冗余驱动五轴混联机构及机构控制用elm误差补偿方法
1.本发明属于机械结构设计及控制领域,特别是涉及冗余驱动五轴混联机构及机构控制用elm误差补偿方法。
背景技术:
2.目前,在航空航天、船舶、轨道交通等领域的大型复杂零件的加工关系到国防安全和国民经济发展,体现了国家的重大需求。而传统的大型数控机床运动部件惯量大,并且各驱动轴负载差异大,导致各驱动轴动态响应速率不匹配,制约了机床高速加工性能,且具有造价昂贵、安装调试难度大、生产适应性差等缺点。因此,亟需发明新型的加工装备。
3.串联机器人具有工作空间大,运动灵活等特点,目前被广泛应用于搬运、装配和焊接等工业领域;但是,其也具有运动惯量大,关节累计误差大等缺点,故无法实现高刚度、高精度和高速运动。并联机器人由于具有闭环的结构特点,故机构紧凑,刚度高,承载能力大,且无累计误差,末端精度较高;但是,由于并联机构结构复杂,常常受到奇异位形的影响,在实际应用中受到制约。对此,一些学者提出冗余驱动并联机器人的概念,通过添加冗余支链或驱动冗余,能够有效提高并联机器人的承载能力,克服机器人的奇异位形,并获得更好的静、动态性能。
4.混联机器人是通过将串联机构与并联机构相结合的新机构,同时具有串联机构和并联机构的优点,可作为传统大型数控机床的有益补充。现有的混联机构中,多为末端输出多为一平移两转动(1t2r)或两平移一转动(2t1r)的少自由度并联机构与末端ac摆角头机构串联。而本体并联机构为三平移的较少,除了利用delta机构为本体来做混联机构。然而,delta机构的驱动副为转动副,灵活性较好,但是刚度和强度不高,通常适合用来做抓取工作,而不适合用作加工装备。因此,亟需设计一些以三平移机构为本体机构,且以移动副作为驱动副的混联机构来作为混联机器人加工机构。
5.现有专利申请号为cn111230844a的专利,公开了一种零耦合度且正向位置解析和运动解耦的三平移并联机构。其技术方案为:一种零耦合度且正向位置解析和运动解耦的三平移并联机构,由两条混合支链分别连接在动平台(1)、静平台(0)之间而成,动平台(1)的一端(t)连接于混合支链一,另一端(p)连接于混合支链二,其中,混合支链一包含运动平面相互垂直的平行四边形机构一(a)和平行四边形机构二(b),平行四边形机构一(a)的一条短边直接与动平台(1)的一端(t)固定连接,平行四边形机构一(a)的另一条短边与在xy平面上运动的平面子并联机构的末端构件(s)固定连接;而平面子并联机构包含分支一、分支二,分支一由滑块一(p11)和两个平行轴线转动副子链(r12
‑
r13)串联连接于末端构件(s),分支二由平行四边形机构二(b)的一条短边和滑块二(p21)串联连接而成,平行四边形机构二(b)的另一条短边与末端构件(s)直接固定连接;而滑块一(p11)在机架导轨一(x)上,滑块二(p21)在机架导轨二(y)上;混合支链二是这样构成的,由垂直于xy平面的机架导轨三(z)上的滑块三(p31),通过转动副一(r32)串联连接于平行四边形机构三(c)的一条短杆,平行四边形机构三(c)的另一条短杆,通过转动副二(r33)串联连接于动平台(1)的另一
端(p)。
6.上述现有的发明机构为纯并联机构,其末端工作空间较小,且工作空间中存在大量奇异位置无法避开,使得有效工作空间大大降低,且并联机构末端不具有各向同性的特征。若在其末端加上一个铣刀头,则其只能用作三轴铣削加工,使用功能极大受限,且由于机构不具备对称的特性,故加工末端不具有各项同性的特性,因此不利于加工。
