一种机器人地刀执行机构调中机构的制作方法
1.本发明涉及一种机器人地刀执行机构调中机构。
背景技术:
2.随着社会的发展机器人应用越来越广泛。其中行走机器人应用在变电站、电力系统领域取得了较大的推广。但现有行走机器人地刀操作结构在操作开关柜的开关时,执行机构有时和开关对准后会相对地刀操作结构发生倾斜,在完成操作后,执行机构没有使其回正的结构,所以应用不灵活。
技术实现要素:
3.为解决上述技术问题,本发明提供一种机器人地刀执行机构调中机构。
4.本发明采用以下技术方案
5.一种机器人地刀执行机构调中机构,包括调中辅助件和传动件,所述调中辅助件一端和传动件一端通过调中机构连接,所述调中机构包括万向节结构和受压弹性件,所述调中辅助件和所述传动件之间通过万向节结构连接,所述万向节结构和调中辅助件之间设有受压弹性件,所述万向节结构和所述传动件之间设有受压弹性件,或者,所述调中辅助件和所述传动件之间设有受压弹性件。
6.可选地,所述受压弹性件为碟簧。
7.可选地,所述调中机构还包括回正件,所述回正件设于所述调中辅助件和所述传动件之间。
8.可选地,所述回正件为滚珠,所述滚珠设于所述调中辅助件和所述传动件之一,所述滚珠和另一个相抵触。
9.可选地,所述回正件为橡胶垫,所述橡胶垫设于所述调中辅助件和所述传动件之一,所述橡胶垫和另一个相抵触。
10.可选地,所述万向节结构包括连接方块,所述调中辅助件一端设有两相对的第一连接部,所述传动件一端设有两相对的第二连接部,两所述第一连接部分别和连接方块相对的两侧面铰接,两所述第二连接部分别和连接方块另外的相对的两侧面铰接。
11.可选地,还包括执行件,所述执行件与所述传动件滑动的连接,所述执行件相对于所述传动件周向相对固定轴向相对滑动,并且所述执行件一端和所述传动件另一端之间设有弹性缓冲件。
12.可选地,所述执行件设有第一孔槽结构,所述第一孔槽结构顶壁具有向内部延伸的斜面。
13.可选地,还包括限位件,所述限位件与所述传动件固定连接,所述限位件具有第一抵挡部,所述执行件具有第二抵挡部,当所述执行件相对于所述传动件运动到固定位置时,所述第一抵挡部抵挡所述第二抵挡部以限制执行件继续运动。
14.可选地,所述执行件和所述传动件之一设有非圆柱体,另一个设有与非圆柱体形
状相配合的滑动孔,所述移动孔和所述传动件之间间隙配合。
15.采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:
16.本发明提供的一种机器人地刀执行机构调中机构,它的调中机构可以使执行机构在操作完开关柜的开关后自动调中、回正。
附图说明
17.图1为本发明操作机器人的总装图;
18.图2为本发明行地刀操作结构的示意图之一;
19.图3为本发明行地刀操作结构的示意图之二;
20.图4为本发明行地刀操作结构的剖视图之一;
21.图5为本发明行伸缩机构的剖视图之一;
22.图6为本发明行执行机构的爆炸图之一;
23.图7为本发明行执行机构的剖视图之一;
24.图8为本发明行压盖组件的示意图;
25.图9为本发明行压盖组件的纵剖图;
26.图10为本发明调正件的示意图;
27.图11为本发明调正件的横剖图;
28.图12为本发明地刀操作结构的示意图之三;
29.图13为本发明伸缩机构的示意图;
30.图14为本发明伸缩机构的剖视图之二;
31.图15为本发明地刀操作结构的示意图之四;
32.图16为本发明地刀操作结构的剖视图之二;
33.图17为本发明进给组件的示意图;
34.图18为本发明执行机构的剖视图之二;
35.图19为本发明执行机构的爆炸图之二;
36.图20为本发明驱动转向机构的示意图;
37.图21为本发明驱动转向机构的剖视图;
38.图22为本发明连接架的示意图;
39.图23为本发明连接架的爆炸图;
40.图24为本发明角度限制结构的示意图;
41.图25为本发明执行机构的示意图;
42.图26为本发明执行机构的剖视图之二;
43.图27为本发明执行机构的爆炸图之二;
44.图28为本发明末端夹持工具的示意图;
45.图29为本发明末端夹持工具的剖视图;
46.图30为本发明末端夹持工具的爆炸图;
47.图31为本发明末端操作工具的示意图;
48.图32为本发明末端操作工具的剖视图;
49.图33为本发明末端操作工具的爆炸图;
50.图34为本发明末端操纵开关工具的示意图;
51.图35为本发明末端操纵开关工具的剖视图;
52.图36为本发明末端操纵开关工具的爆炸图;
53.图37为本发明末端旋拧工具的示意图;
54.图38为本发明末端旋拧工具的剖视图;
55.图39为本发明末端旋拧工具的爆炸图。
56.示意图中的标号说明:
