一种机械臂结构的制作方法
1.本发明涉及机械臂领域,尤其涉及一种机械臂结构。
背景技术:
2.目前,机械臂的关节主要使用线缆进行供电和通讯,当机械臂单方向旋转多圈的时候,使电源线和通讯线缠在一起越拧越紧,使电源线和通讯线与关节的驱动板脱落,断掉,破损,损坏,进而导致机械臂无法供电和通讯。
3.针对机械臂多关节之间的供电和通讯问题,现有技术更是难以实现无线缆同时进行供电和通讯。
技术实现要素:
4.本发明实施例提供了一种机械臂结构,实现机械臂多关节之间无线电能传输以及无线通讯。
5.第一方面,本发明实施例提供了一种机械臂结构,包括:n个依次连接的子机械臂;相邻所述子机械臂之间旋转连接;n为大于或等于2的整数;
6.第i个子机械臂靠近第i+1个子机械臂的一端设置有第一发射线圈,所述第i+1个子机械臂靠近所述第i个子机械臂的一端设置有第一接收线圈,用于实现所述第i个子机械臂向第i+1个子机械臂传输电能;1≤i≤n-1。
7.可选的,机械臂结构还包括:主控制柜和基座;
8.所述主控制柜包括总电源模块,用于给机械臂结构提供电源;
9.所述基座与所述第1个子机械臂连接,用于支撑所述第1个子机械臂旋转。
10.可选的,所述子机械臂还包括:电路板和电机;
11.所述电路板与对应子机械臂的第一接收线圈电连接,用于获取所述第一接收线圈接收的电能;
12.所述电机用于驱动对应子机械臂进行预设轨迹的运动;
13.所述电路板设置有单片机控制电路;所述单片机控制电路与所述电机电连接,用于控制所述电机。
14.可选的,所述子机械臂还包括:容纳所述电路板、所述电机、所述第一发射线圈和所述第一接收线圈的外支撑轴;
15.所述电机的输出轴与所述外支撑轴固定连接,用于带动所述外支撑轴进行预设轨迹的运动;
16.第i个子机械臂的第一接收线圈贴附于所述外支撑轴远离所述第i+1个子机械臂的一侧;第i个子机械臂的第一发射线圈贴附于所述外支撑轴靠近所述第i+1个子机械臂的一侧。
17.可选的,所述电路板还与对应子机械臂的第一发射线圈电连接,用于控制所述第一发射线圈发出电能。
18.可选的,所述电路板还包括脉冲宽度调制芯片、驱动电路和接收电路;
19.所述驱动电路与所述接收电路电连接,用于将直流电转换为交流脉冲由所述第一发射线圈发送;
20.所述脉冲宽度调制芯片与所述驱动电路电连接,用于产生控制交流脉冲频率的脉冲宽度调制信号;
21.所述单片机控制电路与所述脉冲宽度调制芯片电连接,用于控制所述脉冲宽度调制信号的占空比;
22.所述接收电路与所述第一接收线圈电连接,用于将所述第一接收线圈接收的交流脉冲转换为直流电;
23.所述驱动电路与所述第一发射线圈电连接,用于将交流脉冲发送给第一发射线圈。
24.所述接收电路分别与所述单片机控制电路、所述脉冲宽度调制芯片和所述驱动电路电连接,用于提供直流电源;可选的,所述子机械臂还包括:主控制柜;
25.所述电路板设置有第一无线通信模块,所述第一无线通信模块与所述电路板中的接收电路电连接;
26.所述主控制柜还包括第二无线通信模块,用于与所述第一无线通信模块之间进行无线通讯;所述第二无线通信模块与所述主控制柜中的总电源模块电连接。
27.可选的,所述子机械臂的所述单片机控制电路与所述第一无线通信模块电连接,以控制所述子机械臂控制所述电机转动。
28.可选的,所述单片机控制电路还用于根据所述通信信号控制第i个子机械臂向第i+1个子机械臂传输电能。
29.可选的,所述无线通信模块为wifi模块、蓝牙模块或zigbee模块。
30.本发明实施例提供的机械臂结构,可以由n个依次连接的子机械臂构成,相邻子机械臂之间旋转连接,即可以进行多角度的旋转,当前子机械臂在靠近下一个子机械臂的一端设置有第一发射线圈,同时,下一个子机械臂在靠近当前子机械臂的一端设置有第一接收线圈,第一发射线圈与第一接收线圈可实现无线电能传输,如此,当前子机械臂通过第一接收线圈得到上一个子机械臂传输过来的电能,然后由第一发射线圈送到下一个子机械臂,如此实现多个子机械臂之间的无线电能传输,避免相邻子机械臂连接处的关节发生损坏。
