一种葡萄采摘用智能机械手的制作方法
1.本发明涉及葡萄采摘技术领域,尤其涉及一种葡萄采摘用智能机械手。
背景技术:
2.葡萄为葡萄科葡萄属木质藤本植物,小枝圆柱形,有纵棱纹,无毛或被稀疏柔毛,叶卵圆形,圆锥花序密集或疏散,基部分枝发达,果实球形或椭圆形,花期4
‑
5月,果期8
‑
9月。
3.现有的葡萄园在葡萄成熟进行采摘的过程中通过人工或者机械两种方式进行采摘葡萄,现有的机械手在采摘葡萄时,通过剪断葡萄的果茎后,再通过机械臂将剪切下的一串葡萄放置在收集框内,耗时较长,增加了采摘一串葡萄的工作效率,同时剪切的葡萄在移动过程中悬空受到重力的影响出现掉落的现象,同时现有的机械臂只能够对于位于的葡萄架两侧上的葡萄进行采摘,无法对葡萄架上方的葡萄进行采摘,使用范围受限,造成实用性降低。
技术实现要素:
4.基于现有的机械手在采摘葡萄时,耗时较长,剪切的葡萄出现掉落的现象,无法对葡萄架上方的葡萄进行采摘,使用范围受限,造成实用性降低的技术问题,本发明提出了一种葡萄采摘用智能机械手。
5.本发明提出的一种葡萄采摘用智能机械手,包括移动小车,还包括升降装置、采摘机械手和收集机构,所述升降装置位于所述移动小车的车厢内底壁并根据葡萄的位置调节所述采摘机械手的位置;所述采摘机械手位于所述升降装置的上表面并对葡萄藤上成熟的葡萄进行采摘;所述收集机构位于所述升降装置的外侧面并对所述采摘机械手采摘的葡萄进行收集。
6.优选地,所述升降装置包括升降液压缸,多个所述升降液压缸的下表面呈环形阵列分布固定安装在所述移动小车的内底壁,所述升降液压缸的活塞杆固定安装有联动板,所述联动板的下表面两侧均固定安装有限位管套,所述限位管套的内壁滑动插接有限位杆,所述限位杆的上端贯穿所述联动板的上表面后固定安装有支撑板;通过上述技术方案,通过限位杆在限位管套内滑动,能够对支撑板进行限位,防止支撑板在升降的过程中发生其他晃动与偏转,对支撑板起到限位作用。
7.优选地,所述移动小车的车厢内底壁两侧固定安装有连接板,两个所述连接板的两侧均通过销轴铰接有剪刀架部件,两个所述剪刀架部件的中间端通过销轴分别铰接在所述联动板的外侧面,两个所述剪刀架部件的另一端通过销轴分别铰接在所述支撑板的下表面两侧;通过上述技术方案,其中剪刀架部件是由铰接在移动的连杆构成,形成剪刀形状,剪刀架部件的中间铰接在一起的连杆铰接点铰接在联动板的外侧面,联动板在随着升降液
压缸升降的同时,能够带动剪刀架部件进行展开和收缩,剪刀架部件上端两端通过销轴铰接在支撑板的下表面,从而剪刀架部件能够带动支撑板进行移动,剪刀架部件的展开和收缩能够带动支撑板进行升降,增加了支撑板移动的行程,同时能够支撑支撑板。
8.优选地,所述采摘机械手包括机械臂、摄像头、采摘机构、固定机构和支撑机构,所述机械臂带动所述采摘机构根据采摘葡萄的位置进行相应的移动,所述采摘机构对所述固定机构固定的葡萄进行剪断葡萄藤蔓,所述固定机构固定葡萄藤上需要采摘的葡萄同时防止采摘下的葡萄发生移动,所述支撑机构能够收集采摘下的葡萄进行支撑;优选地,多个所述机械臂的下表面矩形阵列固定安装在所述支撑板的上表面,多个所述摄像头的下表面固定安装在所述机械臂的一端外侧面;通过上述技术方案,机械臂为五轴关节机械臂,关节处设置有伺服电机,五个伺服电机直接通过谐波减速器、同步带轮等驱动五个关节轴的旋转,能够实现采摘不同位置的葡萄,定位精准,通过摄像头捕捉葡萄的位置,摄像头通过颜色识别模块识别葡萄的成熟度,在葡萄成熟度达标时控制机械臂进行移动,使得固定机构能够固定需要采摘葡萄连接的果茎处,采摘机构进行剪断果茎。