57.1、机架组件;11、外套筒组件;12、第一感应器;13、限制件;14、弹簧线;15、固定架;2、移动底座;21、第二感应器;3、伸缩机构;31、第一电机;32、丝杆;33、进给螺母;34、进给套筒;35、推动件;351、第一滑块;4、执行机构;41、传动件;411、内窥镜;412、第二连接部;42、执行件;421、第二抵挡部;422、移动孔;423、第一孔槽结构;4231、斜面;43、弹性缓冲件;44、限位件;441、第一抵挡部;442、第三感应器;5、压盖组件;51、压盖端;52、调正件;53、第一连接件;54、安装架;6、第一深度相机;7、旋转升降机构;71、第一驱动件;72、第二驱动件;73、底螺母;74、上螺母;75、滚珠丝杆;76、第一感应件;761、挡部;77、第二感应件;8、固定底座;81、第二滑轨;82、第二电机;83、螺杆;84、进给件;9、调中辅助件;91、第一连接部;92、万向节结构;921、连接方块;922受压弹性件;923、滚珠;101、驱动转向机构;1011、固定底盘;102、地刀操作结构;1021、机械臂;
58.a、末端夹持工具;a1、第一固定件;a2、第一动力源;a31、固定主体;a311、滑动孔;a32、第二动力源;a4、夹持件;a41、第四连接件;a412、定位部;a42、穿梭孔;a43、点击开关件;a44、回位弹性件;a45、夹持部;a46、半凹部;a47、夹持孔;a51、第一齿轮;a52、第二齿轮;a53、螺纹杆;a6、第二深度相机;
59.b、末端操作工具;b1、第二固定件;b2、导向套筒;b21、容置孔槽结构;b211、第一段;b212、第二段;b213、第三段;b214、橡胶圈;b3、操作杆;b31、止动件;b4、弹性辅助件;b5、安装件;b51、空腔槽;b6、第三深度相机;
60.c、末端操纵开关工具;c1、第三固定件;c2、马达;c3、传动杆;c31、第一防脱部;c32、凸台;c4、操纵件;c41、回弹件;c42、对接孔槽结构;c421、过渡面;c43、第二防脱部;c5、保护套筒;c6、第四深度相机;
61.d、末端旋拧工具;d1、第四固定件;d2、动力机构;d3、驱动杆;d31、第二阻挡部;d32、弹性缓释件;d33、平台部;d4、套件;d41、第一阻挡部;d42、第一阻位部;d5、旋拧件;d51、规避孔;d52、豁口;d6、固定套筒;d61、第二阻位部;d7、第五深度相机;
62.e1、固定壳;e2、滚动轮;e3、连接架;e31、第二连接件;e32、第三连接件;e33、减震弹性件;e34、预压件;e35、连接部;e36、滑动轨道;e37、滑动块;e4、转向驱动机构;e41、角度约束件;e42、被约束件;e421、缺口;e5、行走驱动机构。
具体实施方式
63.为进一步了解本发明的内容,结合附图1-39及实施例对本发明作详细描述。
64.结合附图1-39,本实施例的机器人,包括驱动转向机构101、地刀操作结构102,驱动转向机构101上面设有固定底盘1011,地刀操作结构102安装在固定底盘1011上。地刀操作结构102包括固定底座8、移动底座2和机架组件1,固定底座8安装在固定底盘1011上,移
动底座2和固定底座8之间滑动的连接,固定底座8设有驱动移动底座2运动的传动机构,机架组件1设于移动底座2,移动底座2设有使机架组件1旋转升降的旋转升降机构7。还包括控制系统,传动机构和控制系统电连接,旋转升降机构7和控制系统电连接。机架组件1设有伸缩机构3,伸缩机构3的末端设有执行机构4。
65.驱动转向机构101包括滚动轮e2、连接架e3、转向驱动机构e4和行走驱动机构e5,转向驱动机构e4设于固定壳e1内,固定壳e1安装在固定底盘1011上。转向驱动机构e4输出轴和连接架e3一端传动连接,连接架e3和固定壳e1轴承连接,连接架e3另一端和行走驱动机构e5固定连接,行走驱动机构e5通过行走驱动电机壳安装于连接架e3,行走驱动机构e5输出轴和滚动轮e2传动连接,并且行走驱动电机壳和滚动轮e2轴承连接,转向驱动机构e4通过连接架e3和行走驱动机构e5驱动滚动轮e2转向,行走驱动机构e5驱动滚动轮e2转动。转向驱动机构e4和控制系统电连接,行走驱动机构e5和控制系统电连接。
