动作传递构造和检测装置以及汽车用门锁装置的制作方法
1.本发明涉及动作传递构造和具备该动作传递构造的检测装置以及具备该检测装置的汽车用门锁装置。
背景技术:
2.在以往的汽车用门锁装置中,存在如下一种汽车用门锁装置,该汽车用门锁装置具备:锁杆,其能够与在门的车外侧设置的锁芯的操作对应地向解锁位置/锁定位置移动;钥匙杆和被检测连杆,它们与锁芯的解锁/锁定操作对应地做动作;以及检测开关,其通过连结于被检测连杆的检测杆与被检测连杆的动作对应地转动从而检测锁芯的解锁/锁定操作(例如参照日本特许第5205679号(专利文献1))。
3.通常,在汽车用门锁装置中,从车辆的安全上的观点出发,期望的是,在位置开关(在日本特许第5205679号中为检测开关27)检测锁杆的解锁之前,根据因锁芯的解锁操作而产生的被检测连杆的动作来使检测开关的解锁侧的电触点接通,由此检测开关检测出锁芯的解锁操作。这是因为,例如,在产生了因不正当行为而使锁杆直接进行解锁动作、从而位置开关在检测出锁芯的解锁操作之前或未检测出锁芯的解锁操作的状态下就检测出锁杆的解锁那样的情形时,采取使警报装置工作等安全对策,在该情况下,在锁芯被合法用户进行了解锁操作时,检测开关必须早于位置开关的解锁检测而可靠地检测出锁芯的解锁操作。
4.现有技术文献
5.专利文献
6.专利文献1:日本特许第5205679号公报
技术实现要素:
7.发明要解决的问题
8.然而,在日本特许第5205679号所述的汽车用门锁装置中,若设为能够利用检测开关来提前检测出锁芯的解锁操作,则检测开关的检测杆会与基于锁芯的解锁操作的被检测连杆的动作对应地沿检测方向转动,在检测出锁芯的解锁操作之后检测杆也会进一步向检测方向大幅转动。如此,若使检测杆向检测方向大幅转动,则会给检测杆带来较大的负荷,有可能招致钥匙开关中的检测杆的耐久性的降低。
9.另外,即使在汽车用门锁装置以外的装置中,在将被检测连杆设为传递构件且将检测杆设为被传递构件的情况下,在使通过锁芯、操作把手或驱动器等操作装置的操作而做动作的传递构件的动作向被传递构件传递时,若传递构件的动作过度地传递至被传递构件,则有可能给被传递构件带来较大的负荷而招致被传递构件的耐久性的降低,因此期望不使传递构件的动作过度地传递至被传递构件的动作传递构造。
10.鉴于上述问题,本发明的目的在于提供能够提高被传递构件的耐久性的动作传递构造和具备该动作传递构造的检测装置以及具备该检测装置的汽车用门锁装置。
11.用于解决问题的方案
12.根据本发明,上述问题如下那样得到解决。
13.本发明提供一种动作传递构造,在该动作传递构造中,通过使被支承为能够转动的传递构件从预先确定的初始位置沿至少一驱动方向转动,能够将该转动向被传递构件传递,该被传递构件可转动地支承于所述传递构件的附近并能从预先确定的从动初始位置沿至少一从动方向转动,该动作传递构造的特征在于,在所述传递构件具有如下结构:所述传递构件在从所述初始位置沿所述一驱动方向转动的情况下抵接于所述被传递构件,由此使所述被传递构件从所述从动初始位置沿所述一从动方向转动并转动至预先确定的检测位置,之后,即使所述传递构件继续沿所述一驱动方向转动,也不会使所述被传递构件从所述检测位置沿所述一从动方向大幅过度转动。
14.优选的是,使在所述被传递构件的附近设置的轴嵌合于设于所述传递构件自身的长孔,将所述传递构件支承为能够以所述轴为中心转动预定角度且能够在与所述轴的轴线方向正交的远近方向上移动,由此,随着所述传递构件从所述初始位置沿所述一驱动方向转动,所述传递构件的与所述被传递构件抵接的抵接部位会沿离开所述被传递构件的旋转中心的方向移动。
15.优选的是,所述传递构件以能够转动的方式连结于在所述传递构件自身的附近配置的移动构件,随着所述移动构件的移动,所述传递构件沿远近方向移动。
16.优选的是,所述移动构件被支承为能够直线运动。
17.优选的是,所述移动构件被支承为能够转动预定角度。
18.优选的是,所述传递构件具有:第1抵接部,在所述传递构件从所述初始位置沿所述一驱动方向转动的情况下,该第1抵接部抵接于所述被传递构件而使所述被传递构件从所述从动初始位置沿所述一从动方向转动;第2抵接部,在所述传递构件从所述初始位置沿另一驱动方向转动的情况下,该第2抵接部抵接于所述被传递构件而使所述被传递构件从所述从动初始位置沿另一从动方向转动;以及容纳部,其处于所述第1抵接部与所述第2抵接部之间,该容纳部能够容纳所述被传递构件的顶端部和其附近。
