一种真空吸合锁及控制方法与流程
1.本发明涉及门锁领域,特别是一种真空吸合锁及控制方法。
背景技术:
2.电控锁有磁吸锁、插销锁等,目前公共场所使用大量的磁吸锁,其原理是利用电磁铁的吸合力将门吸住,开门时断电,平时关门时处于通电状态,根据吸合力的大小(60kg~200kg)其通电功率(待机功率)为10w~50w,如果按10w计算,一年耗电为10w*24小时*30天*12个月=86.4度电,全国有几百万个磁吸门,由此而每年消耗的电能可达数亿度,如何减少这些空耗对节能减排具有重大意义。
技术实现要素:
3.本发明的目的是利用真空对门或固定在门上的吸合附件进行吸合实现锁门,在待机状态几乎不消耗能源。
4.本发明的技术方案是:一种真空吸合锁,其特征是:至少包括真空吸盘、三通电磁阀、单向阀、真空泵、关门传感器、主控板,三通电磁阀、单向阀依次串接在真空吸盘和真空泵之间的气道上,主控板获得关门传感器的信号后控制三通电磁阀使所述三通电磁阀接通真空吸盘和真空泵之间的气道实现真空吸盘吸合门体或吸合附件的锁门操作;开门时主控板控制三通电磁阀使所述三通电磁阀阻断真空泵的气道,同时所述三通电磁阀的空气气道和真空吸盘连通使真空吸盘的气压和大气压平衡实现开锁操作。
5.所述的真空吸合锁,其特征是:还包括安装在真空吸盘的气道上的真空度传感器,真空度传感器对真空吸盘内的真空度进行测量,如果真空度低于阈值则启动真空泵抽气。
6.一种真空吸合锁,其特征是:至少包括真空吸盘、三通电磁阀、真空缓冲罐、单向阀、真空泵、关门传感器、主控板,三通电磁阀、真空缓冲罐、单向阀依次串接在真空吸盘和真空泵之间的气道上,真空缓冲罐中安装有真空度传感器,当真空缓冲罐中的真空度低于阈值时启动真空泵抽气使真空缓冲罐中的气压保持真空度,主控板获得关门传感器的信号后控制三通电磁阀使所述三通电磁阀接通真空吸盘和真空缓冲罐的气道实现真空吸盘吸合门体或吸合附件的锁门操作;开门时主控板控制三通电磁阀使所述三通电磁阀阻断真空缓冲罐的气道,同时所述三通电磁阀的空气气道和真空吸盘连通使真空吸盘的气压和大气压平衡实现开锁操作。
7.所述的真空吸合锁,其特征是:所述关门传感器是行程开关。
8.所述的真空吸合锁,其特征是:所述关门传感器是磁控开关,在门的相应位置设置永磁体,永磁体随门移动后触发所述磁控开关。
9.所述的真空吸合锁,其特征是:所述关门传感器是磁控开关,在磁控开关相应位置衔铁,在门的相应位置设置永磁体,永磁体随门移动后吸合所述衔铁,所述衔铁被所述永磁体磁化后触发所述磁控开关。
10.所述的真空吸合锁,其特征是:所述关门传感器是气压传感器,所述气压传感器连接在真空吸盘的气道上,当所述气压传感器检测到门压迫真空吸盘时产生的气压上升信号时经主控板处理执行锁门操作。
11.所述的真空吸合锁,其特征是:所述关门传感器是压敏材料,真空吸盘的全部或部分由所述压敏材料制作,当门压迫压敏材料时产生电阻变化,由所述电阻变化引起的电流信号经主控板处理执行锁门操作。
12.所述的真空吸合锁,其特征是:所述压敏材料是导电聚氨酯材料、或导电橡胶、或含碳海绵、或碳素纤维。
13.一种真空吸合锁控制方法,包括步骤:(1)关门传感器获取关门信号;(2)主控板根据关门信号控制三通电磁阀使真空吸盘和真空缓冲罐连通实现吸合锁门;(3)主控板获得开门信号后控制三通电磁阀使真空吸盘和三通电磁阀的空气气道连通致使真空吸盘内的空气和大气压平衡实现开锁,同时三通电磁阀阻断真空缓冲罐的气道。
14.所述的真空吸合锁控制方法,还包括步骤:步骤(1)中的传感器获取关门信号是行程开关闭合或开路。
15.所述的真空吸合锁控制方法,还包括步骤:步骤(1)中的传感器获取关门信号是磁控开关闭合或开路。
16.所述的真空吸合锁控制方法,还包括步骤:步骤(1)中的传感器获取关门信号是压敏材料的电阻变化。
17.所述的真空吸合锁控制方法,还包括步骤:步骤(1)中的传感器获取关门信号是气压传感器的压力变化。
18.本发明的有益效果是:提供一种利用真空对门或固定在门上的吸合附件进行吸合实现锁门的装置,相对于磁吸锁可以节能,而功能上可以达到磁吸锁相同的效果。