66.连接架e3具有悬架机构,连接架e3包括第二连接件e31和第三连接件e32,第二连接件e31和第三连接件e32滑动的连接。第二连接件e31和转向驱动机构e4的输出轴传动连接,第三连接件e32和行走驱动机构e5的行走驱动电机壳固定连接。悬架机构包括设于第二连接件e31和第三连接件e32之间的减震弹性件e33。第二连接件e31和第三连接件e32之间设有使减震弹性件e33压缩的预压结构。预压结构包括设于第二连接件e31和第三连接件e32之一的预压件e34和设于另一个的连接部e35,预压件e34和连接部e35连接,预压件e34和连接部e35连接时,减震弹性件e33为压缩状态。本实施例中,预压件e34为设于第三连接件e32的连接轴,连接部e35为设于第二连接件e31的连接孔,连接轴穿过连接孔,连接轴的端部设有预压螺母,预压螺母和第三连接件e32抵触防止连接轴脱离连接孔。减震弹性件e33为弹簧,减震弹性件e33的一端连接第二连接件e31,减震弹性件e33另一端连接第三连接件e32。第二连接件e31和第三连接件e32通过连接轴和连接孔的配合滑动的连接,使第二连接件e31相对于第三连接件e32轴向相对滑动周向相对固定,使第二连接件e31可通过第三连接件e32传递力矩。减震弹性件e33为压缩状态可以增加减震弹性件e33的刚性,滚动轮e2发生跳动时,减震弹性件e33的弹性变动不会太大防止地刀操作结构102不稳。
67.第二连接件e31和第三连接件e32之一设有滑动轨道e36,另一个设有与滑动轨道e36配合的滑动块e37,第二连接件e31和第三连接件e32通过滑动轨道e36和滑动块e37配合滑动的连接。转向驱动机构e4包括依次连接的旋转驱动电机、减速器和编码器。
68.连接架e3和固定壳e1之间设有限制连接架e3转动角度的角度限制结构。角度限制结构包括角度约束件e41和被约束件e42,角度约束件e41和固定壳e1固定连接,被约束件e42和连接架e3直接或间接固定连接。被约束件e42转动固定角度后和角度约束件e41一侧相互抵挡,被约束件e42反转固定角度后和角度约束件e41另一侧相互抵挡。本实施例中,被约束件e42为圆柱状,被约束件e42一侧具有缺口e421,角度约束件e41部分位于缺口e421内,被约束件e42转动固定角度后,缺口e421的底壁和角度约束件e41一侧抵挡,被约束件e42反向转动固定角度后,缺口e421的底壁与角度约束件e41另一侧抵挡。
69.固定底座8设有第二滑轨81,移动底座2设有与滑轨配合的第二滑块。传动机构包括第二电机82、螺杆83和进给件84。第二电机82和固定底座8固定连接,螺杆83和固定底座8通过轴承连接,进给件84设于移动底座2,进给件84设有与螺杆83配合的螺纹孔,第二电机82通过同步带和同步带轮驱动螺杆83转动。螺杆83转动可驱动移动底座2在第二滑轨81上
滑动。
70.旋转升降机构7包括第一驱动件71、第二驱动件72、底螺母73、上螺母74和滚珠丝杆75,滚珠丝杆75固定于移动底座2,底螺母73和上螺母74均套设于滚珠丝杆75,底螺母73包括第一内圈和第一外圈,第一内圈和第一外圈通过轴承连接,第一内圈套设于滚珠丝杆75外围,第一内圈和滚珠丝杆75键连接,第一内圈相对于滚珠丝杆75仅能做直线运动,第一内圈相对于滚珠丝杆75周向相对固定轴向相对滑动,第一外圈和机架组件1固定连接。上螺母74包括第二内圈和第二外圈,第二内圈和第二外圈轴承连接,第二内圈设有与滚珠丝杆75配合的螺纹,第二外圈和机架组件1固定连接。第一驱动件71和第二驱动件72均安装在机架组件1,第一驱动件71的输出轴和第一内圈同步带传动连接,第二驱动件72的输出轴和第二内圈同步带传动连接。
71.底螺母73和上螺母74均安装于机架组件1。第一驱动件71输出轴固定有同步带轮,底螺母73的第一内圈固定有同步带轮,同步带轮外设有同步带。第二驱动件72输出轴固定有同步带轮,上螺母74的第二内圈固定有同步带轮,同步带轮外设有同步带。通过旋转升降机构7可实现机架组件1旋转运动、直线运动以及直线旋转复合运动。
72.具体的,直线旋转复合运动通过开启第一驱动件71实现。由于第一内圈相对于滚珠丝杆75周向固定,所以第一驱动件71开启会驱动机架组件1围绕滚珠丝杆75转动,机架组件1转动会通过第二驱动件72和第二内圈之间的同步带传动使第二内圈转动,第二内圈转动会带动机架组件1相对于滚珠丝杆75做直线运动。
73.直线运动通过开启第二驱动件72实现。第二驱动件72开启会驱动第二内圈转动,第二内圈转动会带动机架组件1相对于滚珠丝杆75做直线运动。
74.旋转运动通过同时开启第一驱动件71、第二驱动件72实现。由上述可知开启第一驱动件71实现机架组件1的直线旋转复合运动。此时只需要使第二驱动件72反转,且转速和第一驱动件71保持一致,就会使第二内圈处于静止状态,所以机架组件1就不会做直线运动,仅做旋转运动。
75.机架组件1和滚珠丝杆75之间设有用于限制机架组件1旋转角度的限位结构。限位结构包括限制件13和阻挡件,限制件13固定于机架组件1,阻挡件和第一内圈/滚珠丝杆75直接或间接的固定连接,阻挡件设有两挡部761,限制件13限制于两挡部761之间。具体应用时,阻挡件固定于第一内圈的同步带轮。