19.优选的是,所述传递构件以所述轴为界,在接近所述被传递构件的一侧具有所述第1抵接部、所述第2抵接部和所述容纳部,在与所述一侧相反的那侧连结有所述移动构件。
20.优选的是,所述传递构件被在所述被传递构件的附近设置的轴支承为能够转动预定角度,并且所述传递构件具有:抵接部,其能够在转动方向上抵接于所述被传递构件;以及圆弧部,其以自身的旋转中心为中心,随着所述传递构件从所述初始位置沿所述一驱动方向转动,所述被传递构件抵接于所述抵接部,从而所述被传递构件从所述从动初始位置转动至所述检测位置,之后,所述被传递构件相对于所述圆弧部在转动方向上相对地滑动,从而所述被传递构件不会从所述检测位置沿所述一从动方向大幅过度转动。
21.本发明提供一种检测装置,其具备所述动作传递构造,该检测装置的特征在于,所述被传递构件是检测杆,该检测杆以能够转动预定角度的方式支承于具备电触点的检测开关的外壳,通过该检测杆从预先确定的所述从动初始位置沿至少一从动方向转动并到达所述检测位置,从而使所述检测开关进行接通动作,所述传递构件以根据设于预定位置的操作装置的操作而从所述初始位置沿至少一驱动方向转动的方式连结于所述操作装置。
22.本发明提供一种汽车用门锁装置,其具备:所述检测装置;以及锁杆,其能够根据
设于门的锁芯的操作而从解锁位置向锁定位置移动以及进行与此相反的移动,该汽车用门锁装置的特征在于,所述操作装置是所述锁芯,所述传递构件根据所述锁芯的解锁操作而从所述初始位置沿一驱动方向转动。
23.本发明提供一种汽车用门锁装置,其具备:所述检测装置;锁杆,其能够根据设于门的锁芯的操作而从解锁位置向锁定位置移动以及进行与此相反的移动;位置开关,其检测所述锁杆的解锁位置;以及弹簧,其作用于所述锁杆的施力方向以所述锁杆的解锁位置与锁定位置之间的中间位置为界而反转,该汽车用门锁装置的特征在于,所述操作装置是所述锁芯,所述传递构件根据所述锁芯的解锁操作而从所述初始位置沿一驱动方向转动,并根据所述锁芯的锁定操作而从所述初始位置沿另一驱动方向转动,与所述锁芯的解锁操作对应地,在所述锁杆从锁定位置到达中间位置之前,所述检测杆向所述检测位置转动,从而所述检测开关检测出所述锁芯的解锁操作,之后,所述位置开关检测出所述锁杆的解锁。
24.发明的效果
25.根据本发明的动作传递构造,在利用传递构件的转动使被传递构件转动至检测位置之后,不会使被传递构件从检测位置沿一从动方向大幅过度转动,因此能够谋求提高被传递构件的耐久性。
26.根据本发明的检测装置,在利用传递构件的转动使检测开关的检测杆转动至检测位置之后,不会使检测杆从检测位置沿一从动方向大幅过度转动,因此能够谋求提高检测开关的耐久性。
27.根据本发明的汽车用门锁装置,在弹簧的施力方向发生反转之前,检测开关检测出锁芯的解锁操作,由此能够先于位置开关的解锁检测而可靠地检测出锁芯的解锁操作,并且能够谋求提高检测开关的耐久性。
附图说明
28.图1是从本发明的门锁装置的后方观察到的主视图。
29.图2是从图1中的箭头ii方向观察到的门锁装置的车内侧的侧视图。
30.图3是从图1中的箭头iii方向观察到的门锁装置的车外侧的侧视图。
31.图4是用于明确表示处于锁定状态时的门锁装置的内部构造的车内侧视图。
32.图5是用于明确表示处于解锁状态时的门锁装置的内部构造的车内侧视图。
33.图6是处于锁定状态时的门锁装置的主要部分的车内侧视图。
34.图7是表示锁芯被进行了解锁操作时的门锁装置的主要部分的初始动作的车内侧视图。
35.图8是表示在锁芯被进行了解锁操作时,门锁装置的主要部分从初始动作起进一步做动作的状态的车内侧视图。
36.图9是表示在锁芯被进行了解锁操作时,门锁装置的主要部分进一步做动作的状态的车内侧视图。
37.图10是表示基于锁芯的解锁操作而门锁装置的主要部分向解锁位置做动作的状态的车内侧视图。
38.图11是处于解锁状态时的门锁装置的主要部分的车内侧视图。
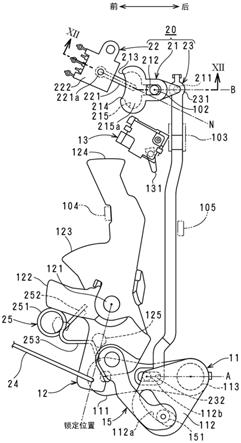
39.图12是图6的xii-xii线剖视图。
40.图13是用于说明门锁装置的主要部分的动作时刻的时序图。
41.图14是检测装置的变形例的动作说明图。
42.图15是动作传递构造的变形例的动作说明图。
43.附图标记说明
