油缸,夹持油缸活塞杆的作用端上固设有夹持块,夹持块设置于槽钢的槽体中,夹持块的内端面上开设有弧形槽,两个夹持块的弧形槽相对立设置。
15.它还包括控制器,所述控制器与夹持油缸的电磁阀、升降油缸的电池阀、进给油缸的电池阀、驱动电机、电机、螺旋振动盘、空压机和气缸的电磁阀经信号线电连接。
16.所述系统自动化多级破碎炒牛蒡子的方法,它包括以下步骤:
17.s1、操作人员向螺旋振动盘内倾倒炒牛蒡子颗粒,控制螺旋振动盘启动,炒牛蒡子颗粒在震动下,沿着螺旋振动盘内的轨道朝出料口方向运动,炒牛蒡子颗粒从出料口流出并进入到导轨的凹槽内,各个炒牛蒡子颗粒纵向整齐的排列在导轨内,最末端的炒牛蒡子
颗粒a被挡板限制住;
18.s2、炒牛蒡子颗粒的抓取,其具体操作步骤为:
19.s21、控制进给油缸的活塞杆伸出,活塞杆带动l板向前运动,l板带动升降油缸向前运动,升降油缸带动槽钢向前运动,当活塞杆完全伸出后,两个夹持块分别位于两个沉槽的正上方;
20.s22、控制升降油缸的活塞杆向下伸出,活塞杆带动槽钢向下运动,槽钢带动两个夹持块同步向下运动,当升降油缸的活塞杆完全伸出后,两个夹持块分别进入到两个沉槽内,到位后,控制两个夹持油缸的活塞杆伸出,活塞杆带动夹持块朝向炒牛蒡子颗粒a运动,炒牛蒡子颗粒a被夹持在两个夹持块的弧形槽之间,从而最终实现了炒牛蒡子颗粒a的抓取;
21.s3、炒牛蒡子颗粒的打孔,其具体操作步骤为:
22.s31、控制升降油缸的活塞杆向上缩回,升降油缸带动槽钢和被夹持的炒牛蒡子颗粒a向上运动,炒牛蒡子颗粒a从导轨内取出,取出后,下一个炒牛蒡子颗粒被挡板限制住,当升降油缸的活塞杆完全缩回后,控制进给油缸的活塞杆向后缩回,活塞杆带动l板向后运动,进而带动升降油缸和炒牛蒡子颗粒a向后运动,当炒牛蒡子颗粒a运动到钻头时,控制进给油缸关闭,此时炒牛蒡子颗粒a进入到打孔工位;
23.s32、控制驱动电机启动,驱动电机带动中心齿轮转动,中心齿轮带动各个行星齿轮转动,行星齿轮带动钻头旋转;
24.s33、控制升降油缸的活塞杆向下伸出,升降油缸带动炒牛蒡子颗粒a朝向钻头方向运动,钻头做运动,升降油缸做进给运动,钻头即可在炒牛蒡子颗粒a的底表面上钻出多个孔眼,从而最终实现了炒牛蒡子颗粒的打孔;
25.s4、炒牛蒡子颗粒的预破碎,控制两个夹持油缸的活塞杆同时在伸出一端距离,夹持油缸驱动夹持块做相对运动,两个夹持块给被夹持的炒牛蒡子颗粒a同时施加压力,在挤压下,在孔眼的周围处出现出大量裂缝,从而实现了炒牛蒡子颗粒的预破碎;
26.s5、炒牛蒡子颗粒的二级破碎,其具体操作步骤为:
27.s51、控制升降油缸的活塞杆向上缩回,缩回后,控制两个夹持油缸的活塞杆缩回,带孔眼、预破碎后的炒牛蒡子颗粒a与夹持块分离,分离后带孔眼、预破碎后的炒牛蒡子颗粒a从槽钢上掉落下来,并顺次穿过落料筒、落料孔最后进入到机箱内;掉落下来后,控制进给油缸的活塞杆完全缩回;
