一种六轴机器人管线包装置的制作方法
1.本发明涉及管线包技术领域,尤其涉及一种六轴机器人管线包装置。
背景技术:
2.随着自动化工业的发展,机器人被广泛应用于很多领域,例如焊接、搬运、喷涂和清洗等领域。当前工业机器人的线缆主要分布在机身外侧,保护线缆的管线包也随着线缆分布在机身外侧,管线包装置前端安装形式无法跟随机器人一轴做旋转运动,管线包容易发生交叉磨损,进而导致线缆发生磨损,这种线缆安装分布形式只能满足机器人简单有规则的姿态作业,而对于机器人需要进行多方位、多姿态的复杂作业环境下,线缆就会出现干涉、磨损的现象,同时也会导致机器人中止运作。
3.现有技术存在如下不足:
4.1.线缆分布在机身外侧,管线包装置前端安装形式无法跟随机器人一轴做旋转运动,管线包容易发生交叉磨损。
技术实现要素:
5.为解决现有技术中存在的技术问题,本发明提供了一种六轴机器人管线包装置,包括管线包装置、六轴机器人及机器人安装座,六轴机器人包括顺次连接的机器人一轴、机器人二轴、机器人三轴、机器人四轴、机器人五轴和机器人六轴,以及机械臂;管线包装置缠绕六轴机器人,管线包装置的一端连接机器人六轴,另一端连接机器人安装座,另一端连接机器人安装座;管线包装置的中间部位与六轴机器人连接。管线包装置包括前端固定夹组件、管线包、固定支架、四轴固定夹组件、末端固定夹组件;前端固定夹组件套装在管线包的一端,固定支架和四轴固定夹组件顺序套装在管线包中部,末端固定夹组件顺序套装在管线包的另一端。前端固定夹组件中轴承套在旋转轴中成一体,旋转轴嵌套在轴承座内;用螺钉把轴承座锁在机器人安装座上,螺钉把轴承座端盖锁在轴承座上,螺钉把管线包槽板锁在旋转轴上;管线包套在固定内夹中成一体,再整体夹紧在固定座中;固定座和管线包槽板连接。四轴固定夹组件中管线包穿过滑式内夹,弹簧套在管线包外表面,管线包可在滑式内夹内滑动。本发明改进了现有管线包装置,使线缆使用寿命更高,提高作业效率,降低维护成本,且结构简易,不需要增加额外动力,可以保证机器人在多姿态连续作业下线缆不会发生干涉磨损。本发明的结构安装方便、结构简单、成本低、使用灵活,可广泛运用工业电气线缆需要保护的场景。
6.本发明提供了一种六轴机器人管线包装置,包括:
7.管线包装置、六轴机器人和机器人安装座,六轴机器人包括六个机器人轴和机械臂,六个机器人轴分别为机器人一轴、机器人二轴、机器人三轴、机器人四轴、机器人五轴和机器人六轴;
8.机器人一轴与机器人二轴连接;机器人三轴、机器人四轴、机器人五轴和机器人六轴顺次连接;
9.管线包装置缠绕六轴机器人,管线包装置的一端连接机器人六轴,另一端连接机器人安装座;
10.管线包装置的中间部位与六轴机器人连接;
11.管线包装置包括管线包、前端固定夹组件、固定支架、四轴固定夹组件和末端固定夹组件,前端固定夹组件、固定支架、四轴固定夹组件和末端固定夹组件均用于将管线包与六轴机器人连接。
12.优选地,前端固定夹组件套装在管线包的一端,固定支架和四轴固定夹组件顺序套装在管线包中部,末端固定夹组件顺序套装在管线包的另一端。
13.优选地,前端固定夹组件包括轴承、轴承座、旋转轴、管线包槽板、轴承座端盖和固定内夹;
14.轴承和旋转轴一体嵌套在轴承中,轴承座通过螺钉固定在机器人安装座上,轴承座端盖通过螺钉连接在轴承座上;
15.管线包槽板通过螺钉固定在旋转轴上;
16.管线包套在固定内夹中成一体,固定内夹和管线包槽板连接。
17.优选地,四轴固定夹组件包括弹簧和滑式内夹,管线包穿过滑式内夹,弹簧套在管线包外表面,管线包可在滑式内夹内滑动。
18.优选地,末端固定夹组件包括末端球形套、分线器和防撞球;缠绕有弹簧的管线包套在末端球形套的一端内,在末端球形套的另一端装有分线器,防撞球套在管线包外面。
19.优选地,机器人安装座的顶部连接管线包装置的前端固定夹组件,机器人安装座的底部连接机器人一轴。
20.优选地,固定支架包括多个,管线包装置通过固定支架与六轴机器人连接,固定支架分别安装在机器人二轴和机器人三轴附近。
21.优选地,管线包装置还通过四轴固定夹组件与六轴机器人连接,四轴固定夹组件通过四轴安装架固定连接在机器人四轴上。
22.优选地,管线包装置还通过末端固定夹组件与六轴机器人连接,末端固定夹组件通过末端安装架固定连接在机器人六轴上。
23.与现有技术相对比,本发明的有益效果如下:
24.1.本发明中轴承套在旋转轴中成一体,再整体嵌套在轴承座里面,用螺钉把轴承座锁在机器人安装座上,螺钉把轴承座端盖锁在轴承座上,螺钉把管线包槽板锁在旋转轴上,管线包套在固定内夹中成一体,再整体夹紧在固定座中,固定座和管线包槽板连接,这样使得机器人一轴在做旋转运作时,旋转轴跟随转动,进而带动管线包槽板和管线包转动,避免了管线包固定安装形式导致线缆打折、磨损。