44.1、门锁装置;2、啮合单元;3、操作单元;4、主体;41、撞针进入槽;5、闩轴;6、闩;7、掣爪轴;8、掣爪;9、打开杆;10、壳体;101、罩;102、轴;103、引导部;104、第1止挡部;105、第2止挡部;11、钥匙杆;111、外部杆;112、内部杆;112a、长孔;112b、连结轴部;113、轴;12、锁杆;121、轴;122、第1臂部;123、第2臂部;124、被检测部;125、突部;13、位置开关;131、检测杆;14、打开连杆;141、支承孔;142、长孔;143、解除部;15、连结连杆;151、连结轴;16、马达;161、蜗杆;17、蜗轮;171、突部;18、外侧杆;181、端部;182、轴;183、被抵接部;19、内侧杆;191、轴;192、抵接部;20、检测装置;21、传递构件;211、连结轴部;212、长孔;213、第1抵接部;214、第2抵接部;215、容纳部;215a、覆盖部;22、钥匙开关(检测开关);221、检测杆(被传递构件);221a、旋转轴;222、外壳;23、连杆(移动构件);231、上端部;232、长孔;24、操作力传递构件;25、偏心弹簧(弹簧);251、线圈部;252、253、臂部;26、轴;27、28、操作力传递构件;29、移动构件;30、轴;31、转动构件(传递构件);311、轴;312、抵接部;313、圆弧部;32、被传递构件;321、轴;322、臂部;ih、内侧把手;lk、锁定旋钮;k、锁芯(操作装置);oh、外侧把手;r、操作力传递构件;s、撞针。
具体实施方式
45.以下,基于附图来说明本发明的一个实施方式。
46.图1~图3所示的门锁装置1具备:啮合单元2,其安装于汽车的省略图示的前门(以下记为门)内的后端部,用于将门保持在闭锁状态;以及操作单元3,其组装到啮合单元2上。
47.特别是,如图1所示,啮合单元2构成为:具有通过省略图示的螺栓而固定于门内的主体4,并在该主体4内配置有闩6和掣爪8,该闩6被朝向前后方向的闩轴5枢支承且能够在门的闭锁时与设于车身侧的撞针s卡合,该掣爪8被朝向前后方向的掣爪轴7枢支承且能够与闩6卡合或脱离,在主体4的前表面侧配置有能够与掣爪8一体地转动的打开杆9(参照图4、图5)。
48.当门被关闭时,撞针s相对地从车内侧进入设于主体4的撞针进入槽41内并与闩6卡合。闩6从图1所示的打开位置起以闩轴5为中心沿逆时针方向转动大致90度,并且掣爪8通过省略图示的弹簧的施力与闩6卡合,由此阻止闩6在打开方向(在图1中的顺时针方向)上的转动,将门保持为闭锁状态。
49.在门被关闭了的情况下,通过基于在门的车外侧设置的外侧把手oh或在门的车内侧设置的内侧把手ih的打开操作的打开杆9的转动,从而使掣爪8向打开方向(在图1中的顺时针方向)转动并脱离闩6,由此能够打开门。
50.如图2、图3所示,操作单元3具有在主体4的前表面安装的合成树脂制的壳体10。特别是如图3~图5所示,在壳体10上设有:钥匙杆11,其与在门的车外侧设置的锁芯(相当于本发明的操作装置)k连结;锁杆12,其能够向解锁位置和锁定位置转动;位置开关13,其能够检测锁杆12的解锁位置;打开连杆14,其能够与锁杆12一起向解锁位置和锁定位置移动;连结连杆15,其将钥匙杆11和锁杆12彼此连结起来;马达16,其能够正反转动;蜗轮17,其通
过马达16进行正反转动,能够将该转动传递至锁杆12;外侧杆18,其与外侧把手oh连结;内侧杆19,其与内侧把手ih连结;以及检测装置20,其用于检测锁芯k的操作。
51.此外,在图4、图5的图示中,为了明确表示操作单元3的内部构造,切除主体4的一部分,并且省略了用于将壳体10的后表面封闭的罩101(参照图2)。
52.钥匙杆11通过朝向车内外方向的轴113以能够转动的方式枢支承于壳体10的下部,并且钥匙杆11具有暴露到壳体10外的外部杆111和配置于壳体10的内侧且能够与外部杆111一体地转动的内部杆112。
53.外部杆111经由上下方向的棒等操作力传递构件r(参照图3)连结于锁芯k的杆k1,由此,外部杆111与由锁芯k的锁定操作引起的、杆k1从中立位置沿逆时针方向的转动对应地从图3所示的初始位置向锁定方向(图3中的顺时针方向)转动预定角度,另外,外部杆111同样地与由解锁操作引起的、杆k1从中立位置沿顺时针方向的转动对应地从初始位置向解锁方向(图3中的逆时针方向)转动预定角度。
