一种基于双面凸轮机构的拾放机械手及使用方法
1.本发明涉及一种拾放机械手,尤其涉及一种基于双面凸轮机构的拾放机械手及使用方法。
背景技术:
2.机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,拾放机械手主要用于自动化生产线中,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
3.机械手可代替人工不断重复工作和劳动,可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械手作业的准确性和各种环境中完成作业的能力,在各个领域的不同场景具备广阔的发展前景。
4.凸轮驱动式机械手,是以凸轮作为驱动机构的凸轮式机械手,它具有结构简单,动作平稳,相位准确、工作节奏快、故障率低、成本低,使用寿命长等独特优点。
技术实现要素:
5.本发明的目的是:研发出一套动作确实可靠,工作速度高,成本低的拾放机械手,用于代替人工在自动化生产线中高速取放物体。
6.为了解决上述技术问题,本发明提出以下技术方案:一种基于双面凸轮机构的拾放机械手,它包括机架、双面驱动凸轮组件、y轴移动组件和x轴移动组件;所述机架用于固定安装驱动凸轮组件、y轴移动组件和x轴移动组件以及承载机械手末端拾取的物体;所述y轴移动组件和x轴移动组件在驱动凸轮组件的驱动下实现y轴、x轴两个自由度的移动,通过在x轴移动组件末端安装机械手末端工具实现物体的快速精准的拾放。
7.所述双面驱动凸轮组件包括凸轮驱动轴、x轴驱动凸轮、x轴从动滚轮、x轴摆动连杆、x轴连杆转轴、轴承a、x轴连杆调整杆、x轴连杆末端滚轮、y轴驱动凸轮、y轴从动滚轮、y轴摆动连杆、y轴连杆转轴、轴承b和y轴连杆末端滚轮;所述凸轮驱动轴一端与驱动电机连接用于将电机输出转矩传递给x轴驱动凸轮和y轴驱动凸轮;所述x轴驱动凸轮和y轴驱动凸轮通过键与凸轮驱动轴连接,二者初始成一定夹角通过螺栓安装形成双面驱动凸轮,转动时与凸轮驱动轴以相同的角速度保持同轴转动。
8.所述x轴摆动连杆的顶部通过轴承a转动安装在x轴连杆转轴上,所述x轴连杆转轴固定在机架的顶部,所述x轴摆动连杆的底端呈v型结构,在其中个一顶角安装用于导向的x轴从动滚轮,另一个顶角通过x轴连杆调整杆安装x轴连杆末端滚轮;所述x轴连杆末端滚轮与x轴移动组件相配合。
9.所述y轴摆动连杆通过y轴连杆转轴转动安装在机架上,所述y轴摆动连杆呈三角形,在y轴摆动连杆的其中一个顶角铰接有用于导向的y轴从动滚轮,y轴摆动连杆的另一个顶角铰接有y轴连杆末端滚轮;所述y轴连杆末端滚轮与y轴移动组件相配合。
10.所述y轴移动组件包括y轴组件底板、y轴连接板、y轴导轨a、y轴滑块a、y轴导轨b和
y轴滑块b;所述y轴底板用于承载y轴组件,y轴底板两边安装有一组导轨滑块,y轴滑块a、y轴滑块b通过螺栓与y轴底板固定;y轴导轨a、y轴导轨b通过螺栓与机架固定;y轴连接板一端安装于y轴组件底板中部,另一端有一槽孔用于和双面驱动凸轮组件的y轴连杆末端滚轮配合,y轴连杆末端滚轮在槽孔中滚动,带动y轴移动组件按照一定规律上下移动。
11.所述x轴移动组件包括x轴组件底板、x轴滑块连接板、滚轮导向板a、滚轮导向板b、x轴导轨a、x轴导轨b、x轴滑块a1、x轴滑块a2、x轴滑块b1和x轴滑块b2构成;所述x轴组件底板用于承载整个x轴移动组件,所述x轴组件底板上留有矩形切口,用于通过滚轮导向板a、滚轮导向板b的安装;所述x轴组件底板通过螺栓将其与x轴滑块连接板的一面连接在一起,x轴滑块连接板另一面通过螺栓与x轴滑块a1、x轴滑块b1、x轴滑块a2、x轴滑块b2连接;x轴滑块连接板在四个滑块中间位置有一矩形孔,矩形孔两侧分别安装有滚轮导向板a和滚轮导向板b;所述x轴移动组件工作时x轴连杆末端滚轮在滚轮导向板a、滚轮导向板b之间滚动,推动x轴移动组件按照一定规律在x轴导轨a、x轴导轨b上左右来回移动。