28.s52、如此重复步骤s2~s51的操作,即可将多个带孔眼、预破碎后的炒牛蒡子颗粒投放到机箱内;
29.s53、控制空压机启动,空压机向进气管内鼓入压力气体,压力气体经支管进入到机箱内,压力气体将机箱内的炒牛蒡子颗粒向上吹起;
30.s54、控制电机启动,电机的转矩经减速器减速后传递给主动齿轮,主动齿轮带动从动齿轮转动,从动齿轮驱动空心轴绕着轴承座的轴线转动,空心轴带动转盘转动,转盘带动棱柱绕着转盘的中心旋转,棱柱驱动圆盘同步旋转,转动的棱柱的棱角将向上吹起的炒牛蒡子颗粒破碎成块状,以开始破碎牛蒡子颗粒;
31.s55、控制气缸的活塞杆向左伸出,活塞杆带动圆盘向左运动,圆盘在向左运动的过程中,圆盘将卡在棱柱棱角上的外壳向左推,以将外壳从棱柱上推下,从而实现了棱柱的
清理;
32.s56、经一段时间的破碎后,即可在机箱内得到破碎后的产品;
33.s6、关闭驱动电机和电机,打开端盖,以将产品从机箱内取出来使用。
34.本发明具有以下优点:
35.1、本发明的套筒的右侧依次设置有轴承座、动力单元和支架,轴承座内旋转安装有空心轴,空心轴的左端面焊接于转盘上,动力单元与空心轴之间连接有传动装置,支架上固设有气缸,气缸的活塞杆顺次贯穿空心轴、转盘且旋转安装于圆盘上,气缸的活塞杆与转盘滑动配合,控制气缸的活塞杆向左伸出,活塞杆带动圆盘向左运动,圆盘在向左运动的过程中,圆盘将卡在棱柱棱角上的外壳向左推,以将外壳从棱柱上推下,从而实现了棱柱的清理;因此,确保了棱柱的棱角处于锋利状态,具有破碎功能,从而实现了在短时间内将机箱内所有的炒牛蒡子颗粒全部破碎完毕,相比传统的破碎机破碎,极大的提高了炒牛蒡子的破碎效率,进而极大的提高了产品的生产效率。
36.2、本发明的破碎装置包括机箱、落料筒和抓料机构,落料筒固设于机箱的顶部且与机箱连通,落料筒内固设有隔板,隔板上设置有打孔装置,打孔装置的钻头朝上设置,所述机箱的右端面上焊接有与其连通的套筒,套筒内旋转安装有转盘,转盘的左端面上绕其圆周方向焊接有多个伸入于机箱内的棱柱,在棱柱破碎炒牛蒡子颗粒的过程中,由于被破碎的炒牛蒡子颗粒上带有多个孔眼,且孔眼的周围处预先形成有大量的裂缝,因此极大的降低了炒牛蒡子颗粒的硬度,确保了棱柱能够将机箱内所有的炒牛蒡子颗粒全部破碎掉,避免了产品中还夹带有未破碎的炒牛蒡子颗粒,进而极大的提高了产品的质量,此外,无需人工后续进行筛选没破碎的炒牛蒡子颗粒,相比传统的破碎方式,极大的减轻了操作人员的工作强度。