54.内部杆112与外部杆111一体地从图4、图5所示的各初始位置向锁定方向(在图4、图5中的逆时针方向)和解锁方向(在图4、图5中的顺时针方向)转动预定角度,并且,在内部杆112的下部设置的圆弧状的长孔112a经由连结连杆15连结于锁杆12,内部杆112的沿上下方向移动的端部连结于后述的连杆23的下部。由此,锁芯k的解锁操作和锁定操作经由钥匙杆11、连结连杆15传递至锁杆12,还经由钥匙杆11、连杆23、后述的传递构件21传递至检测开关22。此外,长孔112a设定为比相当于锁杆12从锁定位置到解锁位置的移动量的长度以及相当于锁杆12从解锁位置到锁定位置的移动量的长度稍长。
55.锁杆12被朝向车内外方向的轴121枢支承为能够在壳体10内转动预定角度,并且锁杆12能够从图4所示的锁定位置转动至图5所示的解锁位置以及进行与此相反的转动,锁杆12在被支承于壳体10的偏心弹簧25的作用力下被向解锁方向和锁定方向方向施力。锁杆12通过与设于壳体10的第1止挡部104(例如参照图6)抵接而保持于锁定位置,通过与设于壳体10的第2止挡部105(例如参照图11)抵接而保持于解锁位置。
56.在锁杆12的下端部连结有操作力传递构件24的端部和连结连杆15,操作力传递构件24能够将在门的车内侧设置的锁定旋钮lk的操作力向锁杆12传递。并且,在锁杆12设有第1臂部122、第2臂部123,在蜗轮17在马达16的驱动下转动时,能够使该第1臂部122和第2臂部123选择性地卡合于分别在蜗轮17的表面和背面设置的多个(在本实施方式中为3个)突部171。由此,锁杆12根据锁定旋钮lk和锁芯k的手动操作以及在马达16的电动作用下的蜗轮17的转动,克服偏心弹簧25的施力从图4所示的锁定位置向图11所示的解锁位置转动以及进行与此相反的转动。
57.对于偏心弹簧25,由图6~图11可知,线圈部251支承于壳体10,一个臂部252固定于壳体10,另一个山形状的臂部253成为自由端。通过设于锁杆12自身的突部125一边使另一个臂部253挠曲一边在另一个臂部253上滑动,从而锁杆12能够从锁定位置向解锁位置转动以及进行与此相反的转动。
58.作用于锁杆12的偏心弹簧25的施力方向以锁杆12的解锁位置与锁定位置之间的中间位置为界而反转。即,在锁杆12位于比中间位置偏向解锁位置侧时,偏心弹簧12的施力向解锁方向发挥作用,在锁杆12位于比中间位置偏向锁定位置侧时,偏心弹簧12的施力向锁定方向发挥作用。
59.如图4、图5所示,通过使设于打开连杆14的下部的鼓状的支承孔141以能够沿前后方向摆动的方式嵌合于外侧杆18的端部181,并且使上下方向的长孔142以能够相对于锁杆12沿上下方向滑动的方式嵌合于锁杆12,从而打开连杆14能够从动于锁杆12向解锁位置的移动和向锁定位置的移动而以端部181为中心从图4所示的锁定位置向图11所示的解锁位置摆动以及进行与此相反的摆动,且打开连杆14基于与外侧把手oh的打开操作相伴随的外侧杆18的转动而向打开方向(上方)移动。
60.蜗轮17通过轴26以能够转动的方式枢支承于壳体10,并与固定于马达16的旋转轴的蜗杆161啮合,由此蜗轮17在马达16的电动作用下进行正反转动。
61.如图4所示,在锁杆12和打开连杆14处于锁定位置时,在根据设于车内的操作开关的解锁操作或便携式的操作开关的解锁操作而马达16进行旋转的情况下,蜗轮17向解锁方向(在图4中的逆时针方向)转动,背面侧的多个突部171中的一个突部171抵接于第2臂部123。由此,锁杆12克服偏心弹簧25的施力而向解锁方向(在图4中的顺时针方向)转动并向图5所示的解锁位置移动。并且,在锁杆12和打开连杆14向解锁位置移动时,在即将进行该移动之前使位置开关13的检测杆131与锁杆12的被检测部124相接触而接通,马达16的旋转停止。另外,在锁定旋钮lk被进行解锁操作的情况下,锁定旋钮lk的解锁操作经由操作力传递构件24向锁杆12传递,由此锁杆12克服偏心弹簧25的施力而从锁定位置向解锁位置移动。
62.此外,对于锁芯k被进行解锁操作的情况下的动作,在后面进行详细叙述。
63.如图5所示,在锁杆12和打开连杆14处于解锁位置时,在根据设于车内的操作开关的锁定操作或便携式的操作开关的锁定操作而马达16进行旋转的情况下,蜗轮17向锁定方向(在图5中的顺时针方向)转动,表面侧的多个突部171中的一个突部171抵接于第1臂部122。由此,锁杆12克服偏心弹簧25的施力而向锁定方向(在图5中的逆时针方向)转动并向图4所示的锁定位置移动。并且,在锁杆12和打开连杆14向锁定位置移动时,在即将进行该移动之前使位置开关13的检测杆131离开锁杆12的被检测部124,由此检测出锁杆12向锁定位置进行了移动,使马达16的旋转停止。另外,在锁定旋钮lk被进行锁定操作的情况下,锁定旋钮lk的锁定操作经由操作力传递构件24向锁杆12传递,由此锁杆12克服偏心弹簧25的施力而从解锁位置向锁定位置移动。