附图说明
31.图1为本发明实施例提供的一种机械臂结构示意图;
32.图2为本发明实施例提供的一种子机械臂结构示意图;
33.图3为本发明实施例提供的另一种子机械臂结构示意图;
34.图4为本发明实施例提供的另一种机械臂结构示意图;
35.图5为本发明实施例提供的又一种子机械臂结构示意图。
具体实施方式
36.下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描
述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
37.随着机械臂逐渐智能化发展,其所带来的积极作用也日益为人们所知:其一,它能代替人工操作;其二,可以按照标准化的流程完成工作。从而大大提高了劳动生产率。在机械臂的研制过程中,设计的内容不仅包括一般的机械、液压、气动等基础知识,还应用了电子技术、通讯技术和计算技术等。对于关节型的机械臂结构,操作机的手臂类似人的上肢关节动作,具有多个可旋转关节,因此,其控制方法也较为复杂。
38.到目前为止,机械臂的关节的供电和通讯有两种方式,一是线缆连接二是滑环。当机械臂的关节使用线缆供电和通讯的时候,当机械臂单方向旋转多圈的时候,使电源线和通讯线缠在一起越拧越紧,使电源线和通讯线与关节的驱动板脱落,断掉,破损,损坏,导致机械臂无法供电和通讯。当机械臂的关节使用滑环供电和通讯的时候,可以旋转多圈,但是滑环的劣势毕节多,由于滑环的结构特性,使用中会产生摩擦力矩,寿命比较短,容易短路烧坏,掉粉,过载烧毁,防护等级不够时候容易短路。由于滑环的特点限制,弊大于利,市面上机机械臂的关节绝大数是使用线缆。
39.针对机械臂多关节之间的供电和通讯问题,现有技术更是难以实现无线缆同时进行供电和通讯。
40.为解决机械臂多关节之间的供电和通讯问题,本发明实施例提供了一种机械臂结构,包括:n个依次连接的子机械臂;相邻子机械臂之间旋转连接;n为大于或等于2的整数;第i个子机械臂靠近第i+1个子机械臂的一端设置有第一发射线圈,第i+1个子机械臂靠近第i个子机械臂的一端设置有第一接收线圈,用于实现第i个子机械臂向第i+1个子机械臂传输电能;1≤i≤n-1。
41.本发明实施例提供的机械臂结构,可以由n个依次连接的子机械臂构成,相邻子机械臂之间旋转连接,即可以进行多角度的旋转。示例性的,当前子机械臂在靠近下一个子机械臂的一端设置有第一发射线圈,同时,下一个子机械臂在靠近当前子机械臂的一端设置有第一接收线圈,第一发射线圈与第一接收线圈可实现无线电能传输,如此,当前子机械臂通过第一接收线圈得到上一个子机械臂传输过来的电能,然后由第一发射线圈送到下一个子机械臂,如此实现多个子机械臂之间的无线电能传输,避免相邻子机械臂连接处的关节发生损坏。
42.以上是本发明的核心思想,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下,所获得的所有其他实施例,都属于本发明保护的范围。
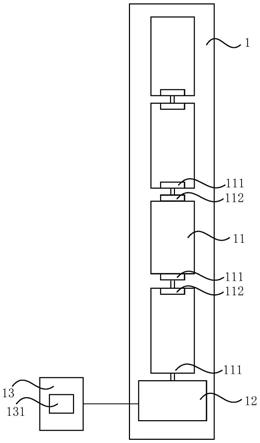
43.图1为本发明实施例提供的一种机械臂结构示意图,如图1所示,机械臂1包括子机械臂1,以及依次连接的子机械臂11,其中,机械臂1的具体结构以及子机械臂11的个数n,本发明实施例均不进行限定,图1中子机械臂11的个数仅作为一种举例。具体的,子机械臂11的两端分别设置有第一接收线圈111和第一发射线圈112,靠近此子机械臂11第一接收线圈111一端的下个子机械臂11设置有第一发射线圈112,同时,靠近此子机械臂11第一发射线圈112一端的下个子机械臂11设置有第一接收线圈111,如此实现子机械臂11可同时为其余的多个子机械臂11进行无线供电。进一步的,第一接收线圈111和第一发射线圈112之间通过磁耦合谐振原理进行无线电能传输。