37.3、本发明的螺旋振动装置包括螺旋振动盘和导轨,导轨的首端口焊接于螺旋振动盘的出料口处,出料口与导轨的凹槽连通,导轨的末端口处焊接有挡板,导轨末端口处且位于其两侧壁上均开设有沉槽,抓料机构包括进给油缸、升降油缸和固设于落料筒左右侧的支撑板,两个支撑板之间固设有平台,进给油缸纵向设置且固设于平台的顶表面上,进给油缸活塞杆的作用端上固设有l板,升降油缸垂向设置且固设于l板的水平板上,升降油缸活塞杆的作用端上固设有开口朝下的槽钢,槽钢的左右侧壁上均固设有夹持油缸,夹持油缸活塞杆的作用端上固设有夹持块,夹持块设置于槽钢的槽体中,夹持块的内端面上开设有弧形槽,两个夹持块的弧形槽相对立设置,通过螺旋振动装置和抓料装置可实现自动将炒牛蒡子颗粒输送到机箱内,实现了自动上料,具有自动化程度高的特点。
附图说明
38.图1为炒牛蒡子的结构示意图;
39.图2为图1的俯视图;
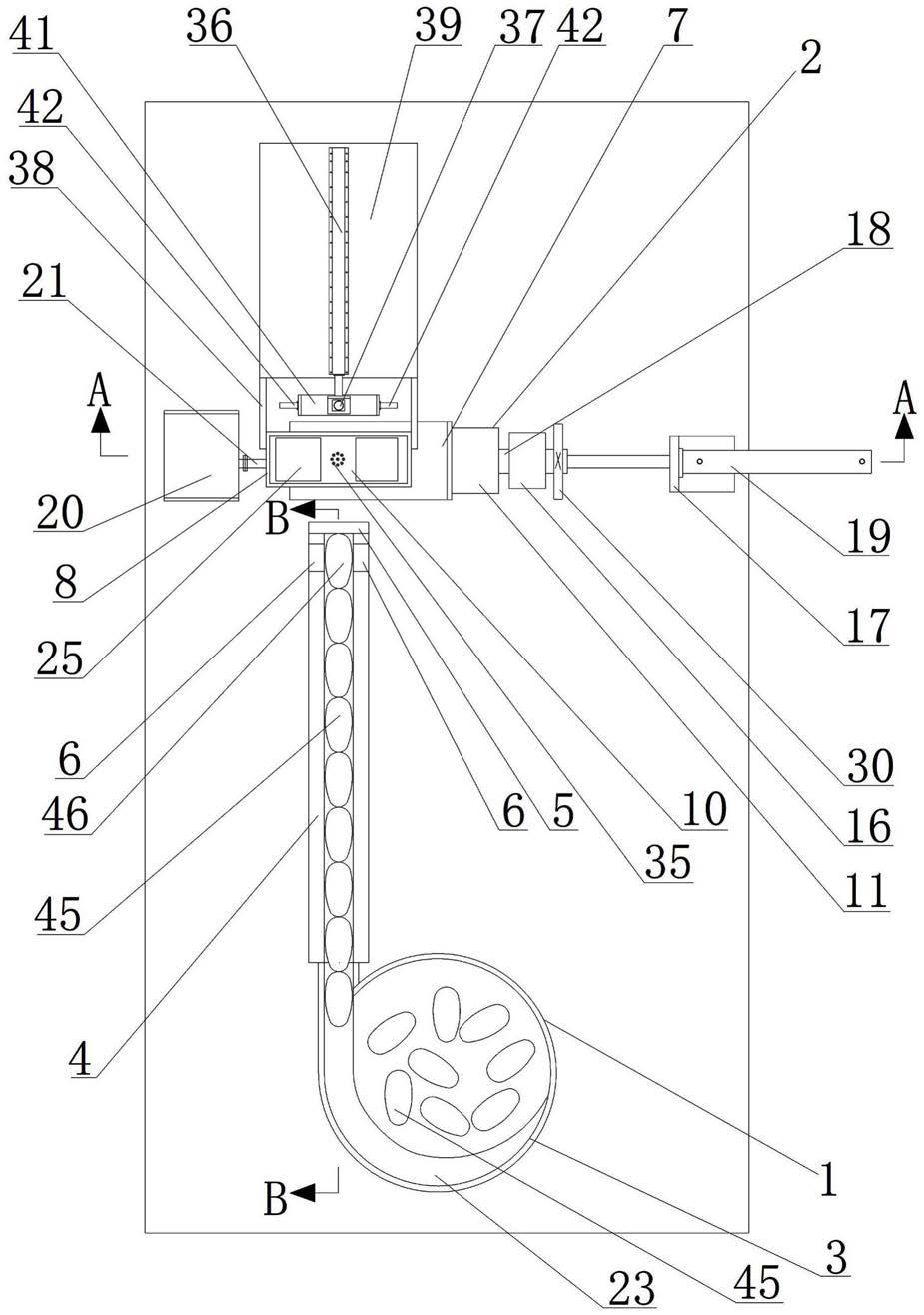
40.图3为本发明的结构示意图;
41.图4为图3的a
‑
a剖视图;
42.图5为图3的b
‑
b剖视图;
43.图6为图4的i部局部放大示意图;
44.图7为图6的俯视图;
45.图8为图4的c
‑
c剖视图;
46.图9为圆盘的结构示意图;
47.图10为棱柱的结构示意图;
48.图11为棱柱的截面示意图;
49.图12为支撑板的结构示意图;
50.图13为本发明处于抓料工位的示意图;
51.图14为图13的d
‑
d剖视图;
52.图15为本发明处于打孔工位的示意图
53.图16为图15的e
‑
e剖视图;
54.图17为图16的f
‑
f剖视图;
55.图中,1
‑
螺旋振动装置,2
‑
破碎装置,3螺旋振动盘
‑
,4
‑
导轨,5
‑
挡板,6
‑
沉槽,7
‑
机箱,8
‑
落料筒,9
‑
端盖,10
‑
隔板,11
‑
套筒,12
‑
转盘,13
‑
棱柱,14
‑
圆盘,15
‑
滑孔,16
‑
轴承座,17
‑
支架,18
‑
空心轴,19
‑
气缸,20
‑
空压机,21
‑
进气管,22
‑
支管,23
‑
轨道,24
‑
开口,25
‑
落料孔,26
‑
滚珠轴承,27
‑
电机,28
‑
减速器,29
‑
主动齿轮,30
‑
从动齿轮,31
‑
驱动电机,32
‑
防护罩,33
‑
中心齿轮,34
‑
行星齿轮,35
‑
钻头,36
‑
进给油缸,37
‑
升降油缸,38
‑
支撑板,39
‑
平台,40
‑
l板,41
‑
槽钢,42
‑
夹持油缸,43
‑
夹持块,44
‑
弧形槽,45
‑
炒牛蒡子颗粒,46
‑
炒牛蒡子颗粒a。
具体实施方式
56.下面结合附图对本发明做进一步的描述,本发明的保护范围不局限于以下所述:
57.如图2~12所示,自动化炒牛蒡子多级破碎系统,它包括螺旋振动装置1和设置于螺旋振动装置1后侧的破碎装置2,所述螺旋振动装置1包括螺旋振动盘3和导轨4,导轨4的首端口焊接于螺旋振动盘3的出料口处,出料口与导轨4的凹槽连通,导轨4的末端口处焊接有挡板5,导轨4末端口处且位于其两侧壁上均开设有沉槽6。所述螺旋振动盘3内的轨道23的宽度与炒牛蒡子的宽度相等,所述导轨4纵向设置,导轨4凹槽的宽度大于炒牛蒡子的宽度。
58.所述破碎装置2包括机箱7、落料筒8和抓料机构,落料筒8固设于机箱7的顶部且与机箱7连通,落料筒8内固设有隔板10,隔板10上设置有打孔装置,打孔装置的钻头35朝上设置,所述机箱7的右端面上焊接有与其连通的套筒11,套筒11内旋转安装有转盘12,转盘12的左端面上绕其圆周方向焊接有多个伸入于机箱7内的棱柱13,套筒11内滑动安装有圆盘14,圆盘14上开设有多个与棱柱13相对应的滑孔15,滑孔15分别对应的滑动安装于棱柱13上,所述套筒11的右侧依次设置有轴承座16、动力单元和支架17,轴承座16内旋转安装有空心轴18,空心轴18的左端面焊接于转盘12上,动力单元与空心轴18之间连接有传动装置,支架17上固设有气缸19,气缸19的活塞杆顺次贯穿空心轴18、转盘12且旋转安装于圆盘14上,气缸19的活塞杆与转盘12滑动配合;所述抓料机构设置于落料筒8的后侧;所述机箱7的下方设置有翻料机构,翻料机构包括空压机20和设置于机箱7下方的进气管21,进气管21的末端封闭,进气管21上且沿其长度方向连接有多个支管22,各支管22均伸入于机箱7内,进气管21的首端口与空压机20的工作端口连接。所述动力单元包括电机27和减速器28,电机27的输出轴与减速器28的输入轴经联轴器连接,所述传动装置包括主动齿轮29和从动齿轮
30,从动齿轮30安装于空心轴18上,主动齿轮29安装于减速器28的输出轴上,主动齿轮29与从动齿轮30啮合。
59.所述机箱7的横截面为圆形,所述机箱7的左端部设置有开口24,开口24的左侧经螺钉连接有端盖9。所述隔板10上设置有多个绕打孔装置圆周分布的落料孔25。所述气缸19、空心轴18、圆盘14和转盘12同轴设置,所述气缸19的活塞杆与圆盘14之间、转盘12与套筒11之间均设置有滚珠轴承26。
60.所述打孔装置包括驱动电机31、固设于隔板10底表面上的防护罩32、经转轴旋转安装于隔板10中部的中心齿轮33和多个行星齿轮34,各个行星齿轮34均与中心齿轮33啮合,驱动电机31固设于防护罩32内,驱动电机31的输出轴与中心齿轮33的转轴经联轴器连接,行星齿轮34和中心齿轮33的转轴的顶部均连接有钻头35。
61.所述抓料机构包括进给油缸36、升降油缸37和固设于落料筒8左右侧的支撑板38,两个支撑板38之间固设有平台39,进给油缸36纵向设置且固设于平台39的顶表面上,进给油缸36活塞杆的作用端上固设有l板40,升降油缸37垂向设置且固设于l板40的水平板上,升降油缸37活塞杆的作用端上固设有开口朝下的槽钢41,槽钢41的左右侧壁上均固设有夹持油缸42,夹持油缸42活塞杆的作用端上固设有夹持块43,夹持块43设置于槽钢41的槽体中,夹持块43的内端面上开设有弧形槽44,两个夹持块43的弧形槽44相对立设置。