9.优选地,所述采摘机构包括控制机壳,所述控制机壳的上表面固定安装在所述机械臂的一端,所述控制机壳的内底壁固定安装有采摘电机,所述采摘电机的输出轴固定安装有转盘,所述控制机壳的槽口内壁固定安装有限位槽体,所述限位槽体的内壁滑动插接有滑块,所述滑块的上表面通过销轴铰接有剪刀组件,所述剪刀组件的一端上表面固定连接有复位弹簧,所述复位弹簧的另一端固定连接在所述剪刀组件的另一端上表面,所述转盘的上表面中心处固定安装有挤压块,所述挤压块的两端分别与所述剪刀组件的两端滑动连接;通过上述技术方案,通过采摘电机带动转盘进行转动,转盘带动挤压块进行转动,挤压块是由连接杆和两个凸块构成,两个凸块呈上下对称固定在连接杆上,剪刀组件包括两个通过销轴铰接在一起的连杆,一个连杆的一端固定连接有静刃,另一端连杆的一端固定连接有动刃,通过动刃与静刃能够剪切葡萄果茎,挤压块上的两个凸块分别与剪刀组件上的两个连杆另一端进行滑动连接,达到铰接在一起的连杆能够进行偏转,使得动刃与静刃能够相对偏转进行剪切工作,类似剪刀的工作原理,两个连杆呈上下分布进行铰接,与呈上下分布的凸块分别滑动连接,使得上方的凸块能够在转动过程中将与之滑动连接的连杆以铰接点发生偏转,下方的凸块能够在转动过程中将与之滑动连接的连杆以铰接点发生偏转,下方凸块不与上方连杆发生滑动连接,限位槽体能够进行限位,使得剪刀组件能够进行水平移动。
10.优选地,所述转盘的上表面开设有滑槽,所述滑块的外表面固定安装有限位连板,所述限位连板的一端内壁滑动连接在所述挤压块的一端外表面,所述限位连板的下表面通过连接柱滑动连接在所述滑槽的内壁;通过上述技术方案,在转盘进行转动时,限位连板的下表面固定连接的连接柱能够随着滑槽的轨迹进行滑动,从而能够推动限位连板带动滑块在限位槽体的内壁进行水平移动,带动剪刀组件进行向前移动的同时进行剪切工作,收回的同时能够松开葡萄果茎,便于固定机构带动葡萄进行移动。
11.优选地,所述固定机构包括固定电机,所述固定电机的外表面固定安装在所述控
制机壳的下表面,所述固定电机的输出轴固定安装有托盘,所述托盘的上表面通过凹槽环形阵列固定安装有固定液压缸,所述固定液压缸的活塞杆一端固定安装有气动手指,所述气动手指的机爪相对面固定安装有压力传感器,所述气动手指的机爪相对面固定安装有橡胶垫;通过上述技术方案,固定电机能够带动托盘进行转动,能够使得一个气动手指夹持葡萄后进行转动,使得另一个气动手指位于剪刀组件的下方,捕捉成熟的葡萄后进行第二次采摘,减少现有的采摘机械手采摘一串葡萄后机械臂需要带动采摘下来的葡萄返回输送至收集框内所产生的时间,才能够进行第二次采摘,气动手指是利用压缩空气作为动力,用来夹取或抓取工件的执行装置,通过气动手指中机爪进行相对移动,夹持葡萄的果茎后,通过气动手指机爪上的压力传感器检测受到的压力后,在压力达到设定的阈值时,停止气动手指中机爪的移动,防止造成葡萄果茎断裂,造成葡萄掉落,橡胶垫能够减小对葡萄果茎外表面造成的伤害。