44.继续参考图1所示,可选的,机械臂1还包括:主控制柜13和基座12;主控制柜13包括总电源模块131,用于给机械臂结构提供电源;基座12与第1个子机械臂11连接,用于支撑所述第1个子机械臂旋转。
45.具体的,基座12与第1个子机械臂11连接,用于支撑整个机械臂1进行旋转工作,总电源模块131可通过硬接线的方式经过基座12后直接与第1个子机械臂11供电,第1个子机械臂11将接收到的电能再通过第一发射线圈111传输给第2个子机械臂11,如此,总电源模块131实现为整个机械臂1进行无线供电,保证个子机械臂11之间全部实现无线供电,避免相邻子机械臂11之间的关节在进行单方向多圈旋转时出现损坏的问题。
46.需要说明的是,通过基座12与第1个子机械臂11之间可以通过特定的安装方式连接,不会影响到第1个子机械臂11进行多圈旋转,具体的连接方式,本发明实施例对比不做特殊限定。
47.图2为本发明实施例提供的一种子机械臂结构示意图,如图2所示,可选的,子机械臂11还包括:电路板113和电机114;电路板113与对应子机械臂11的第一接收线圈111电连接,用于获取第一接收线圈111接收的电能;电机114用于驱动对应子机械臂111进行预设轨迹的运动;电路板113设置有单片机控制电路1131;单片机控制电路1131与电机114电连接,用于控制电机114。
48.其中,电机114用于驱动对应子机械臂111进行预设轨迹的运动,电机114的具体类型本发明实施例不进行限定,例如可以是直流伺服电机或者交流伺服电机,具体的,采用直流伺服电机具有良好的启动、制动和调速特性,可很方便地在较宽范围内实现平滑的无级调速,动态响应特性和稳定性较好;采用交流伺服电机具有直流伺服电机的所有优点,且结构简单、稳速精度高以及动态响应特性更好等技术特点,可达到更大的功率和更高的转速。
49.单片机控制电路1131可以包括单片机控制芯片,其具体型号本发明实施例不进行限定,例如可以选择8051控制芯片,具有体积小、价格便宜、稳定性高和抗干扰能力强等优点。
50.具体的,子机械臂11中的第一接收线圈111与电路板113电连接,电路板113中设置有单片机控制电路1131,使单片机控制电路1131与电机114电连接,如此第一接收线圈111接收到的电能为电路板113供电,电路板113再通过单片机控制电路1131控制电机114带动子机械臂11进行预设轨迹的运动。其中预设轨迹的运动可以是子机械臂11任意角度的旋转,具体旋转的方向和角度本发明实施例不进行限定。
51.需要说明的是,机械臂1中的各个子机械臂11可同时进行不同方向和角度的旋转,每个子机械臂的旋转方向和角度由其对应的单片机控制电路1131进行控制,如此保证机械臂操作更加灵活。
52.继续参考图2所示,可选的,子机械臂11还包括:容纳电路板113、电机114、第一发射线圈112和第一接收线圈111的外支撑轴115;电机114的输出轴与外支撑轴115固定连接,用于带动外支撑轴115进行预设轨迹的运动;第i个子机械臂的第一接收线圈111贴附于外支撑轴115远离第i+1个子机械臂的一侧;第i个子机械臂的第一发射线圈112贴附于外支撑轴115靠近第i+1个子机械臂的一侧。
53.其中,外支撑轴115主要用于带动子机械臂11进行预设轨迹的运动,外支撑轴115的常见形式有直轴和弯轴,本发明实施例对此不进行限定。外支撑轴115的材料发明实施例
对此也不进行限定,例如可以是钢材质的,具有较好的硬度,可以对内部器件进行保护。
54.具体的,结合图1和图2所示,子机械臂11的外支撑轴115可认为是整个子机械臂11的外部结构,其内部可容纳电路板113、电机114、第一发射线圈112和第一接收线圈111,其中第一接收线圈111贴附于外支撑轴115远离下一个子机械臂11的一侧,第一发射线圈112贴附于外支撑轴115靠近下一个子机械臂11的一侧,然后,第一接收线圈111与电路板113电连接,电路板113中的单片机控制电路1131与电机114电连接,电机114的转轴与外支撑轴115固定连连接,如此,将第一接收线圈111接收到的电能经过电机114转换成机械能,进而带动子机械臂11进行预设轨迹的运动,可实现任意角度、任意速度的旋转。