64.外侧杆18通过朝向前后方向的轴182(参照图1)以能够转动预定角度的方式枢支承于壳体10的下部,并且外侧杆18的车外侧端部经由朝向上下方向的操作力传递构件27连结于外侧把手oh,并且,在车内侧的端部181如上述那样连结有打开连杆14的支承孔141,由此,通过基于外侧把手oh的门打开操作的转动而使打开连杆14向上方移动。
65.如图5所示,在锁杆12和打开连杆14处于解锁位置的解锁状态下,在外侧杆18基于外侧把手oh的门打开操作而转动时,打开连杆14从解锁位置向上方移动,设于打开连杆14的解除部143从下方抵接于打开杆9。由此,掣爪8与打开杆9一起沿打开方向转动,解除掣爪8与闩6之间的卡合而使门能够打开。
66.另外,如图4所示,在锁杆12和打开连杆14处于锁定位置的锁定状态下,在外侧杆18基于外侧把手oh的门打开操作而转动时,打开连杆14从锁定位置向上方移动,该情况下,由于解除部143以横穿打开杆9的前方的方式向上方移动,因此无法使掣爪8沿打开方向转动,无法打开门。
67.内侧杆19通过朝向车内外方向的轴191以能够转动预定角度的方式枢支承于壳体10,内侧杆19的下部经由操作力传递构件28连结于内侧把手ih。由此,内侧杆19基于内侧把手ih的打开操作而从初始位置(图4、图5所示的位置)向打开方向(在图4、图5中的顺时针方向)转动预定角度,从而设于内侧杆19自身的抵接部192自下方抵接于外侧杆18的被抵接部183,使外侧杆18沿打开方向转动,若锁杆12和打开连杆14处于锁定位置,则能够如上述那样地打开门。
68.检测装置20构成为包含支承于壳体10的传递构件21、随着传递构件21的转动而接通、断开的钥匙开关(相当于本发明的检测开关)22以及能够与钥匙杆11的转动连动地进行上下移动的连杆23。此外,检测装置20不一定需要连杆23。例如,在将传递构件21直接连结于钥匙杆11的情况下,能够省略连杆23。
69.并且,本发明的动作传递构造构成为包含传递构件21和钥匙开关22的检测杆221,该检测杆221构成被传递构件,该动作传递构造还能够应用于除检测装置20和汽车用门锁装置以外的装置。
70.钥匙开关22具有:外壳222,其固定于壳体10并且内置有电触点;以及检测杆221,其构成被传递构件,该检测杆221通过旋转轴221a以能够转动预定角度转动的方式枢支承于外壳222。
71.检测杆221始终被省略图示的弹簧保持于图6、图11所示的初始位置(从动初始位置),检测杆221通过从初始位置沿作为一从动方向的顺时针方向转动预定角度,从而检测出锁芯k被进行了解锁操作,检测杆221通过从初始位置沿作为另一从动方向的逆时针方向转动预定角度,从而检测出锁芯k被进行了锁定操作。此外,检测杆221的转动容许范围被设定为预先确定的最大角度。因而,检测杆221实质上无法转动至超过最大角度的位置。
72.连杆23(相当于本发明的“移动构件”)由设于壳体10的引导部103支承为能够沿上下方向进行直线运动,并且上端部231以能够相对于在传递构件21的后端部设置的连结轴部211相对地转动预定角度的方式连结于该连结轴部211,在连杆23的下端部设置的前后方向的长孔232连结于设于内部杆112的连结轴部112b。由此,在内部杆112基于锁芯k的锁定操作或解锁操作而从初始位置沿逆时针方向或顺时针方向转动了的情况下,连杆23从图6、图11所示的初始位置向下方或上方直线移动预定量,由此将该直线移动转换为旋转运动并向传递构件21传递。
73.如图6、图11所示,在传递构件21和连杆23均处于初始位置的情况下,连杆23的上端部231、即连杆23的与传递构件21连结的连结部位处于与设于壳体10的后述的轴102最接近的位置,随着内部杆112沿顺时针方向或逆时针方向转动,连杆23上升或下降,从而连杆23的上端部231以离开轴102的方式移动。
74.传递构件21配置于钥匙开关22的后方附近,通过使设于传递构件21自身的朝向前后方向的长孔212嵌合于位于壳体10且设于钥匙开关22的附近的、朝向车内侧突出的轴102,从而传递构件21被支承为能够沿相对于旋转轴线方向正交的远近方向(图6~图11中的左右方向)移动预定量且能够绕轴102转动预定角度,并且,设于传递构件21的后端部的连结轴部211以能够转动预定角度的方式连结于连杆23的上端部231。此外,在传递构件21处于图6、图11所示的初始位置的情况下,轴102位于传递构件21的长孔212的后端。另外,传递构件21的连结轴部211以能够相对于连杆23的上端部231至少在前后方向上不实质产生