62.它还包括控制器,所述控制器与夹持油缸42的电磁阀、升降油缸37的电池阀、进给油缸36的电池阀、驱动电机31、电机27、螺旋振动盘3、空压机20和气缸19的电磁阀经信号线电连接,通过控制器能够控制对应的部件开或启,方便了工厂内操作人员的操作,具有自动化程度高的特点。
63.所述系统自动化多级破碎炒牛蒡子的方法,它包括以下步骤:
64.s1、操作人员向螺旋振动盘3内倾倒炒牛蒡子颗粒45,控制螺旋振动盘3启动,炒牛蒡子颗粒在震动下,沿着螺旋振动盘3内的轨道23朝出料口方向运动,炒牛蒡子颗粒45从出料口流出并进入到导轨4的凹槽内,各个炒牛蒡子颗粒45纵向整齐的排列在导轨4内,最末端的炒牛蒡子颗粒a46被挡板5限制住;
65.s2、炒牛蒡子颗粒的抓取,其具体操作步骤为:
66.s21、控制进给油缸36的活塞杆伸出,活塞杆带动l板40向前运动,l板40带动升降油缸37向前运动,升降油缸37带动槽钢41向前运动,当活塞杆完全伸出后,两个夹持块43分别位于两个沉槽6的正上方;
67.s22、控制升降油缸37的活塞杆向下伸出,活塞杆带动槽钢41向下运动,槽钢41带动两个夹持块43同步向下运动,当升降油缸37的活塞杆完全伸出后,两个夹持块43分别进入到两个沉槽6内如图13~14所示,到位后,控制两个夹持油缸42的活塞杆伸出,活塞杆带动夹持块43朝向炒牛蒡子颗粒a46运动,炒牛蒡子颗粒a46被夹持在两个夹持块43的弧形槽44之间,从而最终实现了炒牛蒡子颗粒a的抓取;
68.s3、炒牛蒡子颗粒的打孔,其具体操作步骤为:
69.s31、控制升降油缸37的活塞杆向上缩回,升降油缸37带动槽钢41和被夹持的炒牛蒡子颗粒a向上运动,炒牛蒡子颗粒a46从导轨4内取出,取出后,下一个炒牛蒡子颗粒被挡板5限制住,当升降油缸37的活塞杆完全缩回后,控制进给油缸36的活塞杆向后缩回,活塞杆带动l板40向后运动,进而带动升降油缸37和炒牛蒡子颗粒a46向后运动,当炒牛蒡子颗
粒a46运动到钻头35时,控制进给油缸36关闭,此时炒牛蒡子颗粒a46进入到打孔工位如图15~17所示;
70.s32、控制驱动电机31启动,驱动电机31带动中心齿轮33转动,中心齿轮33带动各个行星齿轮34转动,行星齿轮34带动钻头35旋转;
71.s33、控制升降油缸37的活塞杆向下伸出,升降油缸37带动炒牛蒡子颗粒a46朝向钻头35方向运动,钻头35做运动,升降油缸37做进给运动,钻头35即可在炒牛蒡子颗粒a46的底表面上钻出多个孔眼,从而最终实现了炒牛蒡子颗粒的打孔;