55.继续参考图2所示,可选的,电路板113还与对应子机械臂11的第一发射线圈112电连接,用于控制第一发射线圈112发出电能。
56.具体的,结合图1和图2所示,电路板113与对应子机械臂11的第一接收线圈111电连接,获取电能,然后再通过与第一发射线圈112电连接,将电能传输到第一发射线圈112,进而再通过第一发射线圈112将电能无线传输到下一个子机械臂11的第一接收线圈111,依次重复,如此实现多个子机械臂之间的无线电能传输。
57.图3为本发明实施例提供的另一种子机械臂结构示意图,电路板113还包括脉冲宽度调制芯片1132、驱动电路1133和接收电路1134;驱动电路1133与接收电路1134电连接,用于将直流电转换为交流脉冲由第一发射线圈112发送;脉冲宽度调制芯片1132与驱动电路1133电连接,用于产生控制交流脉冲频率的脉冲宽度调制信号;单片机控制电路1131与脉冲宽度调制芯片1132电连接,用于控制脉冲宽度调制信号的占空比;接收电路1134与第一接收线圈111电连接,用于将第一接收线圈111接收的交流脉冲转换为直流电;驱动电路1133与第一发射线圈112电连接,用于将交流脉冲发送给第一发射线圈112;接收电路1134分别与单片机控制电路1131、脉冲宽度调制芯片1132和驱动电路1133电连接,用于提供直流电。
58.其中,脉冲宽度调制芯片1132用于产生控制交流脉冲频率的脉冲宽度调制信号,具体的可配合利用电阻与电容构成的rc振荡电路来产生脉冲宽度调制信号,此信号可用于控制交流脉冲频率。
59.驱动电路1133用于将直流电转换为交流脉冲,具体采用的电路结构本发明实施例不进行限定,例如可以是由4个功率场效应管组成的桥式逆变电路和驱动模块构成,驱动模块通过控制功率场效应管的开关来使得桥式逆变电路将直流电转换为交流脉冲并输出,进而发送给发射线圈。
60.接收电路1134用于将第一接收线圈111接收的交流脉冲转换为直流电,为各个电路和芯片供电,接收电路1134的具体实现结构本发明实施例不进行限定,例如可以由云母电容、普通二级管、电解电容组成,其中四个二极管可构成不控整流电路,如此,第一接收线圈111与云母电容可形成lc谐振电路,如此接收电路1134将从第一接收线圈111接收的交流脉冲经过云母电容滤波后转化成交流电,再四个二极管构成不控整流电路将交流电转换成脉动的直流电,然后脉动的直流电再通过由电解电容构成的滤波电路进行滤波,得到稳定的直流电。
61.具体的,结合图1和图3所示,接收电路1134分别与第一接收线圈111、单片机控制电路1131、脉冲宽度调制芯片1132和驱动电路1133电连接,单片机控制电路1131分别与脉
冲宽度调制芯片1132和电机114电连接,驱动电路分别与脉冲宽度调制芯片1132和第一发射线圈112电连接,如此第一接收线圈111通过上一个子机械臂11的第一发射线圈112获取到电能,并发送给接收电路1134,此时,接收电路1134接收到的电能为交流脉冲,然后由接收电路1134转化成直流电,为单片机控制电路1131、脉冲宽度调制芯片1132和驱动电路1133供电,进一步的,单片机控制电路1131控制脉冲宽度调制芯片1132输出控制交流脉冲频率的脉冲宽度调制信号,脉冲宽度调制信号再控制驱动电路1133工作,将直流电转化成交流脉冲,并发送给第一发射线圈112使其为下一个子机械臂11提供电能,如此实现多个子机械臂11之间的无线电能传输。同时,为了使子机械臂11能够进行运动,单片机控制电路1131还根据接收到的直流电控制电机114的转动,进而使得子机械臂11按照预设轨迹进行运动。在本实施例中,通过设计电路板113具体的电路连接结构,保证机械臂1中所有的子机械臂11可以实现无线电能传输,同时每个子机械臂11可根据自身电路板113中控制方法进行不同的旋转运动,保证每个子机械臂11是独立运动的。