25.2.本发明中缠绕有弹簧的管线包套在末端球形套一端里面,使得管线包具有转动性,在末端球形套的另一端装有分线器,每条线缆穿过分线器的线孔可避免多条线缆交叉混乱,防撞球套在管线包外面,防止管线包和机器人摩擦产生磨损。
26.3.本发明的整个管线包装置能够适应机器人多方位、多姿态作业,可以保护线缆,提高电缆使用寿命。
附图说明
27.图1是本发明的一个实施例的工作原理图;
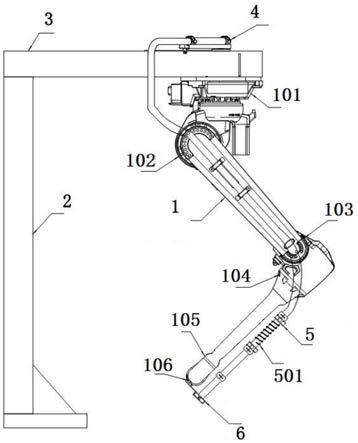
28.图2是本发明的一个实施例的整体结构立体图;
29.图3是本发明的一个实施的管线包装置的立体图;
30.图4是本发明的一个实施的前端固定夹组件的剖视图;
31.图5是本发明的一个实施的四轴固定夹组件的剖视图;
32.图6是本发明的一个实施的末端端固定夹组件的剖视图;
33.图中,1、六轴机器人;2、立柱;3、机器人安装座;101、机器人一轴;102、机器人二轴;103、机器人三轴;104、机器人四轴;105、机器人五轴;106、机器人六轴;4、前端固定夹组件;401、轴承;402、轴承座;403、旋转轴;404、管线包槽板;405、轴承座端盖;406、固定内夹;5、四轴固定夹组件;501、弹簧;502、滑式内夹;6、末端固定夹组件;601、分线器;602、末端球形套;603、防撞球、7、管线包;8、固定支架;9、管线。
具体实施方式
34.下面结合附图,对本发明的具体实施方式作详细的说明。
35.本发明提供了一种六轴机器人管线包装置,包括:
36.管线包装置、六轴机器人1和机器人安装座3,六轴机器人1包括六个机器人轴和机械臂,六个机器人轴分别为机器人一轴101、机器人二轴102、机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106;
37.机器人一轴101与机器人二轴102连接;机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106顺次连接;
38.管线包装置缠绕六轴机器人1,管线包装置的一端连接机器人六轴106,另一端连接机器人安装座3;
39.管线包装置的中间部位与六轴机器人1连接;
40.管线包装置包括管线包7、前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6,前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6均用于将管线包7与六轴机器人1连接。
41.根据本发明的一个具体实施方案,前端固定夹组件4套装在管线包7的一端,固定支架8和四轴固定夹组件5顺序套装在管线包7中部,末端固定夹组件6顺序套装在管线包7的另一端。
42.根据本发明的一个具体实施方案,前端固定夹组件4包括轴承401、轴承座402、旋转轴403、管线包槽板404、轴承座端盖405和固定内夹406;
43.轴承401和旋转轴403一体嵌套在轴承401中,轴承座402通过螺钉固定在机器人安装座3上,轴承座端盖405通过螺钉连接在轴承座402上;
44.管线包槽板404通过螺钉固定在旋转轴403上;
45.管线包7套在固定内夹406中成一体,固定内夹406和管线包槽板404连接。
46.根据本发明的一个具体实施方案,四轴固定夹组件5包括弹簧501和滑式内夹502,管线包7穿过滑式内夹502,弹簧501套在管线包7外表面,管线包7可在滑式内夹502内滑动。
47.根据本发明的一个具体实施方案,末端固定夹组件6包括末端球形套602、分线器
601和防撞球603;缠绕有弹簧501的管线包7套在末端球形套602的一端内,在末端球形套602的另一端装有分线器601,防撞球603套在管线包7外面。
48.根据本发明的一个具体实施方案,机器人安装座3的顶部连接管线包装置的前端固定夹组件4,机器人安装座3的底部连接机器人一轴101。
49.根据本发明的一个具体实施方案,固定支架8包括多个,管线包装置通过固定支架8与六轴机器人1连接,固定支架8分别安装在机器人二轴102和机器人三轴103附近。
50.根据本发明的一个具体实施方案,管线包装置还通过四轴固定夹组件5与六轴机器人1连接,四轴固定夹组件5通过四轴安装架固定连接在机器人四轴104上。
51.根据本发明的一个具体实施方案,管线包装置还通过末端固定夹组件6与六轴机器人1连接,末端固定夹组件6通过末端安装架固定连接在机器人六轴106上。
52.实施例1
53.根据本发明的一个具体实施方案,下面说明本发明的六轴机器人管线包装置进行详细说明。
54.本发明提供了一种六轴机器人管线包装置,包括:
55.管线包装置、六轴机器人1和机器人安装座3,六轴机器人1包括六个机器人轴和机械臂,六个机器人轴分别为机器人一轴101、机器人二轴102、机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106;