76.还包括检测机构,检测机构包括第一感应器12和第一感应件76,第一感应器12固定于机架组件1,第一感应件76和第一内圈直接或间接的固定连接,第一感应器12可感应第一感应件76。第一感应器12和控制系统电连接。具体应用时,第一感应件76和阻挡件一体设置。第一感应件76具有一金属件,第一感应件76为可感应金属的传感器,当第一感应器12感应到第一感应件76时,此时机架组件1的位置设为原点位置,然后通过第一驱动件71的编码器确认机架组件1的转动角度。
77.检测机构还包括第二感应器21和第二感应件77,第二感应器21固定于移动底座2,第二感应件77和第一内圈直接或间接的固定连接,第二感应器21可感应第二感应件77。第二感应器21和控制系统电连接。具体应用时,第二感应件77为一金属件,第二感应器21为可感应金属的传感器。当机架组件1移动到最底部时,第二感应件77到达第二感应器21的位置,第二感应器21感应到第二感应件77并将感应信号传输给控制系统。固定底座8设有第四
感应器,移动底座2设有第四感应件,第四感应器可感应第四感应件。具体应用时,第四感应件为一金属件,第四感应器为可感应金属的传感器。当移动底座2移动到固定底座8的最末端时,第四感应件到达第四感应器的位置,第四感应器感应到第四感应件并将感应信号传输给控制系统。
78.伸缩机构3包括设于机架组件1的驱动机构和丝杆副伸缩机构,驱动机构和控制系统电连接。驱动机构包括第一电机31,丝杆副伸缩机构包括丝杠32和与丝杠32配合的进给组件。丝杠32和机架组件1通过轴承连接,第一电机31的输出轴设有同步带轮,丝杠32固定有同步带轮,第一电机31通过同步带和同步带轮驱动丝杠32转动。进给组件和机架组件1滑动的连接,机架组件1包括外套筒组件11,外套筒组件11套设于进给组件外。进给组件包括进给螺母33和进给套筒34,进给螺母33和进给套筒34固定连接,外套筒组件11和进给套筒34键连接,使进给组件和外套筒组件11周向相对固定轴向相对滑动。机架组件1内设有旋转驱动,旋转驱动和控制系统电连接,旋转驱动驱动外套筒组件11转动,进而带动进给套筒34转动,执行机构4设于进给套筒34的末端。
79.机架组件1工作时,通过控制系统控制第一电机31驱动丝杆副伸缩机构伸缩,使执行机构4靠近接触目标操作的开关柜开关,然后,控制系统控制旋转驱动输出轴转动带动执行机构4转动,进而旋转打开开关柜的开关。由于旋转驱动转动时也会带动进给组件转动,会导致进给组件相对于丝杠32移动,为了解决这个问题,只需要控制系统通过第一电机31控制丝杠32反向转动即可。
80.还包括压盖组件5,压盖组件5和进给套筒34轴承连接。通常开关柜的开关设有地刀对接孔挡板,操作开关柜开关前需要把地刀对接孔挡板打开,压盖组件5用于打开开关柜的地刀对接孔挡板。压盖组件5包括压盖端51、第一连接件53、安装架54,第一连接件53一端和压盖端51固定连接,第一连接件53另一端和安装架54固定连接。安装架54和进给套筒34轴承连接。压盖端51为两侧设有侧边的压板,压板的两侧边均设有调正件52,调正件52设有向内延伸的倾斜面。本实施例中,调正件52具有两个倾斜面分别为第一倾斜面521和第二倾斜面522,第一倾斜面521和第二倾斜面522为相邻的两个面。第一倾斜面521和第二倾斜面522均为三角形面。第一倾斜面521和第二倾斜面522衔接处由圆滑的曲面过渡。第一倾斜面521朝向压盖端的前方,第二倾斜面522朝向压盖端的下方。调正件和压板的两侧边之间设有使调正件保持弹出状态的顶出弹性件523,具体应用时,顶出弹性件523为弹簧。
81.压盖端51通过下压打开地刀对接孔挡板。地刀对接孔挡板进入压盖端51时,在压盖端51和地刀对接孔挡板的表面不是相平行的状态下时,或者压盖端51和地刀对接孔挡板稍稍错开时,两调正件的第一倾斜面521/第二倾斜面522和地刀对接孔挡板接触后,随着压盖端51下压第一倾斜面521/第二倾斜面522和地刀对接孔挡板之间产生作用力使压盖组件5相对进给套筒34稍稍发生转动,使压盖端51和地刀对接孔挡板回到相平行的状态,以便于压盖端51精准对接开关柜的地刀对接孔挡板。并且两调正件限制地刀对接孔挡板进入压盖端51的中间位置,以使压盖端51对地刀对接孔挡板施加下压的作用力时稳定。在另一实施方式中,伸缩机构3包括设于机架组件1的驱动机构和丝杆副伸缩机构,驱动机构和控制系统电连接。驱动机构包括第一电机31,丝杆副伸缩机构包括丝杠32和与丝杠32配合的进给组件。第一电机31固定于机架组件1,丝杠32与机架组件1轴承连接,第一电机31和丝杠32传动连接。进给组件包括进给螺母33、推动件35、压盖组件5和进给套筒34,进给螺母33套设在