62.在图1和图3结构的基础上,可选的,子机械臂11还可以与主控制柜13进行通讯,图4为本发明实施例提供的另一种机械臂结构示意图,图5为本发明实施例提供的又一种子机械臂结构示意图,如图4和图5所示,电路板113设置有第一无线通信模块1135,第一无线通信模块1135与电路板113中的接收电路1134电连接;主控制柜13还包括第二无线通信模块132,用于与第一无线通信模块1135之间进行无线通讯;第二无线通信模块132与主控制柜13中的总电源模块131电连接。
63.具体的,如图5所示,电路板113中的接收电路1134与第一无线通信模块1135,接收电路1134输出端直流电为第一无线通信模块1135供电,与此同时,如图4所示,主控制柜13还包括第二无线通信模块132,总电源模块131与第二无线通信模块132电连接,用于为第二无线通信模块132供电,如此,第二无线通信模块132与第一无线通信模块1135实现无线通讯。换言之,总电源模块131通过硬接线方式为第1个子机械臂供电,并通过第1个子机械臂的第一发射线圈112实现了对各个子机械臂11中第一无线通信模块1135的无线供电,进而使得第二无线通信模块132与第一无线通信模块1135实现无线通讯或者各个子机械臂11之间的无线通讯,保证各个子机械臂11之间不会因线缆缠绕而造成机械臂损坏。
64.可选的,无线通信模块为wifi模块、蓝牙模块或zigbee模块。
65.具体的,第一无线通讯模块1135和第二无线通信模块132可以为wifi模块、蓝牙模块或zigbee模块,具有数据传输速度快且抗干扰能力强的优点。
66.继续参考图5所示,可选的,子机械臂11的单片机控制电路1131与第一无线通信模块1135电连接,以控制子机械臂11控制电机114转动。
67.具体的,子机械臂11的单片机控制电路1131与第一无线通信模块1135电连接,如此,主控制柜13可通过第二无线通信模块132发送指令给子机械臂11中第一无线通讯模块1135,进而,第一无线通讯模块1135将收到的指令发送至单片机控制电路1131,单片机控制电路1131通过控制电机114的转动来实现的子机械臂11的转动。
68.示例性的,现要求机械臂1的第3个子机械臂11旋转180度,其他子机械臂11不进行旋转。此时,主控制柜13通过第二无线通信模块132将第3个子机械臂11旋转180度的指令只发送至第3个子机械臂11的第一无线通讯模块1135,然后第3个子机械臂11的第一无线通讯模块1135将接收到的指令发送给单片机控制电路1131,单片机控制电路1131根据接收到的
指令控制电机114转动,由于电机114的转轴与第3个子机械臂11的外支撑轴115固定连接,如此实现电机114带动第3个子机械臂11旋转180度。通过设置第一无线通信模块1135与子机械臂11的单片机控制电路电连接,保证各个子机械臂11可根据接收到的无线通讯信号进行单独的运动,使机械臂1更加智能化。
69.可选的,单片机控制电路1131还用于根据通信信号控制第i个子机械臂向第i+1个子机械臂传输电能。
70.具体的,单片机控制电路1131还可以根据接收到的通信信号控制当前子机械臂11是否向下一个子机械臂11进行电能传输。示例性的,若机械臂1共有3个子机械臂11,在进行简单操作的时候,可能只需要控制第1个子机械臂11和第2个子机械臂11之间的关节进行旋转,第3个子机械臂11与第2个子机械臂11可以看成一个固定的整体,此时,为了节约电能,可以不给第3个子机械臂11进行供电,如此,第3个子机械臂11无法进行任何操作,通过与第2个子机械臂11之间的连接结构组合成一个整体,进行旋转运动。
71.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1