12.优选地,所述支撑机构包括支撑架,所述支撑架的下表面通过通孔呈环形阵列分布固定安装在所述托盘的上表面,所述支撑架的外表面固定安装有硅胶槽体,所述硅胶槽体的外侧面与所述气动手指的外表面滑动连接,所述托盘的下表面呈环形阵列分布固定安装有支撑电机,所述托盘的下表面通过销轴铰接有盖板,所述盖板呈环形阵列分布在所述托盘的下表面,所述支撑电机的输出轴与所述盖板一侧的销轴一端固定连接;通过上述技术方案,硅胶槽体呈管状,一侧外表面开设有凹槽,能够便于启动手指的下降,启动手指能够将剪切后的葡萄放置在硅胶槽体内,通过闭合的盖板进行支撑,从而能够使得机械臂在调整采摘机构的位置时,采摘下的葡萄能够在移动过程中不会发生大幅度的晃动,硅胶槽体是由硅胶材料构成,减小葡萄在机械臂移动的调节的过程中晃动产生的伤害,多个硅胶槽体能够防止多串葡萄,在多个硅胶槽体内都放置有葡萄后,机械臂带动托盘回到收集框内,通过支撑电机驱动盖板发生偏转,启动手指松开葡萄果茎,葡萄能够落入收集框内,盖板位于托盘开设通孔的下方,支撑电机可同时进行驱动,或者单独进行驱动,同时驱动打开盖板能够将多串葡萄一起落入收集框,在对葡萄的放置形状有要求时,可通过逐一开启盖板,能够调整葡萄位于手收集框内的位置,支撑电机为带刹车的电机,在未通电时输出轴无法转动。
13.优选地,所述收集机构包括限位架,两个所述限位架的外侧面固定安装在所述支撑板的外侧面,所述限位架的上表面两端通过凹槽固定安装有称重传感器,所述限位架的上表面设置有收集框;通过上述技术方案,收集框位于称重传感器的上方,在收集框内的葡萄达到设定的重量时,提醒工作人员进行更换收集框,也可通过其他机械手进行更换收集框,减少人工的投入,实现自动化采摘葡萄。
14.本发明中的有益效果为:1、通过设置升降装置,能够在需要对葡萄架上方的葡萄进行采摘时,能够升高采摘机械手的高度,便于采摘机械手进行采摘,通过升降液压缸推动联动板进行移动,两侧的剪刀架部件能够随着联动板的上升进行张开后推动支撑架上升,从而能够实现调节采摘机械手的高度,解决了现有的机械手无法对葡萄架上方的葡萄进行采摘,使用范围受限,造成实用性降低的技术问题。
15.2、通过设置固定机构,能够先将需要采摘的葡萄进行固定后进行剪切,防止采摘后葡萄发生掉落,通过固定电机带动托盘进行旋转,使得托盘上的固定液压缸带动启动手指位于剪刀组件的下方后,启动手指夹取葡萄的果茎后,便于上方的葡萄果茎进行剪切,气动手指上的压力传感器能够检测夹持葡萄果茎的压力,防止压力过大造成葡萄果茎出现断裂,同时橡胶垫能够增大摩擦力,防止葡萄受到自生的重力向下坠落,同时橡胶垫能够减小气动手指中机爪对葡萄果茎造成伤害,从而能够将葡萄固定住,减小对葡萄掉落的情况,解决了现有的机械手在采摘葡萄时,耗时较长,剪切的葡萄出现掉落的现象的技术问题。
16.3、通过设置支撑机构,能够支撑多串剪切后的葡萄,减少机械臂返回放置剪切葡萄的时间,气动手指在固定液压缸的活塞杆回缩时能够插接进硅胶槽体,气动手指带动剪切下的葡萄位于硅胶槽体内,通过关闭的盖板进行支撑葡萄,在一个硅胶槽体内放置葡萄后,固定电机带动托盘进行转动,使得没有夹持葡萄的启动手指位于剪刀组件的下方进行第二次采摘葡萄,在多个硅胶槽体内都放置葡萄后,机械臂在带动托盘移动至收集框的上方,支撑电机驱动盖板发生偏转,便于多串葡萄落入收集框内,从而增加了采摘葡萄的工作效率,减少机械臂往返的次数,解决了现有的机械手在采摘葡萄时,机械手需要采摘一串葡萄后就需要返回将葡萄放置在收集框内,增加了工作效率的技术问题。
附图说明