丝杠32外,进给螺母33和推动件35固定连接,推动件35和压盖组件5固定连接,压盖组件5和进给套筒34轴承连接。机架组件1包括外套筒组件11,外套筒组件11套设在进给套筒34外,进给套筒34和外套筒组件11键连接,外套筒组件11限制进给套筒34仅做直线运动,进给套筒34相对于外套筒组件11周向相对固定轴向相对滑动。
82.机架组件1还包括固定架15,第一电机31安装于固定架15,推动件35和固定架15滑动的连接。固定架15设有第一滑轨,推动件35设有与第一滑轨配合的第一滑块351。压盖组件5包括压盖端51、第一连接件53、安装架54。第一连接件53一端和压盖端51固定连接,第一连接件53另一端和安装架54固定连接,安装架54和进给套筒34通过轴承连接,并且安装架54和推动件35固定连接。压盖端51为两侧设有侧边的压板。第一电机31的输出轴转动通过驱动丝杠32转动,使进给螺母33带动推动件35、压盖组件5和进给套筒34直线运动。由于压盖组件5和推动件35固定连接,所以压盖组件5不会出现相对于进给套筒34发生偏转的情况。由于压盖组件5和进给套筒34轴承连接,所以旋转驱动驱动外套筒组件11转动,带动进给套筒34和执行机构4转动,就不会使进给组件发生移动了。
83.机架组件1设有第五感应器,进给组件设有第五感应件。第五感应件为一金属件,第五感应器为可感应金属的传感器。当进给螺母33在丝杠32的开端时,第五感应件在第五感应器的位置。第五感应件和控制系统电连接,当第五感应件感应到第五感应器的位置时,第五感应件将感应信号传输给控制系统,控制系统判断进给组件已回位。具体应用时,第五感应件设于推动件35,第五感应器设于固定架15。
84.进给套筒34的末端设有执行机构4。执行机构4包括传动件41和执行件42,执行件42一端和传动件41一端滑动的连接,执行件42相对于传动件41周向相对固定轴向相对滑动。执行件42和传动件41之一设有非圆柱体,另一个设有与非圆柱体形状相配合的移动孔422。具体应用时,非圆柱体为正方形柱体,也可以为正五边形柱体,执行件42和传动件41之间也可以键连接。并且执行件42一端和传动件41一端之间设有弹性缓冲件43,具体应用时,弹性缓冲件43为弹簧,弹性缓冲件43套设在非圆柱体上。传动件41另一端和进给套筒34固定连接。执行机构4还包括限位件44,限位件44套设在非圆形柱体上,限位件44一端和传动件41固定连接,限位件44另一端具有第一抵挡部441,执行件42具有第二抵挡部421,当执行件42相对于传动件41运动到固定位置时,第一抵挡部441抵挡第二抵挡部421以防止执行件42脱离限位件44。执行件42另一端用于操作开关柜的开关,执行件42另一端设有与开关配合的第一孔槽结构423,第一孔槽结构423顶壁具有向内部延伸的斜面4231。第一孔槽结构423为六边形孔槽结构。六边形孔槽结构的角部为圆弧曲面过渡衔接角的边面形成的角部。
85.机架组件1设有第一深度相机6,第一深度相机6位于伸缩机构3的上方位置,第一深度相机6和控制系统电连接。第一深度相机6用于采集开关柜开关的位置信息,然后反馈给控制系统。控制系统然后驱动旋转升降机构7、传动机构、伸缩机构3,使第一孔槽结构423靠近开关柜的开关。但是定位可能会出现些许误差,导致第一孔槽结构423和开关柜的开关错开一点。这时,第一孔槽结构423顶壁的斜面4231会帮助开关滑到第一孔槽结构423内。
86.限位件44固定有第三感应器442,第三感应器442可感应执行件42。机架组件1内设有容置空间,容置空间内设置有弹簧线14,进给套筒34为中空结构,进给套筒34或者机架组件1设有供弹簧线14一端穿过的电线孔,弹簧线14一端经过电线孔和第三感应器442电连接,弹簧线14的另一端连接电源。在其他实施方式中,第三感应器442和传动件41固定连接。
具体应用时,执行件42为一金属件,第三感应器442为可感应金属的传感器。当第一孔槽结构423和开关柜的开关错开时,伸缩机构3驱动会使执行件42触碰开关柜的开关受到反向压力,使执行件42相对传动件41滑动后退,弹性缓冲件43受压缩。当执行件42后退到第三感应器442的位置时,第三感应器442感应到执行件42,当第一孔槽结构423和开关柜的开关卡合时,执行件42会突然回位,第三感应器442感应到执行件42离开的信号,将信号反馈给控制系统,控制系统判断第一孔槽结构423和开关柜的开关卡合完成。