技术实现要素:
7.针对现有加工装备对于大型复杂零件加工的不足,本发明提供冗余驱动五轴混联机构及机构控制用elm误差补偿方法,该混联机构具有半对称特性,且结构简单,制造方便,整机刚度和精度较高,且具有解析式运动学正解,热误差补偿、控制方便等优点。
8.本发明提供冗余驱动五轴混联机构,由两自由度ac摆角头、机架、两条混合支链和动平台组成,所述两自由度ac摆角头、两条混合支链和动平台设置在机架内,所述动平台的中心点为p,两条混合支链上下分别为混合支链一和混合支链二,所述混合支链一由支链ⅰ、支链ⅱ、支链ⅲ和平行四边形机构
②
构成,所述混合支链二由支链ⅳ构成,所述混合支链一通过两侧支链ⅰ和支链ⅱ外侧端以及支链ⅲ后侧端固定在机架内,所述混合支链二通过上方支链ⅳ顶端固定在机架内,所述混合支链一中的支链ⅰ包括移动副p
11
和4r平行四边形机构
①
,所述支链ⅱ中移动副p
21
与两个互相串联的转动副r
22
以及转动副r
23
相连,所述支链ⅲ为冗余驱动支链中移动副p
31
与两个互相串联的转动副r
32
以及转动副r
33
相连,所述支链ⅰ、支链ⅱ和支链ⅲ相交于点s,点s视为由这三条支链构成的平面并联机构的子动平台的中心点,点s与4r平行四边形机构
②
串联构成了混合支链一,所述混合支链二包括移动副p
41
、转动副r
42
、转动副r
43
和4r平行四边形机构
③
,混合支链一和混合支链二相交于点p,点p视为为并联机构的动平台的中心点,所述两自由度ac摆角头作为串联机构由转动副r
s1
和转动副r
s2
构成并串联在并联机构的末端点p上,转动副r
s1
与转动副r
s2
互相垂直。
9.同时针对五轴混联机构的热误差补偿问题,本发明根据五轴混联机构关键点位置的温度值和所测量的热误差值来构建改进的elm模型,通过改进的elm模型和实测的五轴混联机构关键点位置温度值来预测五轴混联机构的热误差,并根据模型预测的热误差来对五轴混联机构进行误差补偿,以减小五轴混联机构的误差。
10.作为本发明机构进一步改进,当冗余驱动五轴混联机构用于立式加工装备,转动副r
s1
的轴线与z轴平行,当冗余驱动五轴混联机构用于卧式加工装备,转动副r
s1
的轴线与y轴平行。
11.作为本发明机构进一步改进,所述机架有4个导轨,机架导轨1与y轴导轨重合,机架导轨2和机架导轨3与x轴重合,机架导轨导轨4位于z轴平行,且位于yoz平面内。
12.作为本发明机构进一步改进,五轴混联机构的控制用elm误差补偿方法,如下所示,具体步骤如下:
13.步骤1.1,根据训练样本中关键点位置温度值和所测量的热误差值构建elm模型:
[0014][0015]
式中,x
i
是机构关键点位置温度的测量值,i=1,2,
…
n,n是温度测量值的个数,同时也是elm网络输入层的层数,y
k
是改进elm网络的输出值,是机构的热误差预测值,k是热
误差预测值的个数,β
j
是网络输出权重,j=1,2,
…
l,l是改进elm的隐含层节点数,b
j
是网络的输入偏置,w
j
是隐含层偏置,f()是极限学习机的激活函数;
[0016]
步骤1.2,随机初始化elm网络的网络输出权重β
j
、隐含层偏置w
j
和网络输入偏置b
j
,并将随机初始化参数的时刻作为初始时刻,令β
0j
=β
j
,b
0j
=b
j
,w
0j
=w
j
[0017]
步骤1.3,根据elm网络输出值的误差和上一时刻的参数值来调整输出权重和网络偏置值:
[0018]
步骤1.3.1,求取网络输出值误差的当前调整阈值e0:
[0019]
e0=p
·
(y
k
‑
y
′
k
)
[0020]
式中,y
k
是0时刻网络的热误差输出值,y’k
是0时刻机构实际热误差值,p是误差调整权值;
[0021]
步骤1.3.2,根据调整阈值分别求取网络输出权重β
0j
、隐含层偏置w
0j
和网络输入偏置b
0j
的加权平均值和协方差矩阵:
[0022][0023][0024][0025][0026][0027][0028]
式中,β
0j
、分别是网络输出权重β
0j
、隐含层偏置w
0j
和网络输入偏置b
0j
的加权平均值,p
0β
、p
0w
、p
0b
分别是分别求取网络输出权重β
0j
、隐含层偏置w
0j
和网络输入偏置b
0j
的协方差矩阵;
[0029]
步骤1.3.3,将网络输出权重、隐含层偏置和网络输入偏置组成混合矩阵将网络输出权重、隐含层偏置和网络输入偏置加权平均值组成加权平均值混合矩阵求取贝塔分布的均值m
0j
:
[0030][0031]
式中,h为常数0.3;
[0032]
步骤1.3.4,将网络输出权重、隐含层偏置和网络输入偏置协方差矩阵组成协方差混合矩阵求取贝塔分布参数a
0j
和u0j:
[0033][0034]
[0035]
步骤1.3.5,根据贝塔分布参数和混合矩阵θ
0j
构建贝塔分布函数,并在贝塔分布函数中进行采样抽取,获取下一时刻的混合矩阵θ
1j
;
[0036]
步骤1.3.6,根据下一时刻混合矩阵中的网络输出权重、隐含层偏置和网络输入偏置来更新elm网络参数,最终得到训练完成的改进elm模型,其中模型的输入权重、偏置和输出权重可在线调整。
[0037]
与现有发明相比,本发明存在以下改进:
[0038]
1.本发明通过添加一条冗余支链和冗余驱动,使得机构的刚性得到提高,且可消除机构的部分奇异位形,增大了有效工作空间,改善了整个工作空间内的刚度和驱动平稳性;
[0039]
2.本发明通过添加的冗余支链并改变机架中驱动的布置位置使得机构实现了半对称的结构特性,有利于实现各向同性,极大改善了加工性能;更符合工程实际,更有利于工程实现;
[0040]
3.本发明在并联机构末端串联了一个ac摆角头,加工范围更广,可实现了五自由度运动,是五轴加工中心的一种有益补充方案;
[0041]
4.本发明改进的elm模型根据热误差反馈值和贝塔分布函数实时更新elm模型的网络输出权重、隐含层偏置和网络输入偏置,提高模型输出的准确率。
附图说明
[0042]
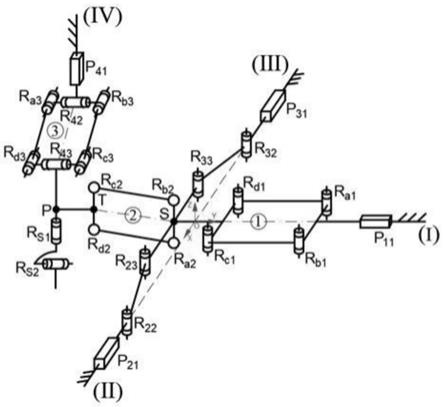
图1为本发明立式构型简图;
[0043]
图2为本发明立式构型三维模型图;
[0044]
图3为本发明卧式构型简图;
[0045]
图4为本发明卧式构型三维模型图。
具体实施方式
[0046]
下面结合附图与具体实施方式对本发明作进一步详细描述:
[0047]
本发明提供冗余驱动五轴混联机构及机构控制用elm误差补偿方法,该混联机构具有半对称特性,且结构简单,制造方便,整机刚度和精度较高,且具有解析式运动学正解,控制方便等优点。
[0048]
下面通过附图对本发明的技术进一步解释。
[0049]
图1和图对应本发明立式构型,图3和图4对应本发明卧式构型,本发明冗余驱动的五轴混联加工机器人机构,由并联机构本体和串联机构ac摆角头串联而成。
[0050]