17.图1为本发明提出的一种葡萄采摘用智能机械手的示意图;图2为本发明提出的一种葡萄采摘用智能机械手的升降液压缸结构的立体图;图3为本发明提出的一种葡萄采摘用智能机械手的剪刀架部件结构的立体图;图4为本发明提出的一种葡萄采摘用智能机械手的联动板结构的立体图;图5为本发明提出的一种葡萄采摘用智能机械手的采摘机械手结构的立体图;图6为本发明提出的一种葡萄采摘用智能机械手的托盘结构的立体图;图7为本发明提出的一种葡萄采摘用智能机械手的剪刀组件结构的立体图;图8为本发明提出的一种葡萄采摘用智能机械手的转盘结构的立体图;图9为本发明提出的一种葡萄采摘用智能机械手的固定电机结构的立体图;图10为本发明提出的一种葡萄采摘用智能机械手的硅胶槽体结构的立体图;图11为本发明提出的一种葡萄采摘用智能机械手的气动手指结构的立体图;图12为本发明提出的一种葡萄采摘用智能机械手的支撑电机结构的立体图;图13为本发明提出的一种葡萄采摘用智能机械手的限位架结构的立体图。
18.图中:1、移动小车;2、升降液压缸;21、联动板;22、限位管套;23、限位杆;24、支撑板;25、连接板;26、剪刀架部件;3、采摘机械手;31、机械臂;32、摄像头;33、控制机壳;3301、采摘电机;3302、转盘;3303、限位槽体;3304、滑块;3305、剪刀组件;3306、复位弹簧;3307、挤压块;3308、滑槽;3309、限位连板;34、固定电机;3401、托盘;3402、固定液压缸;3403、气动手指;3404、压力传感器;3405、橡胶垫;35、支撑架;3501、硅胶槽体;3502、支撑电机;3503、盖板;4、限位架;41、称重传感器;42、收集框。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
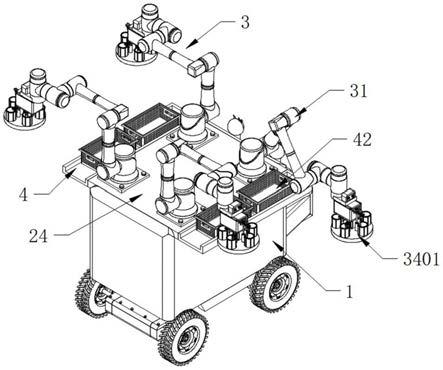
20.参照图1
‑
13,一种葡萄采摘用智能机械手,包括移动小车1,还包括升降装置、采摘机械手3和收集机构。
21.如图2
‑
4所示,升降装置位于移动小车1的车厢内底壁并根据葡萄的位置调节采摘机械手3的位置;升降装置,安装在移动小车1的车厢内底壁位置上,为了根据采摘葡萄的位置进行调节采摘机械手3的位置,在移动小车1的车厢内底壁固定安装升降液压缸2,升降液压缸2呈环形阵列分布在移动小车1的车厢内底壁,然后升降液压缸2的活塞杆上表面固定安装联动板21,为了进行限位,在联动板21的下表面两侧均固定安装限位管套22,然后限位管套22的内壁滑动插接限位杆23,为了支撑采摘机械手3,在限位杆23的上端贯穿联动板21的上表面后固定安装支撑板24,限位杆23对支撑杆起到限位作用;进一步地,为了增加支撑板24升降的行程,在移动小车1的车厢内底壁两侧固定安装连接板25,然后两个连接板25的两侧均通过销轴铰接有剪刀架部件26,为了带动剪刀架部件26进行展开和收缩,两个剪刀架部件26的中间端通过销轴分别铰接在联动板21的外侧面,为了带动支撑板24进行升降,两个剪刀架部件26的另一端通过销轴分别铰接在支撑板24的下表面两侧。
22.如图5
‑
12所示,采摘机械手3位于升降装置的上表面并对葡萄藤上成熟的葡萄进行采摘;采摘机械手3包括机械臂31、摄像头32、采摘机构、固定机构和支撑机构,机械臂31带动采摘机构根据采摘葡萄的位置进行相应的移动,采摘机构对固定机构固定的葡萄进行剪断葡萄藤蔓,固定机构固定葡萄藤上需要采摘的葡萄同时防止采摘下的葡萄发生移动,支撑机构能够收集采摘下的葡萄进行支撑;为了带动采摘机构根据成熟葡萄的位置进行相应的调整,多个机械臂31的下表面矩形阵列固定安装在支撑板24的上表面,机械臂31为五轴关节机械