56.机器人一轴101与机器人二轴102连接;机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106顺次连接;
57.管线包装置缠绕六轴机器人1,管线包装置的一端连接机器人六轴106,另一端连接机器人安装座3;
58.管线包装置的中间部位与六轴机器人1连接;
59.管线包装置包括管线包7、前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6,前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6均用于将管线包7与六轴机器人1连接。
60.参照图1,整个管线包装置缠绕机身,在机器人安装座3的位置固定有前端固定夹组件4,前端固定夹组件4中套设有管线包7,当机器人一轴101转动时,前端固定夹组件4会跟随转动,用于解决管线包7出现打折的问题。在机器人四轴104附近位置固定有四轴固定夹组件5,弹簧501套在管线包7外表面,管线包7穿过滑式内夹502,使得管线包7具有伸缩弹性,当机器人四轴104做伸缩动作时,由于管线包7在滑式内夹502中,从而解决了管线包7磨损的问题。在机器人六轴106附近位置固定有末端固定夹组件6,分线器601使得管线有序分布,末端球形套602使管线包7具有转动性,以解决机器人六轴106转动时管线包7扭转磨损的问题。
61.实施例2
62.根据本发明的一个具体实施方案,下面说明本发明的六轴机器人管线包装置进行详细说明。
63.本发明提供了一种六轴机器人管线包装置,包括:
64.管线包装置、六轴机器人1和机器人安装座3,六轴机器人1包括六个机器人轴和机械臂,六个机器人轴分别为机器人一轴101、机器人二轴102、机器人三轴103、机器人四轴
104、机器人五轴105和机器人六轴106;
65.机器人一轴101与机器人二轴102连接;机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106顺次连接;
66.管线包装置缠绕六轴机器人1,管线包装置的一端连接机器人六轴106,另一端连接机器人安装座3;管线包装置的中间部位与六轴机器人1连接;
67.管线包装置包括管线包7、前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6,前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6均用于将管线包7与六轴机器人1连接。
68.前端固定夹组件4套装在管线包7的一端,固定支架8和四轴固定夹组件5顺序套装在管线包7中部,末端固定夹组件6顺序套装在管线包7的另一端。
69.机器人安装座3的顶部连接管线包装置的前端固定夹组件4,机器人安装座3的底部连接机器人一轴101。
70.固定支架8包括多个,管线包装置通过固定支架8与六轴机器人1连接,固定支架8分别安装在机器人二轴102和机器人三轴103附近。
71.管线包装置还通过四轴固定夹组件5与六轴机器人1连接,四轴固定夹组件5通过四轴安装架固定连接在机器人四轴104上。
72.管线包装置还通过末端固定夹组件6与六轴机器人1连接,末端固定夹组件6通过末端安装架固定连接在机器人六轴106上。
73.实施例3
74.根据本发明的一个具体实施方案,下面说明本发明的六轴机器人管线包装置进行详细说明。
75.本发明提供了一种六轴机器人管线包装置,包括:
76.管线包装置、六轴机器人1和机器人安装座3,六轴机器人1包括六个机器人轴和机械臂,六个机器人轴分别为机器人一轴101、机器人二轴102、机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106;
77.机器人一轴101与机器人二轴102连接;机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106顺次连接;
78.管线包装置缠绕六轴机器人1,管线包装置的一端连接机器人六轴106,另一端连接机器人安装座3;
79.管线包装置的中间部位与六轴机器人1连接;
80.管线包装置包括管线包7、前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6,前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6均用于将管线包7与六轴机器人1连接。
81.前端固定夹组件4套装在管线包7的一端,固定支架8和四轴固定夹组件5顺序套装在管线包7中部,末端固定夹组件6顺序套装在管线包7的另一端。