12.所述y轴驱动凸轮驱动y轴移动组件存在以下6个运动阶段,并采用以下计算方法计算y轴驱动凸轮相关参数:
13.运动阶段:
14.1)下降高度1cm用时0.5s;
15.2)保持高度1.5s;
16.3)上升高度1cm用时0.5s;
17.4)下降高度1cm用时0.5s;
18.5)保持高度1.5s;
19.6)上升高度1cm用时0.5s;
20.具体计算方法:
21.1)计算一个完整周期的时间:
22.∑t
i
=0.5s+1.5s+0.5s+0.5s+1.5s+0.5s=5s
23.2)确定凸轮所需的角速度:
[0024][0025][0026]
3)计算凸轮旋转运动每个阶段转动角度:
[0027][0028][0029][0030][0031]
[0032][0033]
式中:β
11
、β
12
、β
13
、β
14
、β
15
、β
16
为y轴驱动凸轮凸轮旋转运动每个阶段转动角度。
[0034]
所述x轴驱动凸轮驱动x轴移动组件存在以下的4个运动阶段,并采用以下计算方法计算x轴驱动凸轮相关参数:
[0035]
运动阶段:
[0036]
1)移动3cm用时2秒;
[0037]
2)保持0.5s;
[0038]
3)返回3cm用时2秒;
[0039]
4)保持0.5s;
[0040]
计算方法及参数:
[0041][0042][0043][0044][0045]
式中:β
21
、β
22
、β
23
、β
24
为y轴驱动凸轮凸轮旋转运动每个阶段转动角度。
[0046]
一种基于双面凸轮机构的拾放机械手的是使用方法,使用前,通过螺栓将机械手安装于要使用的位置,并在凸轮驱动轴安装用于驱动机械手的电机或与主机主传动系统集成、在x轴移动组件末端根据实际需求安装用于零部件拾取的吸盘、卡爪或者机械手;使用时,通过控制系统给驱动电机上电,机械手开始工作,机械手到达取物位置时,控制气源电磁阀工作,使末端工具拾取物品,到达放物位置时,控制气源电磁阀工作,使末端工具放置物品;使用结束,通过主控制系统断电、断气即可。
[0047]
本发明有如下有益效果:
[0048]
1、安装布局灵活高,方便与主机主传动系统集成。
[0049]
2、模块化产品,结构紧凑,有多种运动轨迹、形式可供用户选择。
[0050]
3、保持了凸轮传动动作平稳、相位准确、工作节奏快、故障率低、成本低、安全性高、使用寿命长等优点。
[0051]
4、降低了机器总体设计的复杂度,简化了机器的控制系统,减少了机器的设计与制造成本,缩短了开发周期。
附图说明
[0052]
下面结合附图和实施例对本发明作进一步说明。
[0053]
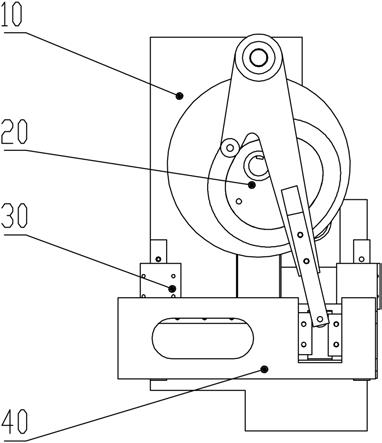
附图1是本发明的主体结构示意图。
[0054]
图中:机架10,双面驱动凸轮组件20,y轴移动组件30,x轴移动组件40;
[0055]
附图2是本发明的双面驱动凸轮组件正面结构示意图。
[0056]
附图3是本发明的双面驱动凸轮组件反面结构示意图。
[0057]
图中:凸轮驱动轴201,x轴驱动凸轮202,x轴从动滚轮203,x轴摆动连杆204,x轴连杆转轴205,轴承a206,x轴连杆调整杆207,x轴连杆末端滚轮208,y轴驱动凸轮209,y轴从动滚轮210,y轴摆动连杆211,y轴连杆转轴212,轴承b213,y轴连杆末端滚轮214;
[0058]
附图4是本发明的y轴模组结构示意图。
[0059]
图中:y轴组件底板301,y轴连接板302,y轴导轨a303,y轴滑块a304,y轴导轨b305,y轴滑块b306