臂31,机械臂31内部设置有伺服电机,五个伺服电机直接通过谐波减速器、同步带轮等驱动五个关节轴的旋转,实现采摘不同位置的葡萄,为了进行分辨葡萄的成熟度和控制成熟葡萄的位置,摄像头32的下表面安装在机械臂31的一端外侧面,摄像头32通过颜色识别模块识别葡萄的成熟度;采摘机构,安装在机械臂31的一端的位置上,为了机械臂31能够调整采摘机构的位置,在机械臂31的一端固定安装有控制机壳33,为了自动驱动采摘机构,在控制机壳33的内底壁固定安装采摘电机3301,为了自动进行剪切葡萄果茎,在采摘电机3301的输出轴固定安装转盘3302,为了对采摘机构进行限位,在控制机壳33的槽口内壁固定安装限位槽体3303,然后限位槽体3303的内壁滑动插接滑块3304,为了对葡萄的果茎进行剪切,在滑块3304的上表面通过销轴铰接剪刀组件3305,为了剪刀组件3305进行剪切工作,在剪刀组件3305的一端上表面固定连接复位弹簧3306,然后复位弹簧3306的另一端固定安装在剪刀组件3305的另一端,复位弹簧3306提供剪刀剪刀组件3305的两端进行复位,使得带有刀刃的一端进行相反移动,达到剪切完成后远离葡萄果茎的目的,为了控制剪刀组件3305进行开合动作,对葡萄果茎进行剪切工作,在转盘3302的上表面中心处固定安装挤压块3307,挤压块3307是由连接杆和两个凸块构成,两个凸块在连接杆上呈上下对称分布,连接杆固定安装在转盘3302的上表面,然后挤压块3307的两端分别与剪刀组件3305的两端滑动连接;
进一步地,为了带动剪刀组件3305进行来回移动,剪切完葡萄果茎后能够收回,在转盘3302的上表面开设滑槽3308,为了拉动滑块3304在限位槽体3303内进行滑动,在滑块3304的外表面固定安装限位连板3309,然后限位连板3309的一端内壁滑动连接在挤压块3307的连接杆外表面用来进行限位,为了带动限位连板3309进行水平移动,在限位连板3309的下表面通过连接柱滑动插接在滑槽3308的内壁,限位连板3309是由板件、开设在板件一端的限位孔和连接柱构成,限位孔的内壁与挤压块3307的连接柱外表面滑动连接;固定机构,安装在控制机壳33的下表面的位置上,为了自动驱动固定机构进行旋转,在控制机壳33的下表面固定安装固定电机34,为了支撑固定多串葡萄,在固定电机34的输出轴一端固定安装托盘3401,固定电机34可通过凸轮分割器调整托盘3401转动的角度,为了带动葡萄进行上下移动,在托盘3401的上表面环形阵列固定安装固定液压缸3402,为了自动夹持需要采摘葡萄的果茎,在固定液压缸3402的活塞杆一端固定安装气动手指3403,为了控制夹持葡萄果茎的力度,在气动手指3403的机爪外侧面固定安装压力传感器3404,两个压力传感器3404位于两个机爪的相对面,为了防止气动手指3403的机爪在夹持过程中造成葡萄果茎的外表面破损断裂,在气动手指3403的机爪外侧面固定安装橡胶垫3405;支撑机构,固定安装在转盘3302的上表面位置上,为了对葡萄起到支撑作用,在转盘3302的上表面通过通孔呈环形阵列分布固定安装支撑架35,为了对葡萄起到保护作用,在支撑架35的外侧面固定安装硅胶槽体3501,硅胶槽体3501为硅胶材料构成,减少葡萄在托盘3401移动过程中产生晃动造成外表面受到挤压的作用力,为了便于气动手指3403进行放置葡萄至硅胶槽体3501内,气动手指3403的一端与硅胶槽体3501的外表面滑动连接,气动手指3403