余隙的方式可转动地连结于该上端部231。
75.并且,传递构件21以轴102为界,在接近检测开关22的一侧的前侧具有第1抵接部213、第2抵接部214和容纳部215,在后侧具有用于连结连杆23的连结轴部211。
76.在传递构件21从初始位置沿图6、图11中的作为一驱动方向的逆时针方向(解锁方向)转动的情况下,第1抵接部213从上方抵接于检测开关22的检测杆221,从而使检测杆221以旋转轴221a为中心沿作为一从动方向的顺时针方向旋转。
77.在传递构件21从初始位置沿图6、图11中的作为另一个驱动方向的顺时针方向(锁定方向)转动的情况下,第2抵接部214从下方抵接于检测开关22的检测杆221,从而使检测杆221以旋转轴221a为中心沿作为另一从动方向的逆时针方向旋转。
78.容纳部215处于第1抵接部213与第2抵接部214之间,由图12可知,容纳部215的表面侧被覆盖部215a封闭,容纳部215容纳检测杆221的顶端部和其附近。通过将检测杆221容纳于传递构件21的容纳部215,从而利用覆盖部215a抑制检测杆221的轴线方向上的振动,能够使传递构件21的第1抵接部213和第2抵接部214可靠地抵接于检测杆221。
79.由此,当连杆23基于锁芯k的解锁操作从初始位置上升时,连杆23的上端部231随之向离开轴102的上方移动,因此,传递构件21的连结轴部211相对于轴102向斜后上方移动。由此,传递构件21以轴102为中心从初始位置沿逆时针方向转动并向斜后上方移动。当传递构件21向斜后上方移动时,第1抵接部213的与检测杆221抵接的抵接部位向离开检测杆221的旋转轴221a的方向移动。
80.接下来,根据图6~图13来说明本实施方式的主要部分(钥匙杆11、锁杆12、位置开关13、检测装置20、动作传递构造)的作用。
81.图6是处于锁定状态时的主要部分的侧视图,图7~图10是处于解锁操作状态时的主要部分的侧视图,图11是处于解锁状态时的主要部分的侧视图,图12是图6的xii-xii线剖视图,图13是用于说明主要部分的动作的时刻的时序图。
82.在图6所示的锁定状态下,当锁芯k被进行解锁操作时,该解锁操作经由操作力传递构件r向钥匙杆11的内部杆112传递。内部杆112基于锁芯k的解锁操作从图6所示的初始位置a沿顺时针方向转动,将该转动经由连结连杆15向锁杆12传递,并将该转动经由连杆23向传递构件21传递。
83.首先,如图7所示,当内部杆112从初始位置a转动了角度a1时,连杆23从初始位置b上升移动至位置b1。由此,传递构件21以轴102为支点沿逆时针方向转动并向斜后上方移动,传递构件21的第1抵接部213抵接于钥匙开关22的检测杆221的上表面。
84.此外,在图7所示的状态下,由于在内部杆112的长孔112a的后端与连结连杆15的连结轴151之间存在顺时针方向上的初始余隙,因此,内部杆112的顺时针方向上的初始转动不会传递至锁杆12。另外,由于在传递构件21的第1抵接部213与检测杆221之间也存在初始余隙,因此传递构件21的逆时针方向上的初始转动也不会传递至检测杆221。
85.然后,当随着锁芯k的解锁操作而内部杆112沿顺时针方向进一步转动并转动至图8所示的角度a2时,锁杆12从锁定位置向解锁方向转动,并转动至靠近偏心弹簧25的施力方向上的反转位置(锁定位置与解锁位置之间的中间位置)的位置c。另外,连杆23进一步上升并上升移动至位置b2。
86.如图8所示,当连杆23上升移动至位置b2时,传递构件21以轴102为支点沿逆时针
方向转动并进一步向斜后上方移动。与此相伴,当钥匙开关22的检测杆221以旋转轴221a为中心从初始位置n沿顺时针方向转动至预定角度θ1、即检测位置时,使作为外壳222内的电触点的解锁触点接通,从而钥匙开关22检测解锁。解锁检测信号向车载搭载的省略图示的ecu(electronic control unit)发送。