[0060]
附图5是本发明的x轴模组结构示意图。
[0061]
图中:x轴组件底板401,x轴滑块连接板402,滚轮导向板a403,滚轮导向板b404,x轴导轨a405,x轴导轨b406,x轴滑块a1407,x轴滑块a2408,x轴滑块b1409,x轴滑块b2410;
[0062]
附图6是本发明的第一视角三维图。
[0063]
附图7是本发明的第二视角三维图。
[0064]
附图8是本发明的第三视角三维图。
具体实施方式
[0065]
下面结合附图对本发明的实施方式做进一步的说明。
[0066]
实施例1:
[0067]
如附图1
‑
8,一种基于双面凸轮机构的拾放机械手,它包括机架10、双面驱动凸轮组件20、y轴移动组件30和x轴移动组件40;所述机架10用于固定安装驱动凸轮组件20、y轴移动组件30和x轴移动组件40以及承载机械手末端拾取的物体;所述y轴移动组件30和x轴移动组件40在驱动凸轮组件20的驱动下实现y轴、x轴两个自由度的移动,通过在x轴移动组件40末端安装机械手末端工具实现物体的快速精准的拾放。通过上述的机械手,其采用双面凸轮机构,结构简单,使用方便,而且采用单输入的驱动方式,简化了传动过程。而且通过采用凸轮机构保证了传动的稳定性。
[0068]
进一步的,所述双面驱动凸轮组件20包括凸轮驱动轴201、x轴驱动凸轮202、x轴从动滚轮203、x轴摆动连杆204、x轴连杆转轴205、轴承a206、x轴连杆调整杆207、x轴连杆末端滚轮208、y轴驱动凸轮209、y轴从动滚轮210、y轴摆动连杆211、y轴连杆转轴212、轴承b213和y轴连杆末端滚轮214;所述凸轮驱动轴201一端与驱动电机连接用于将电机输出转矩传递给x轴驱动凸轮202和y轴驱动凸轮209;所述x轴驱动凸轮202和y轴驱动凸轮209通过键与凸轮驱动轴201连接,二者初始成一定夹角通过螺栓安装形成双面驱动凸轮,转动时与凸轮驱动轴201以相同的角速度保持同轴转动。通过上述的双面驱动凸轮组件20能够同时实现横向和竖向动作。通过凸轮机构保证了驱动的稳定性。工作过程中,通过x轴驱动凸轮202和y轴驱动凸轮209同步的驱动x轴摆动连杆204和y轴摆动连杆211,进而通过相应的x轴驱动凸轮202和y轴驱动凸轮209驱动相应的x轴移动组件40和y轴移动组件30。
[0069]
进一步的,所述x轴摆动连杆204的顶部通过轴承a206转动安装在x轴连杆转轴205上,所述x轴连杆转轴205固定在机架10的顶部,所述x轴摆动连杆204的底端呈v型结构,在其中个一顶角安装用于导向的x轴从动滚轮203,另一个顶角通过x轴连杆调整杆207安装x轴连杆末端滚轮208;所述x轴连杆末端滚轮208与x轴移动组件40相配合。通过上述的x轴摆动连杆204能够实现x向移动。
[0070]
进一步的,所述y轴摆动连杆211通过y轴连杆转轴212转动安装在机架10上,所述y
轴摆动连杆211呈三角形,在y轴摆动连杆211的其中一个顶角铰接有用于导向的y轴从动滚轮210,y轴摆动连杆211的另一个顶角铰接有y轴连杆末端滚轮214;所述y轴连杆末端滚轮214与y轴移动组件30相配合。通过上述的y轴摆动连杆211能够实现y向移动。
[0071]
进一步的,所述y轴移动组件30包括y轴组件底板301、y轴连接板302、y轴导轨a303、y轴滑块a304、y轴导轨b305和y轴滑块b306;所述y轴底板301用于承载y轴组件30,y轴底板301两边安装有一组导轨滑块,y轴滑块a304、y轴滑块b305通过螺栓与y轴底板301固定;y轴导轨a303、y轴导轨b305通过螺栓与机架10固定;y轴连接板302一端安装于y轴组件底板301中部,另一端有一槽孔用于和双面驱动凸轮组件20的y轴连杆末端滚轮214配合,y轴连杆末端滚轮214在槽孔中滚动,带动y轴移动组件30按照一定规律上下移动。