附图说明
19.图1为本发明的一个实施例(关门传感器和真空吸盘分离)。
20.图2为本发明的另一个实施例(关门传感器和真空吸盘合一)。
21.图3为本发明的关门传感器采用磁控开关的实施方式。
22.图4为本发明采用永磁体辅助磁吸关门的实施方式。
23.图5为本发明采用图3和图4实施方式的复合实施方式。
24.图6为本发明利用衔铁磁化触发磁控开关的实施方式。
25.图7为发明采用气压传感器作为关门传感器的实施方式。
26.图8为本发明锁门控制流程图。
27.图9为本发明图7实施方式的流程图。
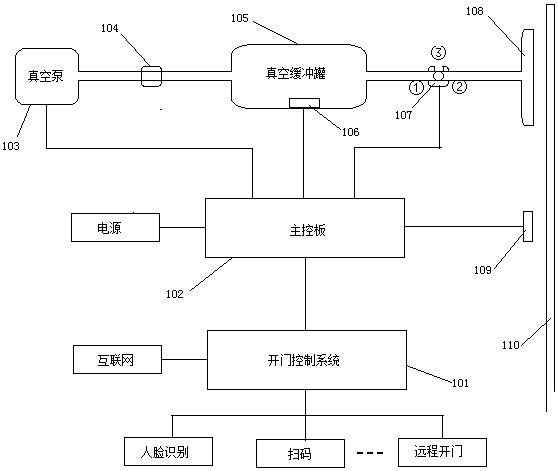
28.图10为在图1实施例基础上的简化实施例。
具体实施方式
29.下面结合附图和实施例对本发明进一步说明。
30.图1为本发明的一个实施例(关门传感器和真空吸盘分离),装置包括真空吸盘108、三通电磁阀107、真空缓冲罐105、单向阀104、真空泵103、关门传感器109、主控板102,另外还包括电源、开门控制系统,开门控制系统可以是人脸识别、或扫描、或远程开门等方式,当然系统可以连接在互联网上。三通电磁阀107、真空缓冲罐105、单向阀104依次串接在真空吸盘108和真空泵103之间的气道上,真空缓冲罐105中安装有真空度传感器106,当真空缓冲罐105中的真空度低于阈值时启动真空泵103抽气使真空缓冲罐105中的气压保持一定的真空度,主控板102获得关门传感器109的信号后控制三通电磁阀107使三通电磁阀107的
①
、
②
气道连通后使真空吸盘108和真空缓冲罐105的气道连通实现真空吸盘108吸合门体110的锁门操作,在这里一般为玻璃门,当然如果是普通门可以增加一个固定在门体上的吸合附件(光滑面)作为真空吸盘108的吸合对象;开门时主控板102控制三通电磁阀107使三通电磁阀107的
①
气道封闭而阻断真空缓冲罐的气道,同时三通电磁阀107的空气气道
③
和
②
气道相通使真空吸盘108内的气压和大气压平衡实现开锁操作。
31.图中的三通电磁阀107优化选型为:断电时
ꢀ①
、
②
为常通气道,此时气道
③
(空气气道)为封闭状态;加电时气道
①
封闭,气道
②
、
③
相通,气道
③
为空气敞开气道。
32.当然,三通电磁阀107也可以选型为:加电时
ꢀ①
、
②
气道连通,此时气道
③
(空气气道)为封闭状态;断电时气道
①
封闭,气道
②
、
③
相通,气道
③
对空气敞开。
33.图中关门传感器109的作用是检测关门状态,可采用任何已知或未知的传感器,最简单的传感器为行程开关,关门时当门体触碰行程开关使行程开关动作,由主控板102获取行程开关的开关信号。
34.目前磁吸锁的锁门吸力为60~200公斤,一个标准大气压为1.01325*10^5pa=101325牛顿/平方米,工程上,1公斤等于9.08665牛顿,所以一个标准大气压为101325/9.08665≈1.121f 11151公斤/平方米,根据p=f/s,假设真空度按0.2个大气压计算,所需真空吸盘面积s=f/p ,换算为厘米为:s=10000*f/11151*0.8=1.121f,s单位为平方厘米,f单位为公斤,如果需要200公斤的吸合力,则s=1.121*200≈224平方厘米。
35.图10为在图1实施例基础上的简化实施例,考虑到去掉真空缓冲罐也是可以实施本发明的,所以赋予权利要求1更大的范围,其特征是:至少包括真空吸盘108、三通电磁阀107、单向阀104、真空泵103、关门传感器109、主控板102,三通电磁阀107、单向阀104依次串接在真空吸盘108和真空泵103之间的气道上,主控板102获得关门传感器109的信号后控制三通电磁阀107使所述三通电磁阀107接通真空吸盘108和真空泵103之间的气道实现真空吸盘108吸合门体110或吸合附件的锁门操作;开门时主控板102控制三通电磁阀107使三通电磁阀107阻断真空泵103的气道,同时三通电磁阀107的空气气道
③