87.由图13可知,钥匙开关22检测锁芯k的解锁操作的时刻被设定在锁杆12到达了靠近偏心弹簧25的施力方向上的反转位置的位置c的时刻、换言之设定在偏心弹簧25的施力方向发生反转之前。若如此设置,则能够可靠地先于位置开关13的解锁检测地进行钥匙开关22的解锁检测,因此,能够可靠地判断出锁芯k是被合法用户使用钥匙板(日文:
キープレート
)进行了解锁操作,还是因不正当行为而对锁杆12进行了解锁操作。
88.然后,如图9所示,当内部杆112基于锁芯k的解锁操作转动至角度a3时,锁杆12通过偏心弹簧25的施力方向上的反转位置(中间位置)并在偏心弹簧25的解锁方向上的施力的作用下向解锁方向势头良好地转动。通过检测杆131与锁杆12的被检测部124相接触,从而位置开关13检测出锁杆12的解锁位置。另外,随着内部杆112的顺时针方向上的转动,连杆23上升移动至位置b3,并将该移动传递至传递构件21。随着连杆23的上升移动,传递构件21进一步沿逆时针方向转动并向斜后上方移动。随着传递构件21的转动,检测杆221进一步沿顺时针方向转动,并转动至自身的最大转动位置或转动至即将到达该最大转动位置的位置即转动角度θ2的位置。
89.然后,如图10所示,当内部杆112基于锁芯k的解锁操作而转动至角度a4时,锁杆12抵接于第2止挡部105并停止于解锁位置,由此阻止内部杆112的进一步的转动。位置开关13在检测杆131接触于锁杆12的被检测部124的状态下检测出锁杆12已移动至解锁位置。另外,随着内部杆112的顺时针方向上的转动,连杆23上升移动至位置b4并将该移动向传递构件21传递。但是,随着连杆23的上升移动,传递构件21会沿逆时针方向进一步转动,但由于传递构件21向斜后上方进一步移动,因此,第1抵接部213的与检测杆221抵接的抵接部位会向离开检测杆221的旋转轴221a的方向移动,由此,钥匙开关22的检测杆221从图9所示的转动角度θ2的近前位置相反地转动至角度比该近前位置小的转动角度θ3的位置。
90.由此,在钥匙开关22检测出锁芯k的解锁操作之后,即使传递构件21基于锁芯k的解锁方向上的操作而向逆时针方向进一步转动,也不会使检测杆221从检测位置沿顺时针方向大幅过度转动,因此,不会对检测杆221沿顺时针方向施加过度的负荷。因此,钥匙开关22能够提前检测出锁芯k的解锁操作,且能够可靠地防止检测杆221的破损。
91.在锁杆12转动至解锁位置之后,使锁芯k的解锁操作停止,使锁芯k返回初始位置。由此,如图11所示,锁杆12和打开连杆14被保持于解锁位置,钥匙杆11、连杆23、传递构件21和钥匙开关22的检测杆221返回各自的初始位置,从而门锁装置1成为解锁状态。
92.在图11所示的解锁状态下,在锁芯k被进行了锁定操作的情况下,该锁定操作经由操作力传递构件r向钥匙杆11的内部杆112传递,该图示省略。内部杆112基于锁芯k的锁定操作从图11所示的初始位置沿逆时针方向(锁定方向)转动,将该转动经由连结连杆15向锁杆12传递,还经由连杆23向传递构件21传递。
93.当内部杆112沿逆时针方向转动时,连杆23从初始位置b进行下降移动,由此传递构件21以轴102为支点沿顺时针方向转动并向斜后下方移动,传递构件21的第2抵接部214抵接于钥匙开关22的检测杆221的下表面。由此,检测杆221以旋转轴221a为中心沿逆时针
方向转动预定角度,由此锁定侧触点成为接通,钥匙开关22检测出锁芯k的锁定操作。在该情况下,与锁芯k被进行了解锁操作的情况同样地,传递构件21以轴102为支点沿顺时针方向转动并向斜后下方移动,从而不会使钥匙开关22的检测杆221从使锁定侧触点成为接通的检测位置沿顺时针方向大幅过度转动。
94.另外,与传递构件21从初始位置沿逆时针方向进行的转动并行地,锁杆12与内部杆112的逆时针方向上的转动对应地克服偏心弹簧25的施力而从解锁位置向锁定位置移动。在锁杆12转动至锁定位置后,使锁芯k的锁定操作停止,使锁芯k返回初始位置。由此,如图6所示,锁杆12和打开连杆14被保持于锁定位置,钥匙杆11、连杆23、传递构件21和钥匙开关22的检测杆221返回各自的初始位置,门锁装置1成为锁定状态。
95.以上,说明了本发明的一个实施方式,但本发明并不限定于所述实施方式,能够在不脱离本发明的主旨的范围内实施如下那样的变形、变更和组合。
96.(1)对于检测装置20,如图14所示的变形例那样,将所述实施方式中说明的检测装置20中的能够直线运动的所述连杆23变更为能够旋转运动的移动构件29。
