一种智能机器人上肢部分的控制系统的制作方法
1.本发明涉及一种智能机器人领域,尤其涉及一种智能机器人上肢部分的控制系统。
背景技术:
2.现有技术常通过上位机/遥控控制机器人的上肢部分,机器人下位机的实现功能往往比较简单,所需要处理的信号也并不复杂,因为,缺乏对上肢各关节件的有效控制,会导致机器人的上肢部分不够灵活,自身的处理能力较为单一,处理性能也不高,无法自动处理一些比较复杂的功能。
技术实现要素:
3.为解决上述的现有问题,现提供一种智能机器人上肢部分的控制系统,其特征在于,所述控制系统中包括一客户端和一处理端,所述客户端用于发送指令,所述处理端设置在所述智能机器人上并与所述客户端远程连接,用于接收所述指令并根据所述指令控制所述上肢部分;
4.所述处理端中包括:
5.一接收模块,所述接收模块用于接收所述客户端发送的所述指令;
6.一测量模块,所述测量模块用于获取所述智能机器人的空间信息;
7.一传输模块,所述传输模块分别与所述测量模块、所述接收模块连接,用于接收所述指令和所述环境信息并输出;
8.一处理模块,所述处理模块与所述传输模块连接,用于根据所述指令和所述环境信息,生成一控制所述上肢部分运动的控制指令;
9.一驱动模块,所述驱动模块与所述处理模块连接,包括:
10.多个手臂关节驱动单元,分别设置在所述上肢部分中的手臂关节上并依次连接,用于根据所述控制指令控制所述手臂关节,并将手臂关节控制结果输出至所述处理模块;
11.一手爪驱动单元,设置在所述上肢部分中的手爪上,用于根据所述控制指令控制所述手爪,并将手爪控制结果输出至所述处理模块。
12.优选的,所述测量模块中包括:
13.第一测量单元,用于获取所述智能机器人的环境信息;
14.第二测量单元,用于获取所述智能机器人的位置信息;
15.第三测量单元,用于获取所述智能机器人在三轴加速计中的坐标信息。
16.优选的,所述处理模块中包括:
17.第一处理单元,所述第一处理单元与所述传输模块连接,用于根据所述空间信息,生成一控制所述上肢部分停止的第一控制指令;
18.第二处理单元,所述第二处理单元与传输模块所述连接,用于根据所述客户端信息,生成一控制所述上肢部分运动的第二控制指令。
19.优选的,所述处理模块中包括:
20.第一集线单元,所述第一集线单元分别与所述第一处理单元、所述驱动模块连接,用于传输控制所述上肢部分停止的所述第一控制指令;
21.第二集线单元,所述第二集线单元分别与所述第二处理单元、所述驱动模块连接,用于传输控制所述上肢部分运动的所述第二控制指令。
22.优选的,所述驱动模块中包括:
23.一关节控制单元,分别与第一集线单元、所述第二集线单元、所述手臂关节驱动单元连接,用于将所述第一控制指令或所述第二控制指令输出至所述手臂关节驱动单元,控制所述手臂关节停止或运动,并将所述关节控制结果输出。
24.优选的,所述驱动模块中还包括:
25.一颈部驱动单元,所述颈部驱动单元设置在所述智能机器人的颈部关节处,所述颈部控制单元的一端与所述第一集线单元连接,所述颈部控制单元的另一端与所述关节控制单元连接,用于根据所述第一控制指令控制所述颈部关节,并将所述第一控制指令输出至所述关节控制单元。
26.优选的,所述处理模块中还包括:
27.一供电单元,所述供电单元的输入端与所述第一集线单元连接,所述供电单元的输出端与所述驱动模块连接,用于根据所述第一控制指令向所述驱动模块供电。
28.优选的,所述手爪驱动单元中包括:
29.多个手爪控制单元,所述手爪控制单元与所述处理模块连接并与所述手爪连接,用于根据所述控制指令控制所述手爪,并将手爪控制结果输出至所述处理模块;
30.一相机装置,所述相机装置设置在手爪上,用于获取所述手爪的位置信息,并输出至所述处理模块
31.一力传感装置,所述力传感器设置在手爪上,用于获取所述手爪的作用力情况,并输出至所述处理模块。