并联机构本体由机架、混合支链一、混合支链二和动平台构成;混合支链一由三条支链相交于点s并与4r平行四边形机构
①
串联而成。支链ⅰ中移动副p
11
作为驱动副可采用伺服电机
‑‑‑
滚珠丝杆形式或直线电机驱动,移动副p
11
沿着机架导轨1来回移动,且该导轨与静坐标系的y轴共线,移动副p
11
与4r平行四边形机构
①
所在的平面平行;支链ⅱ中移动副p
21
位于静坐标系中x轴的正方向上沿着机架导轨2来回运动,导轨2与静坐标系的x轴共线。移动副p
21
通过连杆与转动副r
22
、r
23
串联,转动副r
22
与r
23
的轴线与z轴平行,转动副r
23
通过一连杆与子动平台相连与点s。支链ⅲ与支链ⅱ的机构完全相同,其中驱动副为移动副p
31
,其运动导轨与x轴共线,且位于x轴负方向。支链ⅰ、ⅱ、ⅲ相交于子动平台上的中点s,点s与
4r平行四边形机构
②
的短边中点相连,且平行四边形机构
②
与yoz所在的平面平行,4r平行四边形机构
②
的另一端短边中点t通过连杆固连在动平台上。混合支链二由移动副p
41
、转动副r
42
与r
43
以及4r平行四边形机构
③
组成。其中移动副p
41
作为驱动副,其导轨位于yoz所在的平面内且与z轴平行。移动副p
41
与转动副r
42
串联且互相垂直;转动副r
42
与r
43
互相平行,分别位于4r平行四边形机构
③
的短边中点处。混合支链一与混合支链二分别通过点t与r
43
中点相连与动平台的中心点p处。当转动副r
s1
的轴线与z轴平行时,可用作立式加工装备,当转动副r
s1
的轴线与y轴平行时可作为卧式加工装备,转动副r
s2
与r
s1
串联且相互垂直,r
s2
末端即可安装用于加工的铣刀头。
[0051]
本发明的五自由度混联机器人由并联机器人本体和两自由度ac摆角头组成,并联机器人末端具有三平移零转动(3t0r)输出,且通过四个移动副作为驱动副固定在机架上;两自由度ac摆角头末端输出为零平移两转动(0t2r),通过点p串联在并联机器人的末端动平台上。
[0052]
上述的并联机器人本体由机架、两条混合支链和动平台组成,动平台的中心点为p,支链ⅰ、ⅱ、ⅲ和平行四边形机构
②
构成了混合支链一,支链ⅳ构成混合支链二。其中,混合支链一中的支链ⅰ包括移动副(p
11
)和4r平行四边形机构
①
;支链ⅱ中移动副(p
21
)与两个互相串联的转动副(r
22
、r
23
)相连;支链ⅲ为冗余驱动支链,且结构与支链ⅱ相同;且三条支链相交于点s,点s可视为由这三条支链构成的平面并联机构的子动平台的中心点;点s与4r平行四边形机构
②
串联构成了混合支链一。混合支链二包括了移动副(p
41
)、两个转动副(r
42
、r
43
)和4r平行四边形机构
③
。混合支链一和混合支链二相交于点p,点p可视为为并联机构的动平台的中心点。两自由度ac摆角头作为串联机构由两个转动副(r
s1
、r
s2
)构成并串联在并联机构的末端点p上,转动副r
s1
与r
s2
互相垂直,当r
s1
的轴线与z轴平行时,可用作立式加工装备,当r
s1
的轴线与y轴平行时可作为卧式加工装备。
[0053]
同时针对五轴混联机构的热误差补偿问题,本发明根据五轴混联机构关键点位置的温度值和所测量的热误差值来构建改进的elm模型,通过改进的elm模型和实测的五轴混联机构关键点位置温度值来预测五轴混联机构的热误差,并根据模型预测的热误差来对五轴混联机构进行误差补偿,以减小五轴混联机构的误差。