97.说明一下该变形例,移动构件29直接连结于锁芯k或经由钥匙杆11等连结于锁芯k,并且移动构件29的前端部291可转动地连结于传递构件21的连结轴部211,以便移动构件29能够与锁芯k的锁定操作对应地从初始位置d起以轴30为中心沿顺时针方向转动预定角度。
98.基于图14的(a)~图14的(e)来说明变形例的动作。此外,在图14的(a)~图14的(e)中,对于具有与所述实施方式相同功能的部位,有时标注与所述实施方式相同的附图标记并省略说明。
99.首先,当与锁芯k的解锁操作对应地使移动构件29从图14的(a)所示的初始位置d沿顺时针方向转动角度d1时,如图14的(b)所示,传递构件21从自身的初始位置e起以轴102为中心沿逆时针方向转动角度e1。由于在传递构件21的第1抵接部213与钥匙开关22的检测杆221之间设定有转动方向上的初始余隙,因此传递构件21的初始转动(角度e1的转动)未传递至检测杆221。此外,图14的(a)相当于所述实施方式中的图6所示的状态,图14的(b)相当于所述实施方式中的图7所示的状态。
100.如图14的(c)所示,当与锁芯k的解锁操作对应地使移动构件29以前端部291能够向上方移动的方式进一步沿顺时针方向转动角度d2时,传递构件21以轴102为中心沿逆时针方向转动角度e2并向斜右上方移动,第1抵接部213从上方抵接于检测杆221。由此,检测杆221从自身的初始位置f起以旋转轴221a为中心沿顺时针方向转动角度f1,使检测开关22的电触点的解锁触点接通。此外,图14的(c)相当于所述实施方式中的图8所示的状态。
101.如图14的(d)所示,当与锁芯k的解锁操作对应地使移动构件29进一步沿顺时针方向转动角度d3时,传递构件21以轴102为中心进一步沿逆时针方向转动角度e3并向斜右上方移动。由此,检测杆221将检测开关22的电触点的解锁触点维持为接通,并以旋转轴221a为中心沿顺时针方向转动比角度f1稍大的角度f2。此外,图14的(d)相当于所述实施方式中的图9所示的状态。
102.如图14的(e)所示,当与锁芯k的解锁操作对应地使移动构件29进一步沿顺时针方向转动并转动至最大角度d4时,传递构件21以轴102为中心进一步沿逆时针方向转动角度e4并向斜右上方移动。但是,随着传递构件21向斜右上方移动,传递构件21的第1抵接部213
的与检测杆221抵接的抵接部位会向离开旋转轴221a的方向移动,因此,检测杆221不会在保持角度f2的状态下沿顺时针方向转动。此外,图14的(e)相当于所述实施方式中的图10所示的状态。
103.(2)使动作传递构造为图15所示的变形例那样的结构。在图15中,附图标记31所示的转动构件相当于本发明的传递构件或所述实施方式的传递构件21,附图标记32所示的被传递构件相当于本发明的被传递构件或所述实施方式的检测杆221。
104.转动构件31被在被传递构件32的附近设置的轴311支承为能够转动预定角度,并以能够与锁芯k、外侧把手oh、内侧把手ih等操作装置的操作对应地以轴311为中心从图15的(a)所示的初始位置g沿顺时针方向或逆时针方向转动的方式连结于操作装置。
105.并且,转动构件31具有:抵接部312,其能够在转动方向上抵接于被传递构件32;以及圆弧部313,其位于转动构件31自身的外周部,该圆弧部313以轴311为中心。
106.被传递构件32被轴321支承为能够转动预定角度转动,并且通过省略图示的弹簧保持于图15的(a)所示的初始位置h。通过将被传递构件32从初始位置h起的转动传递至省略图示的其他杆,从而操作装置的操作经由转动构件31和被传递构件32传递至其他杆。
107.当转动构件31与操作装置的操作对应地从图15的(a)所示的初始位置g例如沿顺时针方向转动预定角度g1时,转动构件31的抵接部312从下方抵接于被传递构件32的臂部322。由此,如图15的(b)所示,被传递构件32从图15的(a)所示的初始位置h向检测位置h1转动。当转动构件31进一步沿顺时针方向转动时,如图15的(c)所示,被传递构件32从检测位置h1沿逆时针方向稍微转动,由此,被传递构件32的臂部322脱离抵接部312并搭在圆弧部313上。然后,即使转动构件31从图15的(c)所示的位置进一步沿顺时针方向转动,被传递构件32的臂部322的顶端部也会在转动构件31的圆弧部313上沿着转动方向相对地移动,因此,被传递构件32不会从检测位置h1沿逆时针方向大幅过度转动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1