87.传动件41设有内窥镜411,执行件42为一筒状结构,内窥镜411通过筒状结构可监控执行件42外的情况。内窥镜411和控制系统电连接,内窥镜411和第一深度相机6用于共同监测开关柜开关的位置。进给套筒34为中空结构,弹簧线14的一端经过中空结构和内窥镜411电连接,弹簧线14的另一端连接电源。
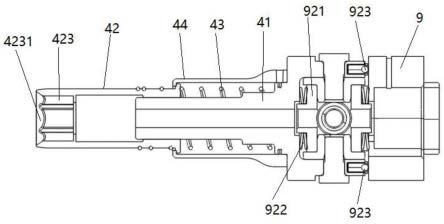
88.在另一实施方式中,执行机构4具有调中结构,执行机构4包括执行件42、传动件41和调中辅助件9。执行件42和传动件41之间的连接方式和上述执行件42和上述传动件41之间的连接结构一致,本实施方式中,传动件41通过调中辅助件9和进给套筒34连接,调中辅助件9和进给套筒34固定连接。传动件41和调中辅助件9之间通过调中结构连接,调中结构包括在传动件41和调中辅助件9之间的万向节结构92、受压弹性件922和回正件。万向节结构92包括连接方块921,调中辅助件9一端设有向外延伸的两相对的第一连接部91,传动件41一端设有向外延伸的两相对的第二连接部412,两第一连接部91分别和连接方块921相对的两侧面铰接,两第二连接部412分别和连接方块921另外的相对的两侧面铰接,使传动件41和调中辅助件9大致在一条直线上。但是由于万向节结构92的设置,传动件41可相对于调中辅助件9发生倾斜。连接方块921和传动件41之间、连接方块921和调中辅助件9之间均设有受压弹性件922。具体应用时,受压弹性件922为碟簧。受压弹性件922为受压缩的状态,受压弹性件922可以使传动件41可相对于调中辅助件9发生倾斜后回正,使传动件41和调中辅助件9恢复到大致在一条直线上的状态。回正件为滚珠923或橡胶垫,回正件安装在第一连接部91的端部并且和传动件41抵触。回正件还安装在第二连接部412的端部,并且和调中辅助件9抵触。回正件有助于传动件41相对于调中辅助件9发生倾斜后回正。万向节结构、传动件41和执行件42的间隙配合形成了执行机构4的双极浮动,使执行机构4可适应偏角
±3°
及偏心
±
1mm的偏移量。
89.还包括机械臂,机械臂安装在固定底盘上,控制系统控制机械臂1021的运动,机械臂1021末端设有四个末端工具,四个末端工具均相对于机械臂1021倾斜设置并且倾斜角度相同,四个末端工具环绕机械臂1021末端周向均匀分布。四个末端工具均相对于机械臂1021倾斜45
°
。四个末端工具两两之间相互垂直。四个末端工具分别为末端夹持工具a、末端操作工具b、末端操纵开关工具c、末端旋拧工具d。
90.末端夹持工具a包括设于机械臂1021的第一固定件a1、安装在第一固定件a1的第一动力源a2、第一执行组件,第一执行组件包括固定主体a31、安装于固定主体a31的第二动力源a32、两夹持件a4,固定主体a31内设有夹持传动结构,第二动力源a32通过夹持传动结构使两夹持件a4之间相互靠近或分离。固定主体a31和第一固定件a1轴承连接,固定主体a31和第一动力源a2的输出轴传动连接,第一动力源a2驱动第一执行组件转动。具体应用时,固定主体a31为固定外壳。
91.夹持传动结构包括齿轮组、螺纹杆a53,齿轮组包括第一齿轮a51、第二齿轮a52,具
体应用时第一齿轮a51和第二齿轮a52均为锥齿轮,第一齿轮a51和第二齿轮a52相互垂直并且相互啮合。齿轮组安装于固定主体a31内,第二动力源a32的输出轴和齿轮组传动连接。第一齿轮a51和第二动力源a32的输出轴同轴固定连接,第二齿轮a52和螺纹杆a53同轴固定连接,螺纹杆a53和固定主体a31转动的连接。两夹持件a4均固定连接有第四连接件a41,第四连接件a41设于固定主体a31内,第四连接件a41设有与螺纹杆a53配合的螺纹孔,两螺纹孔内螺纹的螺旋方向相反。在其他实施方式中,螺纹孔可直接设于夹持件a4。固定主体a31设有供第四连接件a41穿出的滑动孔a311,滑动孔a311限制第四连接件a41仅做直线运动。第四连接件a41设有定位部a412,定位部a412抵住固定主体a31内壁以防止第四连接件a41发生偏转,限制第四连接件a41仅做直线运动。
92.夹持件a4设有穿梭孔a42,穿梭孔a42内设有点击开关件a43,点击开关件a43和夹持件a4之间设有回位弹性件a44。夹持件a4设有向两侧延伸的夹持部a45,两夹持件a4相互靠近时,两夹持件a4的夹持部a45相互抵触。夹持件a4设有半凹部a46,两夹持件a4相互靠近时,两夹持件a4的半凹部a46相互重合组合为完整的夹持孔a47。具体应用时,夹持孔a47为四方孔。还包括第二深度相机a6,第二深度相机a6安装于第一固定件a1。第二深度相机a6安装在固定主体a31的上方位置,第二深度相机a6和控制系统电连接,第二深度相机a6可检测开关柜开关的位置,然后控制系统控制机械臂1021使末端夹持工具a靠近关柜的开关,然后驱动第二动力源a32,使两夹持件a4夹住开关,然后驱动第一动力源a2,使夹持件a4旋转拧开开关。点击开关件a43可在机械臂1021的驱动下点击按钮开关。夹持件a4可夹持方形的开关,也可利用夹持部a45夹持柄状的/长条状的开关。