72.s4、炒牛蒡子颗粒的预破碎,控制两个夹持油缸42的活塞杆同时在伸出一端距离,夹持油缸42驱动夹持块43做相对运动,两个夹持块43给被夹持的炒牛蒡子颗粒a46同时施加压力,在挤压下,在孔眼的周围处出现出大量裂缝,从而实现了炒牛蒡子颗粒的预破碎;
73.s5、炒牛蒡子颗粒的二级破碎,其具体操作步骤为:
74.s51、控制升降油缸37的活塞杆向上缩回,缩回后,控制两个夹持油缸42的活塞杆缩回,带孔眼、预破碎后的炒牛蒡子颗粒a46与夹持块43分离,分离后带孔眼、预破碎后的炒牛蒡子颗粒a46从槽钢41上掉落下来,并顺次穿过落料筒8、落料孔25最后进入到机箱7内;掉落下来后,控制进给油缸36的活塞杆完全缩回;
75.s52、如此重复步骤s2~s51的操作,即可将多个带孔眼、预破碎后的炒牛蒡子颗粒投放到机箱7内;
76.s53、控制空压机20启动,空压机20向进气管21内鼓入压力气体,压力气体经支管22进入到机箱7内,压力气体将机箱7内的炒牛蒡子颗粒向上吹起;
77.s54、控制电机27启动,电机27的转矩经减速器28减速后传递给主动齿轮29,主动齿轮29带动从动齿轮30转动,从动齿轮30驱动空心轴18绕着轴承座16的轴线转动,空心轴18带动转盘12转动,转盘12带动棱柱13绕着转盘12的中心旋转,棱柱13驱动圆盘14同步旋转,转动的棱柱13的棱角将向上吹起的炒牛蒡子颗粒破碎成块状,以开始破碎牛蒡子颗粒;
78.s55、控制气缸19的活塞杆向左伸出,活塞杆带动圆盘14向左运动,圆盘14在向左运动的过程中,圆盘14将卡在棱柱13棱角上的外壳向左推,以将外壳从棱柱13上推下,从而实现了棱柱的清理;因此,确保了棱柱13的棱角处于锋利状态,具有破碎功能,从而实现了在短时间内将机箱7内所有的炒牛蒡子颗粒全部破碎完毕,相比传统的破碎机破碎,极大的提高了炒牛蒡子的破碎效率,进而极大的提高了产品的生产效率。
79.s56、经一段时间的破碎后,即可在机箱7内得到破碎后的产品;其中,在棱柱13破碎炒牛蒡子颗粒的过程中,由于被破碎的炒牛蒡子颗粒上带有多个孔眼,且孔眼的周围处预先形成有大量的裂缝,因此极大的降低了炒牛蒡子颗粒的硬度,确保了棱柱13能够将机箱7内所有的炒牛蒡子颗粒全部破碎掉,避免了产品中还夹带有未破碎的炒牛蒡子颗粒,进而极大的提高了产品的质量,此外,无需人工后续进行筛选没破碎的炒牛蒡子颗粒,相比传统的破碎方式,极大的减轻了操作人员的工作强度。
80.s6、关闭驱动电机31和电机27,打开端盖9,以将产品从机箱7内取出来使用。
81.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的
保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1