82.前端固定夹组件4包括轴承401、轴承座402、旋转轴403、管线包槽板404、轴承座端盖405和固定内夹406;
83.轴承401和旋转轴403一体嵌套在轴承401中,轴承座402通过螺钉固定在机器人安装座3上,轴承座端盖405通过螺钉连接在轴承座402上;
84.管线包槽板404通过螺钉固定在旋转轴403上;
85.管线包7套在固定内夹406中成一体,固定内夹406和管线包槽板404连接。
86.机器人安装座3的顶部连接管线包装置的前端固定夹组件4,机器人安装座3的底部连接机器人一轴101。
87.固定支架8包括多个,管线包装置通过固定支架8与六轴机器人1连接,固定支架8分别安装在机器人二轴102和机器人三轴103附近。
88.管线包装置还通过四轴固定夹组件5与六轴机器人1连接,四轴固定夹组件5通过四轴安装架固定连接在机器人四轴104上。
89.管线包装置还通过末端固定夹组件6与六轴机器人1连接,末端固定夹组件6通过末端安装架固定连接在机器人六轴106上。
90.参照图4,将轴承401套在旋转轴403中成一体,再整体嵌套在轴承座402里面,用螺钉把轴承座402锁在机器人安装座3上,螺钉把轴承座端盖405锁在轴承座402上,螺钉把管线包槽板404锁在旋转轴403上,管线包7套在固定内夹406中成一体,再整体夹紧在固定座中,固定座和管线包槽板404连接,这样使得机器人一轴101在做旋转运作时,旋转轴403跟随转动,进而带动管线包槽板404和管线包7转动,避免了管线包7固定安装形式导致线缆打折、磨损。
91.实施例4
92.根据本发明的一个具体实施方案,下面说明本发明的六轴机器人管线包装置进行详细说明。
93.本发明提供了一种六轴机器人管线包装置,包括:
94.管线包装置、六轴机器人1和机器人安装座3,六轴机器人1包括六个机器人轴和机械臂,六个机器人轴分别为机器人一轴101、机器人二轴102、机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106;
95.机器人一轴101与机器人二轴102连接;机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106顺次连接;
96.管线包装置缠绕六轴机器人1,管线包装置的一端连接机器人六轴106,另一端连接机器人安装座3;
97.管线包装置的中间部位与六轴机器人1连接;
98.管线包装置包括管线包7、前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6,前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6均用于将管线包7与六轴机器人1连接。
99.前端固定夹组件4套装在管线包7的一端,固定支架8和四轴固定夹组件5顺序套装在管线包7中部,末端固定夹组件6顺序套装在管线包7的另一端。
100.四轴固定夹组件5包括弹簧501和滑式内夹502,管线包7穿过滑式内夹502,弹簧501套在管线包7外表面,管线包7可在滑式内夹502内滑动。
101.机器人安装座3的顶部连接管线包装置的前端固定夹组件4,机器人安装座3的底部连接机器人一轴101。
102.固定支架8包括多个,管线包装置通过固定支架8与六轴机器人1连接,固定支架8分别安装在机器人二轴102和机器人三轴103附近。
103.管线包装置还通过四轴固定夹组件5与六轴机器人1连接,四轴固定夹组件5通过四轴安装架固定连接在机器人四轴104上。
104.管线包装置还通过末端固定夹组件6与六轴机器人1连接,末端固定夹组件6通过末端安装架固定连接在机器人六轴106上。
105.参照图5,将管线包7穿过滑式内夹502,弹簧501套在管线包7外表面,当机器人四轴104动作时,管线包7会在滑式内夹502里面滑动,弹簧501使得管线包7具有拉伸性,避免了管线包7随机器人多姿态作业发生干涉、磨损的现象。
106.实施例5
107.根据本发明的一个具体实施方案,下面说明本发明的六轴机器人管线包装置进行详细说明。
108.本发明提供了一种六轴机器人管线包装置,包括:
109.管线包装置、六轴机器人1和机器人安装座3,六轴机器人1包括六个机器人轴和机械臂,六个机器人轴分别为机器人一轴101、机器人二轴102、机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106;
110.机器人一轴101与机器人二轴102连接;机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106顺次连接;
111.管线包装置缠绕六轴机器人1,管线包装置的一端连接机器人六轴106,另一端连接机器人安装座3;
112.管线包装置的中间部位与六轴机器人1连接;