93.末端操作工具b包括设于机械臂1021的第二固定件b1、固定于第二固定件b1的导向套筒b2、操作杆b3,操作杆b3和导向套筒b2滑动的连接,操作杆b3和导向套筒b2之间设有弹性辅助件b4。弹性辅助件b4和导向套筒b2之间或者弹性辅助件b4和操作杆b3之间设有检测弹簧压力的压力传感器,压力传感器和控制系统电连接。操作杆b3和导向套筒b2之间设有用于限制操作杆b3滑动位置的止动结构。止动结构包括连接在操作杆b3一端的止动件b31和设于导向套筒b2的止动部,当操作杆b3相对于导向套筒b2运动到固定位置时,止动件b31和止动部相抵触以防止操作杆b3脱离导向套筒b2。
94.导向套筒b2设有容置孔槽结构b21,操作杆b3的一端设在容置孔槽结构b21内。容置孔槽结构b21分为第一段b211、第二段b212和第三段b213,第一段b211的尺寸小于第二段b212的尺寸,第二段b212的尺寸小于第三段b213的尺寸。操作杆b3的一端经过第一段b211和第二段b212进入第三段b213。第一段b211的尺寸和操作杆b3的外径尺寸相适应。第二段b212内设有套设在操作杆b3外的橡胶圈b214,橡胶圈b214整个填满第二段b212内的空间。第三段b213内设有止动件b31,止动件b31和操作杆b3的一端固定连接。止动部为橡胶圈b214的底部,止动件b31和止动部配合防止操作杆b3脱离导向套筒b2。第三段b213内设有弹性辅助件b4,弹性辅助件b4为弹簧。第三段b213内设有安装件b5,安装件b5的截面大致为t型结构,安装件b5的一端设在第三段b213内并且具有空腔槽b51,安装件b5的另一端和导向套筒b2固定连接,弹性辅助件b4设在空腔槽b51内。弹性辅助件b4的一端连接止动件b31,弹性辅助件b4的另一端连接空腔槽b51底壁。具体应用时,止动件b31设有压力传感器,压力传感器和弹性辅助件b4抵接。
95.第二固定件b1固定有第三深度相机b6,第三深度相机b6位于导向套筒b2的上方,
第三深度相机b6和控制系统电连接。第三深度相机b6可检测开关柜开关的位置,然后控制系统控制机械臂1021使末端操作工具b靠近开关柜的开关。操作杆b3可点击按钮式的开关,机械臂1021控制操作杆b3点击开关时,压力传感器可感应到弹性辅助件b4受到的压力,即操作杆b3对按钮开关的压力。压力传感器将压力信号传递给控制系统,控制系统可根据压力传感器的感应信号判断操作杆b3点击开关的力度。
96.末端操纵开关工具c包括设于机械臂1021的第三固定件c1、安装于第三固定件c1的马达c2、和马达c2输出轴传动连接的传动杆c3。传动杆c3和第三固定件c1轴承连接。传动杆c3的端部设有操纵件c4,操纵件c4和传动杆c3周向相对固定轴向相对滑动,部分传动杆c3的横截面为非圆形,操纵件c4具有和传动杆c3配合的非圆形的通孔。具体应用时部分传动杆c3的横截面为正方形或正五边形或正三角形,或者操纵件c4和传动杆c3键连接。操纵件c4和传动杆c3之间设有回弹件c41,回弹件c41为弹簧。操纵件c4设有用于对接开关柜开关的对接孔槽结构c42,对接孔槽结构c42为两个重合交错的方体组成的孔槽结构。两个重合交错的方体使对接孔槽结构c42形成八个角部,八个角部周向均匀分布在对接孔槽结构c42内。角部为圆弧曲面过渡衔接角的边面形成的角部。对接孔槽结构c42的端面为向内延伸的倾斜的过渡面c421。
97.传动杆c3和操纵件c4之间设有防止操纵件c4和传动杆c3之间分离的防脱结构。防脱结构包括设于传动杆c3端部的第一防脱部c31和设于操纵件c4的第二防脱部c43,当操纵件c4滑动到传动杆c3端部时,第一防脱部c31和第二防脱部c43相互抵触,以防止操纵件c4脱离传动杆c3。操纵件c4为一筒状结构,操纵件c4套设于传动杆c3外,第一防脱部c31为固定在传动杆c3端部的螺钉,螺钉的尺寸大于传动杆c3的尺寸,第二防脱部c43为设在操纵件c4内的阶梯平台。回弹件c41套设于传动杆c3外,传动杆c3设有向径向方向延伸的凸台c32,回弹件c41的一端连接凸台c32,回弹件c41的另一端连接操纵件c4。还包括用于保护回弹件c41的保护套筒c5,回弹件c41位于保护套筒c5内,保护套筒套c5设在传动杆c3外,保护套筒和凸台c32固定连接。