32.优选的,所述驱动模块中还包括:
33.一攀爬钩子,所述攀爬钩子设置在两个所述手臂关节驱动单元之间并分别与所述传输模块、所述第一集线单元和所述第二集线单元连接,用于根据所述控制指令控制所述攀爬钩子。
34.优选的,所述驱动模块中还包括:
35.一末端传感单元,所述末端传感单元设置所述手臂部分的末端对应的所述手臂关节上,并分别与所述第一集线单元、所述传输模块连接,用于获取所述末端关节的运动状态,并通过所述传输模块输出至所述处理模块。
36.上述技术方案的有益效果是:对上肢的关节有效控制,提高机器人的上肢部分的灵活性。
附图说明
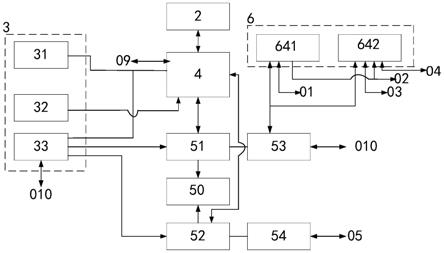
37.图1是本发明中的一种优选实施例的电路结构示意图;
38.图2是本发明中的一种优选实施例的关节控制单元示意图;
39.图3是本发明中的一种优选实施例的供电单元的示意图。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
41.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
42.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
43.一种智能机器人上肢部分的控制系统,如图1所示,控制系统中包括一客户端1和一处理端,客户端1用于发送指令,处理端设置在智能机器人上并与客户端1远程连接,用于接收指令并根据指令控制上肢部分;
44.处理端中包括:
45.一接收模块2,接收模块2用于接收客户端1发送的指令;
46.一测量模块3,测量模块3用于获取智能机器人的空间信息;
47.一传输模块4,传输模块4分别与测量模块3、接收模块2连接,用于接收指令和环境信息并输出;
48.一处理模块5,处理模块5与传输模块4连接,用于根据指令和环境信息,生成一控制上肢部分运动的控制指令;
49.一驱动模块6,驱动模块6与处理模块5连接,包括:
50.多个手臂关节驱动单元61,分别设置在上肢部分中的手臂关节上并依次连接,用于根据控制指令控制手臂关节,并将手臂关节控制结果输出至处理模块5;
51.一手爪驱动单元62,设置在上肢部分中的手爪上,用于根据控制指令控制手爪,并将手爪控制结果输出至处理模块5。
52.具体地,在实际操作过程中,如抓取物件、带动物件移动,松开物件等操作过程中,常需要智能机器人的上肢部分中手臂和手爪配合运动,由此设置一客户端1,操作人员通过客户端1发送实际操作需要的指令,接收模块2接收指令,测量模块3获取智能机器人的空间信息,处理模块5对空间信息进行分析,才能生成与客户端1发送指令匹配的控制上肢部分运动的控制指令,以达到操作人员的操作需求。
53.进一步地,考虑到在启动智能机器人,控制智能机器人上肢运动过程中,接收模块2需要实时接收客户端1发送的指令,测量模块3需要实时获取空间信息,空间信息中的数据较为繁杂,由此设置一传输模块4,以保证指令、数据等在传输过程中的准确性,于此处,可选取千兆网络作为传输模块4以完成信号、数据的传输。
54.本发明的一种较优实施例中,测量模块3中包括:
55.第一测量单元31,用于获取智能机器人的环境信息;
56.第二测量单元32,用于获取智能机器人的位置信息;
57.第三测量单元33,用于获取智能机器人在三轴加速计中的坐标信息。
58.具体地,考虑到智能机器人的空间信息会影响到处理模块5对上肢部分的具体控制,由此,采用一包括多个相机组的感测头部作为第一测量单元31,获取智能机器人的环境图像并进行处理得到智能机器人所需的环境信息,采用一gps天线作为第二测量单元32,获
取智能机器人的位置信息,采用一定位惯性测量单元作为第三测量单元33,获取智能机器人在三轴加速计中的坐标信息,由此对三个测量单元获取的信息进行整合即可获取智能机器人的空间信息。