和真空吸盘108连通使真空吸盘108的气压和大气压平衡实现开锁操作。进一步,还包括安装在真空吸盘的气道上的真空度传感器106,真空度传感器106对真空吸盘108内的真空度进行测量,如果真空度低于阈值则启动真空泵103抽气。
36.图2为本发明的另一个实施例(关门传感器和真空吸盘合一),考虑到真空吸盘的吸气动作必须在门体接触到真空吸盘的瞬时就要进行,另外真空吸盘一般由软性材料制成(聚酯材料、橡胶、塑料等),长时间使用存在一定的老化问题,所以将关门传感器安装或融
合在真空吸盘内是一种解决方案,如真空吸盘的全部或部分由压敏材料制作,当门压迫压敏材料时产生电阻变化,由电阻变化引起的电流信号经主控板处理执行锁门操作,压敏材料如:(1)导电橡胶式,它以导电橡胶为敏感元件,当接触外界物体受压后,压迫导电橡胶,使它的电阻发生改变,从而使流经导电橡胶的电流发生变化。(2)含碳海绵式,在基板上装有海绵构成的弹性体,在海绵中按阵列布以含碳海绵,接触物体受压后,含碳海绵的电阻减小,测量流经含碳海绵电流的大小,可确定受压程度。(3)碳素纤维式,以碳素纤维为上表层,下表层为基板,中间装以氨基甲酸酯和金属电极,接触外界物体时碳素纤维受压与电极接触导电。
37.采用压敏改变电阻的传感器还可以参考中国专利2020100939072静电释放制品及应用中描述的:包括环状导电橡胶单元,布置在导电基片上,导电基片接触放电体,在人体静电释放过程中,首先环状导电橡胶的园环边缘接触人体手部,人体静电通过电阻r1进行1次放电,按动所述静电释放制品使环状导电橡胶压扁后导致环状导电橡胶的厚度壁相碰,人体静电通过电阻r2进行2次放电,r1﹥r2,环状导电橡胶直径之间的总电阻值为r1,环状导电橡胶环厚度电阻值为二分之一r2。以及2020100939091一种变阻海绵及其应用描述的:在海绵基材中分散至少2种直径的导电颗粒d1、d2,d2>d1,d1直径的导电颗粒提供所述变阻海绵的常态基础电阻率r1,d2直径的导电颗粒提供所述变阻海绵的压缩状态电阻率r2,r1>r2。采用该描述的技术方案制造的传感器均可以在接触到物体时迅速降低其电阻值。
38.除采用压敏改变电阻的传感器外,换可以采用光电式触碰传感器、电容式触碰传感器。
39.另外可采用,由日本touchence公司推出世界上第一个专为机器人设计的软式触摸传感器,这种传感器是由聚氨酯材料shokac cube制成,能够检测到来自三个层面的接触和压力。
40.图3为本发明的关门传感器采用磁控开关的实施方式,301为磁控开关,如干簧管、霍尔器件等,302为固定在门体110上的永磁体,关门时带动永磁体302靠近磁控开关301使磁控开关301动作,这里磁控开关301动作可以是闭合(常开型)或开路(常闭型),闭合或开路的信号提供给主控板使主控板程序判断关门状态。
41.图4为本发明采用永磁体辅助磁吸关门的实施方式,401为固定在门框合适位置的永磁体,402为相应的固定在门体110上的衔铁,在关门时利用永磁体和衔铁的吸力辅助关门,当然该吸力要小于人的拉力。
42.图5为本发明采用图3和图4实施方式的复合实施方式,在永磁体401和衔铁402组成的辅助磁吸关门的助力下,永磁体302可以很可靠地实现和磁控开关301的接近触发,进一步保证了关门传感的稳定性。
43.图6为本发明利用衔铁磁化触发磁控开关的实施方式,衔铁402和磁控开关301安装在一起,当关门时永磁体302靠近衔铁402,一方面永磁体302和衔铁402实现辅助磁吸关门,当永磁体302和衔铁402吸合时衔铁402随即被磁化,磁化的衔铁402触发磁控开关301动作,如此可以保证在门关好后真空吸盘开始进行吸合,保证吸合效力。
44.图7为发明采用气压传感器作为关门传感器的实施方式,701为气压传感器,结合图9,当气压传感器检测到气压值﹥大气压时说明门体已经开始挤压真空吸盘,此时主控板发出指令使电磁阀动作。
45.图8为本发明锁门控制流程图。
46.上述应用模式及规则均不限定本发明的方法及系统的基本特征,并非限定本发明的保护范围,凡在本发明的精神和原则之内,作出的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1