113.管线包装置包括管线包7、前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6,前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6均用于将管线包7与六轴机器人1连接。
114.前端固定夹组件4套装在管线包7的一端,固定支架8和四轴固定夹组件5顺序套装在管线包7中部,末端固定夹组件6顺序套装在管线包7的另一端。
115.末端固定夹组件6包括末端球形套602、分线器601和防撞球603;缠绕有弹簧501的管线包7套在末端球形套602的一端内,在末端球形套602的另一端装有分线器601,防撞球603套在管线包7外面。
116.机器人安装座3的顶部连接管线包装置的前端固定夹组件4,机器人安装座3的底部连接机器人一轴101。
117.固定支架8包括多个,管线包装置通过固定支架8与六轴机器人1连接,固定支架8分别安装在机器人二轴102和机器人三轴103附近。
118.管线包装置还通过四轴固定夹组件5与六轴机器人1连接,四轴固定夹组件5通过四轴安装架固定连接在机器人四轴104上。
119.管线包装置还通过末端固定夹组件6与六轴机器人1连接,末端固定夹组件6通过末端安装架固定连接在机器人六轴106上。
120.参照图6,缠绕有弹簧501的管线包7套在末端球形套602一端里面,使得管线包7具有转动性,为了避免多条线缆交叉混乱,在末端球形套602的另一端装有分线器601,每条线缆穿过分线器601的线孔即可,防撞球603套在管线包7外面,防止管线包7和机器人摩擦产生磨损。整个管线包装置能够适应机器人多方位、多姿态作业,可以保护线缆,提高电缆使
用寿命。
121.实施例6
122.根据本发明的一个具体实施方案,下面说明本发明的六轴机器人管线包装置进行详细说明。
123.本发明提供了一种六轴机器人管线包装置,包括:
124.管线包装置、六轴机器人1和机器人安装座3,六轴机器人1包括六个机器人轴和机械臂,六个机器人轴分别为机器人一轴101、机器人二轴102、机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106;
125.机器人一轴101与机器人二轴102连接;机器人三轴103、机器人四轴104、机器人五轴105和机器人六轴106顺次连接;
126.管线包装置缠绕六轴机器人1,管线包装置的一端连接机器人六轴106,另一端连接机器人安装座3;
127.管线包装置的中间部位与六轴机器人1连接;
128.管线包装置包括管线包7、前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6,前端固定夹组件4、固定支架8、四轴固定夹组件5和末端固定夹组件6均用于将管线包7与六轴机器人1连接。
129.前端固定夹组件4套装在管线包7的一端,固定支架8和四轴固定夹组件5顺序套装在管线包7中部,末端固定夹组件6顺序套装在管线包7的另一端。
130.前端固定夹组件4包括轴承401、轴承座402、旋转轴403、管线包槽板404、轴承座端盖405和固定内夹406;
131.轴承401和旋转轴403一体嵌套在轴承401中,轴承座402通过螺钉固定在机器人安装座3上,轴承座端盖405通过螺钉连接在轴承座402上;
132.管线包槽板404通过螺钉固定在旋转轴403上;
133.管线包7套在固定内夹406中成一体,固定内夹406和管线包槽板404连接。
134.四轴固定夹组件5包括弹簧501和滑式内夹502,管线包7穿过滑式内夹502,弹簧501套在管线包7外表面,管线包7可在滑式内夹502内滑动。
135.末端固定夹组件6包括末端球形套602、分线器601和防撞球603;缠绕有弹簧501的管线包7套在末端球形套602的一端内,在末端球形套602的另一端装有分线器601,防撞球603套在管线包7外面。
136.机器人安装座3的顶部连接管线包装置的前端固定夹组件4,机器人安装座3的底部连接机器人一轴101。
137.固定支架8包括多个,管线包装置通过固定支架8与六轴机器人1连接,固定支架8分别安装在机器人二轴102和机器人三轴103附近。
138.管线包装置还通过四轴固定夹组件5与六轴机器人1连接,四轴固定夹组件5通过四轴安装架固定连接在机器人四轴104上。
139.管线包装置还通过末端固定夹组件6与六轴机器人1连接,末端固定夹组件6通过末端安装架固定连接在机器人六轴106上。
140.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修
改、等同替换、改进等,均包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1