59.进一步地,采用一定位惯性测量单元作为第三测量单元33不仅能够获取坐标信息,还能够为处理模块5提供辅助计算,以及辅助智能机器人中的供电分配。
60.本发明的一种较优实施例中,处理模块5中包括:
61.第一处理单元51,第一处理单元51与传输模块4连接,用于根据空间信息,生成一控制上肢部分停止的第一控制指令;
62.第二处理单元52,第二处理单元52与传输模块4连接,用于根据客户端1信息,生成一控制上肢部分运动的第二控制指令。
63.具体地,在实际操作过程中,比如带动物件移动到指定位置处,不仅需要控制智能机器人的上肢部分运动,还需要控制智能机器人的上肢部分及时停止,为了提高操作的准确性,于处理模块5中设置第一处理单元51和第二处理单元52,并且第一处理单元51和第二处理单元52之间设置一逻辑驱动50,由此,实现精确地控制上肢部分的运动和停止。
64.本发明的一种较优实施例中,处理模块5中包括:
65.第一集线单元53,第一集线单元53分别与第一处理单元51、驱动模块6连接,用于传输控制上肢部分停止的第一控制指令;
66.第二集线单元54,第二集线单元54分别与第二处理单元52、驱动模块6连接,用于传输控制上肢部分运动的第二控制指令。
67.具体地,智能机器人在实际组装过程中,常会出现因线路过多而引起的组装错误,并且线路具有一定重量,也会影响到智能机器人的操作准确和能量消耗,因此在电路设计过程中,常需要考虑尽可能减少线路,优化电路设计,由此,设置第一集线单元53和第二集线单元54,多个关节驱动单元通过第一集线单元53和第二集线单元54即可接收控制指令。
68.本发明的一种较优实施例中,如图2所示,驱动模块6中还包括:
69.一关节控制单元63,分别与第一集线单元53、第二集线单元54、手臂关节驱动单元61连接,用于将第一控制指令或第二控制指令输出至手臂关节驱动单元61,控制手臂关节停止或运动,并将关节控制结果输出。
70.本发明的一种较优实施例中,驱动模块6中还包括:
71.一颈部驱动单元64,颈部驱动单元64设置在智能机器人的颈部关节处,颈部控制单元的一端与第一集线单元53连接,颈部控制单元的另一端与关节控制单元63连接,用于根据第一控制指令控制颈部关节,并将第一控制指令输出至关节控制单元63。
72.具体地,在控制智能机器人的上肢部分停止运动的时候,为保持智能机器人的运动的一致性,避免智能机器人到达运动学的上限结构,在上肢部分停止运动时,常需要颈部也随之停止运动,由此,设置一颈部驱动单元64,颈部驱动单元64中包括颈部辅助电控641和颈部电机控制器642,颈部驱动单元的一端与第一集线单元53连接,颈部单元的另一端中包括四条输出线路,第一输出线路01,第二输出线路02,第三输出线路03和第四输出线路04,均与关节控制单元63连接,将控制手臂部分停止的第一控制指令输出至关节控制单元63。
73.具体地,第二集线单元54通过第五输出线路05将第二控制指令输出至关节控制单
元63。
74.进一步地,关节控制单元63中包括电机控制器631和辅助电控632,电机控制器631的输入端分别与第二输出线路02,第三输出线路03、第四输出线路04和第五输出线路05连接,辅助电控632的输入端分别与第一输出线路01、第二输出线路02和第五输出线路05连接,用于接收第一控制指令和第二控制指令。
75.进一步地,手臂关节驱动单元61中包括:电机611、增量编码器612、刹车编码器613、绝对值编码器614和集电环615,电机611与电机控制器631连接,根据指令控制电机611带动手臂关节转动,增量编码器612也与电控控制器连接,用于控制手臂部分的运动角度,刹车编码器613、绝对值编码器614均与辅助电控632连接,刹车编码器613用于根据控制指令控制手臂部分,绝对值编码器614用于控制手部部分的运动位移,集电环615用于连接相邻的手臂关节,使每个手臂关节可以连续旋转,不会达到运动学上受限而影响到手臂部分的具体操作。