[0054]
步骤1.1,根据训练样本中关键点位置温度值和所测量的热误差值构建elm模型:
[0055][0056]
式中,x
i
是机构关键点位置温度的测量值,i=1,2,
…
n,n是温度测量值的个数,同时也是elm网络输入层的层数,y
k
是改进elm网络的输出值,是机构的热误差预测值,k是热误差预测值的个数,β
j
是网络输出权重,j=1,2,
…
l,l是改进elm的隐含层节点数,b
j
是网络的输入偏置,w
j
是隐含层偏置,f()是极限学习机的激活函数;
[0057]
步骤1.2,随机初始化elm网络的网络输出权重β
j
、隐含层偏置w
j
和网络输入偏置b
j
,并将随机初始化参数的时刻作为初始时刻,令β
0j
=β
j
,b
0j
=b
j
,w
0j
=w
j
[0058]
步骤1.3,根据elm网络输出值的误差和上一时刻的参数值来调整输出权重和网络偏置值:
[0059]
步骤1.3.1,求取网络输出值误差的当前调整阈值e0:
[0060]
e0=p
·
(y
k
‑
y
′
k
)
[0061]
式中,y
k
是0时刻网络的热误差输出值,y’k
是0时刻机构实际热误差值,p是误差调整权值;
[0062]
步骤1.3.2,根据调整阈值分别求取网络输出权重β
0j
、隐含层偏置w
0j
和网络输入偏置b
0j
的加权平均值和协方差矩阵:
[0063][0064][0065][0066][0067][0068][0069]
式中,β
0j
、分别是网络输出权重β
0j
、隐含层偏置w
0j
和网络输入偏置b
0j
的加权平均值,p
0β
、p
0w
、p
0b
分别是分别求取网络输出权重β
0j
、隐含层偏置w
0j
和网络输入偏置b
0j
的协方差矩阵;
[0070]
步骤1.3.3,将网络输出权重、隐含层偏置和网络输入偏置组成混合矩阵将网络输出权重、隐含层偏置和网络输入偏置加权平均值组成加权平均值混合矩阵求取贝塔分布的均值m
0j
:
[0071][0072]
式中,h为常数0.3;
[0073]
步骤1.3.4,将网络输出权重、隐含层偏置和网络输入偏置协方差矩阵组成协方差混合矩阵求取贝塔分布参数a
0j
和u0j:
[0074][0075][0076]
步骤1.3.5,根据贝塔分布参数和混合矩阵θ
0j
构建贝塔分布函数,并在贝塔分布函数中进行采样抽取,获取下一时刻的混合矩阵θ
1j
;
[0077]
步骤1.3.6,根据下一时刻混合矩阵中的网络输出权重、隐含层偏置和网络输入偏置来更新elm网络参数,最终得到训练完成的改进elm模型,其中模型的输入权重、偏置和输出权重可在线调整。
[0078]
该并联机构具有结构简单,制造方便,运动学求解简单,且具有解析式运动学正解,方便控制等优点。
[0079]
该机构的控制方式为:机构正常工作时,支链ⅲ处于随动状态;当机构出现奇异
时,该冗余驱动副p
31
产生动作,以帮助机构避开或者越过奇异位置。冗余支链的内载荷如果过大,可能会驱动能量的浪费,甚至可能会对结构造成破坏,因此,为了控制冗余支链的内力,保证机构在靠近或奇异位置时能顺利避开或通过,冗余支链采用力控制模式,这样可以改善机床的刚度和动态特性,其余非冗余支链采用位置控制模式以保证位置精度。
[0080]
以上所述,仅是本发明的较佳实施例之一,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1