[0072]
进一步的,所述x轴移动组件40包括x轴组件底板401、x轴滑块连接板402、滚轮导向板a403、滚轮导向板b404、x轴导轨a405、x轴导轨b406、x轴滑块a1407、x轴滑块a2408、x轴滑块b1409和x轴滑块b2410构成;所述x轴组件底板401用于承载整个x轴移动组件40,所述x轴组件底板401上留有矩形切口,用于通过滚轮导向板a403、滚轮导向板b404的安装;所述x轴组件底板401通过螺栓将其与x轴滑块连接板402的一面连接在一起,x轴滑块连接板402另一面通过螺栓与x轴滑块a1407、x轴滑块b1409、x轴滑块a2408、x轴滑块b2410连接;x轴滑块连接板402在四个滑块中间位置有一矩形孔,矩形孔两侧分别安装有滚轮导向板a403和滚轮导向板b404;所述x轴移动组件40工作时x轴连杆末端滚轮208在滚轮导向板a403、滚轮导向板b404之间滚动,推动x轴移动组件40按照一定规律在x轴导轨a405、x轴导轨b406上左右来回移动。
[0073]
实施例2:
[0074]
为了实现y轴移动组件30的y向运动,所述y轴驱动凸轮209驱动y轴移动组件30存在以下6个运动阶段,并采用以下计算方法计算y轴驱动凸轮209相关参数:
[0075]
运动阶段:
[0076]
1)下降高度1cm用时0.5s;
[0077]
2)保持高度1.5s;
[0078]
3)上升高度1cm用时0.5s;
[0079]
4)下降高度1cm用时0.5s;
[0080]
5)保持高度1.5s;
[0081]
6)上升高度1cm用时0.5s;
[0082]
具体计算方法:
[0083]
1)计算一个完整周期的时间:
[0084]
∑t
i
=0.5s+1.5s+0.5s+0.5s+1.5s+0.5s=5s
[0085]
2)确定凸轮所需的角速度:
[0086][0087][0088]
3)计算凸轮旋转运动每个阶段转动角度:
[0089]
[0090][0091][0092][0093][0094][0095]
式中:β
11
、β
12
、β
13
、β
14
、β
15
、β
16
为y轴驱动凸轮凸轮旋转运动每个阶段转动角度。
[0096]
通过上述的角度就可以制造出相应的y轴驱动凸轮209。
[0097]
实施例3:
[0098]
所述x轴驱动凸轮202驱动x轴移动组件30存在以下的4个运动阶段,并采用以下计算方法计算x轴驱动凸轮202相关参数:
[0099]
运动阶段:
[0100]
1)移动3cm用时2秒;
[0101]
2)保持0.5s;
[0102]
3)返回3cm用时2秒;
[0103]
4)保持0.5s;
[0104]
计算方法及参数:
[0105][0106][0107][0108][0109]
式中:β
21
、β
22
、β
23
、β
24
为y轴驱动凸轮凸轮旋转运动每个阶段转动角度。
[0110]
实施例4:
[0111]
一种基于双面凸轮机构的拾放机械手的是使用方法,使用前,通过螺栓将机械手安装于要使用的位置,并在凸轮驱动轴201安装用于驱动机械手的电机或与主机主传动系统集成、在x轴移动组件30末端根据实际需求安装用于零部件拾取的吸盘、卡爪或者机械手;使用时,通过控制系统给驱动电机上电,机械手开始工作,机械手到达取物位置时,控制气源电磁阀工作,使末端工具拾取物品,到达放物位置时,控制气源电磁阀工作,使末端工具放置物品;使用结束,通过主控制系统断电、断气即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1