76.本发明的一种较优实施例中,如图3所示,处理模块5中还包括:
77.一供电单元55,供电单元55的输入端与第一集线单元53连接,供电单元55的输出端与驱动模块6连接,用于根据第一指令向驱动模块6供电。
78.具体地,供电单元55的输入端通过指令线路02与第一集线单元53连接,其中包括急停控制部件551、高压配电部件52和低压配电部件553,高压配电部件552通过第六输出线路06向电机控制器631输出第一供电电压,低压配电部件通过第七输出线路07和第八输出线路08输出第二供电电压和第三供电电压,电机控制器631分别与第六输出线路06、第七输出线路07连接,用于接收第二供电电压,辅助电控632则与第七输出线路07连接,当急停控制部件接收第一控制指令时,电机控制器631不再向电机611供电,电机611停止转动,此时的第二供电电压让电机控制器631、辅助电控632保持带电,即智能机器人的上肢部分带电,但静止不运动。
79.本发明的一种较优实施例中,手爪驱动单元62中包括:
80.多个手爪控制单元621,手爪控制单元621与处理模块5连接并与手爪连接,用于根据控制指令控制手爪,并将手爪控制结果输出至处理模块5;
81.一相机装置622,相机装置622设置在手爪上,用于获取手爪的位置信息,并输出至处理模块5
82.一力传感装置623,力传感器设置在手爪上,用于获取手爪的作用力情况,并输出至处理模块5。
83.具体地,手爪驱动单元62中包括手爪控制单元621,根据控制指令去控制手爪的运动状态,如手爪张开和闭合,相机装置622设置在手爪中间,以获取手爪的位置信息,力传感装置623设置在手爪上,以获取手爪的作用力情况,以精确控制上肢部分与外界之间的作用力。
84.进一步地,在电路结构设计过程中,手爪驱动单元62中手爪控制单元621、相机装置622、力传感装置623均与供电单元55的第八输出电路08连接,以实现供电,以及,相机装置622与传输模块4连接,手爪控制单元621、力传感装置623与第七输出电路07连接,以实现控制过程。
85.本发明的一种较优实施例中,驱动模块6中还包括:
86.一攀爬钩子64,攀爬钩子64设置在两个手臂关节驱动单元61之间并分别与传输模块4、第一集线单元53和第二集线单元54连接,用于根据控制指令控制攀爬钩子64。
87.具体地,于此处设置8个手臂关节驱动单元61,在第七个手臂关节驱动单元61和第8个手臂关节驱动单元61之间设置一攀爬钩子64,攀爬钩子64中包括:第二电机611和控制第二电机611的第二电机控制器631,攀爬钩子64分别与传输模块4的第九输出线路09、第一集线单元53的第二输出线路02和第三输出线路03、第二集线单元54的第五输出线路05连接,用于根据控制指令控制攀爬钩子64,并将控制结果输出至传输模块4。
88.本发明的一种较优实施例中,驱动模块6中还包括:
89.一末端传感单元65,末端传感单元65设置手臂部分的末端对应的手臂关节上,并分别与第一集线单元53、传输模块4连接,用于获取末端关节的运动状态,并通过传输模块4输出至处理模块5。
90.具体地,末端传感单元65获取末端关节的运动状态,分别与第一输出线路01、传输模块4的第九输出线路09连接,根据控制指令接收末端关节的运动状态,并且,末端传感单元65还与第八输出线路08连接,以实现对模块传感单元的供电。
91.进一步地,第三测量单元33能够实现电源分配的功能,因此,可将第三测量单元33的输出端通过一第十输出线路010辅助电控632、第二电机控制器631和相机装置622连接,以实现供电。
92.以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1