98.第三固定件c1固定有第四深度相机c6,第四深度相机c6和控制系统电连接。第四深度相机c6位于传动杆c3的上方。第四深度相机c6可检测到开关柜开关的位置,然后将开关柜的位置信号传输给控制系统,控制系统控制机械臂1021使末端操纵开关工具c靠近开关柜的开关。操纵件c4的对接孔槽结构c42可以和开关柜的方形的开关卡合。对接孔槽结构c42对接方形开关发生错位时,倾斜的过渡面c421可帮助对接孔槽结构c42对接方形开关。对接孔槽结构c42具有八个角部,由两个重合交错的方体形成,使方形开关更容易的进入对接孔槽结构c42内。马达c2带动传动杆c3旋转,对接孔槽结构c42任何一个角部接触到方形开关任何一个角,对接孔槽结构c42就会快速的对接到方形开关的其它部分。然后马达c2继续旋转可使操纵件c4拧开开关。
99.末端旋拧工具d包括设在机械臂1021的第四固定件d1、安装在第四固定件d1的动力机构d2、和动力机构d2输出轴传动连接的驱动杆组件,驱动杆组件和第四固定件d1轴承连接,驱动杆组件端部设有旋拧件d5。驱动杆组件包括驱动杆d3、套件d4,套件d4和驱动杆d3周向相对固定轴向相对滑动,套件d4套设于驱动杆d3,驱动杆d3的横截面为非圆形,套件d4设有与驱动杆d3外形相适应的套孔。具体应用时,驱动杆d3的横截面为方形、正五边形或者三角形,或者套件d4和驱动杆d3之间键连接。驱动杆d3和套件d4之间设有弹性缓释件
d32,套件d4和旋拧件d5固定连接。旋拧件d5设有用于规避驱动杆d3的规避孔d51。
100.套件d4和驱动杆d3之间设有限制套件d4滑动位置的挡位结构。挡位结构包括设于套件d4的第一阻挡部d41和设于驱动杆d3的第二阻挡部d31,套件d4相对于驱动杆d3滑动到固定位置时,第一阻挡部d41和第二阻挡部d31相抵挡以防止套件d4脱离驱动杆d3。第四固定件d1固定连接有固定套筒d6,固定套筒d6套设在驱动杆组件外,驱动杆组件和固定套筒d6之间设有轴承。套件d4和固定套筒d6之间设有限制套件d4滑动位置的阻位结构。阻位结构包括设于套件d4的第一阻位部d42和设于固定套筒d6的第二阻位部d61,套件d4相对于驱动杆d3滑动到固定位置时,第一阻位部d42和第二阻位部d61相抵挡以限制套件d4继续运动。套件d4的活动范围被限制在第二阻挡部d31和第二阻位部d61之间。具体应用时,第一阻挡部d41和第一阻位部d42设置为一体结构。
101.弹性缓释件d32套于驱动杆d3,驱动杆d3设有和弹性缓释件d32一端抵接的平台部d33,弹性缓释件d32另一端和套件d4抵接。旋拧件d5为一筒状结构,旋拧件d5的端部周向均匀的设有四个豁口d52,豁口d52两两对称设置。驱动杆d3的端部设有阻挡螺母,阻挡螺母形成了第二阻挡部d31。
102.第四固定件d1固定有第五深度相机d7,第五深度相机d7和控制系统电连接。第五深度相机d7位于驱动杆d3的上方。第五深度相机d7可检测到开关柜开关的位置,然后将开关柜的位置信号传输给控制系统,控制系统控制机械臂1021使末端旋拧工具d靠近开关柜的开关。旋拧件d5的端部的豁口d52可卡合柄状的/长条状的开关,卡合开关之后,然后驱动动力机构d2,使旋拧件d5旋拧开关。有些开关在旋拧后还要进行按压才能打开开关,这是就需要使机械臂1021按压旋拧件d5,这样旋拧件d5会相对于驱动杆d3后退,驱动杆d3端部会按压开关。打开开关之后,弹性缓释件d32可使旋拧件d5回到初始位置。
103.机器人设有双视云台、局放传感器和环境监测传感器。开关室操作机器人具有以下功能:
104.(1)驱动转向机构:采用全向四驱运动底盘,性能可靠、控制灵活,采用高精度无轨自主定位导航,并具备自主避障和防跌落功能,确保作业安全;
105.(2)机械臂:六自由度协作级机械臂,具备自由驱动和碰撞保护功能,实现高精度末端调姿及运动规划,配合专用作业工具进行特定作业任务。
106.(3)末端操作工具:搭载深度相机,通过多工具切换,可实现日常倒闸操作、应急操作、保护信息查看与按键等功能。
107.(4)地刀操作结构:使用多自由度云台平台,配合大扭矩驱动模块,通过3d视觉定位系统,可实现接地刀闸分合操作的能力。
108.(5)双视云台:搭载可见光相机、红外图像传感器,可实现开关柜的日常巡检功能与操作监控功能。
109.(6)局放传感器:利用特高频局放检测技术,实现开关柜的局放检测。
110.(7)环境监测传感器:实现环境温度湿度、有毒有害气体的监测。
111.以上示意性的对本发明及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1