能够位于硅胶槽体3501的内部,为了便于葡萄移动至收集框42内,在托盘3401的下表面呈环形阵列分布通过销轴铰接盖板3503,盖板3503位于托盘3401的通孔下方,为了自动控制盖板3503进行开合,在托盘3401的下表面呈环形阵列分布固定安装支撑电机3502,然后支撑电机3502的输出轴与盖板3503的一侧固定安装销轴一端固定安装用来驱动盖板3503发生偏转,支撑电机3502为带刹车的电机,在未通电时支撑电机3502的输出轴无法转动。
23.如图1和图13所示,收集机构位于升降装置的外侧面并对采摘机械手3采摘的葡萄进行收集;收集机构,安装在支撑板24的两侧外表面的位置上,为了支撑收集机构,在支撑板24的两侧外表面固定安装限位架4,为了盛放采摘的葡萄,在限位架4的上表面设置收集框42,为了防止收集框42内的葡萄盛放过多,造成葡萄掉落,在限位架4的上表面通过凹槽固定安装称重传感器41,称重传感器41位于收集框42的下方。
24.工作原理:在需要采摘葡萄时,移动小车1移动至葡萄大棚内,在对葡萄架两侧的葡萄进行采摘时,驱动支撑板24上的机械臂31进行转动,机械臂31一端的摄像头32进行捕捉葡萄架上的葡萄成熟度与成熟度达标的葡萄位置,带动控制机壳33进行移动,使得托盘3401上的气动手指3403能够夹持组需要采摘葡萄的果茎部分后,控制机壳33的采摘电机3301进行驱动,带动转盘3302发生转动,限位连板3309上的连接柱沿着滑槽3308的轨迹移动带动限位连板3309进行水平移动,推动滑块3304在限位槽体3303内向控制机壳33的外部进行移动,剪刀组件3305被推向夹持葡萄果茎的方向,同时转盘3302上的挤压块3307转动
能够与剪刀组件3305的两端进行滑动连接,剪刀组件3305带有刀刃的两端相对偏转,能够将位于两端之间的葡萄果茎进行剪断,复位弹簧3306受到拉伸,转盘3302继续转动使得限位板拉动滑块3304回缩,同时挤压块3307离开剪刀组件3305的两端,剪刀组件3305的两端受到复位弹簧3306的弹力进行复位,带动刀刃的两端进行相反移动,剪刀组件3305能够离开葡萄果茎进行复位;托盘3401上的固定液压缸3402带动夹持有采摘下来的葡萄向下移动,气动手指3403能够带动葡萄位于支撑架35上的硅胶槽体3501内进行存放,同时能够不阻碍托盘3401的转动,固定电机34驱动托盘3401转动,使得相邻未夹持葡萄的气动手指3403位于剪刀组件3305的下方,进行第二次采摘葡萄,在多个硅胶槽体3501内都放置有葡萄时,机械臂31控制托盘3401进行移动,使得托盘3401能够位于收集框42的上方,并靠近收集框42,支撑电机3502带动盖板3503发生偏转,气动手指3403松开对葡萄的夹持,采摘的葡萄能够通过托盘3401上的通孔进入收集框42内进行放置,称重传感器41检测收集框42内的重量,在重量达到设定的阈值后,提醒操作人员进行更换收集框42;在需要对葡萄架上方的葡萄进行采摘时,通过移动小车1的车厢内底壁升降液压缸2的活塞杆向上升起,带动联动板21带动连接板25上的剪刀架部件26进行展开,剪刀架部件26的展开后使得支撑板24能够上升,带动采摘机械手3一同升高,同时限位杆23在限位管套22内进行滑动,采摘机械手3升高后能够采摘葡萄架上方的葡萄,放置在收集框42内。
25.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1