一种乏燃料干法贮存混凝土模块容器限位装置安装工具的制作方法
1.本技术属于核电站技术领域,具体涉及一种乏燃料干法贮存混凝土模块容器限位装置安装工具。
背景技术:
2.核电站在持续发电运行过程中会不断产生乏燃料组件,而核电站在建设初期修建的用于存储乏燃料的乏池容积有限,为了保证核电站机组能够正常运行,核电站需要定期将乏燃料水池中燃烧过的乏燃料组件转运出去,使乏燃料水池存在足够的容积用于贮存新产生的乏燃料。
3.乏燃料贮存应用较为成熟的方法包括干法与湿法两种,目前国内核电站主要采用乏燃料干法贮存操作工艺对乏燃料组件进行干法贮存。随着国内核电行业逐步引进、消化吸收并推行乏燃料干法贮存工艺,乏燃料干法贮存工艺设备的操作、维护、保养、校正变得尤为重要。
4.在乏燃料干法贮存工艺实施过程中,首先需将装有密封贮存容器的转运容器放到乏燃料水池底部,再通过换料机依次抓取31根乏燃料组件,然后用机械手将乏燃料水池中的乏燃料组件抓取至密封贮存容器内部的乏燃料贮存格架中,接着将其装入密封贮存罐内。接着将屏蔽塞放入密封贮存罐内,并将内盖板与外盖板放入内部并依次进行焊接操作,最后将密封贮存罐运至干法贮存场地存放于混凝土模块(hsm)中。
5.在干法贮存工艺实施过程中,当密封储存罐推入hsm,为防止密封储存罐在hsm内部的移动,需设置容器限位装置。现阶段,容器限位装置人员需要接近并进行安装,人员需要登上梯子,将身体大部分面积暴露在hsm门的门口,由于密封储存罐内装载了未充分耗尽的乏燃料组件,其放射性水平约为60msv/h,hsm门口处于高剂量辐射区域,此时工作人员会产生较大心理压力,存在较大人员受伤以及工作失误的风险。
技术实现要素:
6.本技术目的是提供一种乏燃料干法贮存混凝土模块容器限位装置安装工具,解决现阶段人员需要登上梯子安装容器限位装置,将身体大部分面积暴露在hsm门的门口,而hsm门口处于高剂量辐射区域,工作人员会产生较大心理压力,存在较大人员受伤以及工作失误的风险的问题。
7.实现本技术目的的技术方案:
8.本技术提供了一种乏燃料干法贮存混凝土模块容器限位装置安装工具,包括:底座、悬臂、控制组件和抓手;
9.所述悬臂的一端与所述底座固定,所述悬臂的另一端固定有所述抓手;
10.所述悬臂,用于将所述抓手送至混凝土模块的限位卡座上方;
11.所述控制组件与所述抓手连接,用于控制所述抓手的抓取和释放;
12.所述抓手,用于抓取容器限位装置,并将所述容器限位装置放置在所述限位卡座
内部。
13.可选的,
14.所述控制组件,还用于控制所述悬臂动作,以将所述抓手送至混凝土模块的限位卡座上方。
15.可选的,所述安装工具,还包括:转盘;
16.所述悬臂的一端通过所述转盘与所述底座固定。
17.可选的,所述控制组件,包括:控制器、控制电缆、第一电机、第二电机和钢丝力臂;
18.所述控制器、所述第一电机和所述第二电机均位于所述底座内部的控制箱内;
19.所述控制器通过所述控制电缆与所述第一电机和所述第二电机连接;
20.所述第一电机通过所述钢丝力臂与所述抓手连接;所述第二电机连接所述转盘;
21.所述控制器,用于控制所述第一电机动作,以使所述第一电机通过所述钢丝力臂带动所述抓手抓取或释放;还用于控制所述第二电机动作,以使所述转盘旋转。
22.可选的,所述底座上设置有万向轮;
23.所述控制组件还与所述万向轮连接,用于控制所述万向轮转动以使所述安装工具移动。
24.可选的,所述底座的前侧设置有红外传感器;
25.所述控制组件还与所述红外传感器连接,用于接收所述红外传感器反馈的数据,并根据所述反馈的数据控制所述万向轮锁紧。
26.可选的,所述抓手采用防滑材料制作。
27.可选的,所述安装工具,还包括:遥控器;
28.所述遥控器与所述控制组件遥控连接,用于通过所述遥控器操作所述控制组件控制所述抓手的抓取和释放。
29.本技术的有益技术效果在于:
30.(1)本技术提供了一种乏燃料干法贮存混凝土模块容器限位装置安装工具,通过设计可移动底座对悬臂的位置进行调整直至放置在指定位置,方便抓手抓取限位装置;通过旋转悬臂,可使抓手的位置调整至限位卡座的正上方;通过钢丝力臂可使抓手下降至限位卡座正上方,此时对抓手进行张开或锁紧操作,即可使限位装置落座于限位卡座内部;通过远程对抓手装置进行控制,能够减少人员接近高剂量区域所受到的辐射照射剂量,大大减少了工作人员的辐射剂量,满足辐射防护最优化原则。
31.(2)本技术提供了一种乏燃料干法贮存混凝土模块容器限位装置安装工具,采用电控装置控制钢丝抓手,能够保证容器限位装置安全停留在抓手上,且电控装置易于维修,减少了设备的维修成本。
附图说明
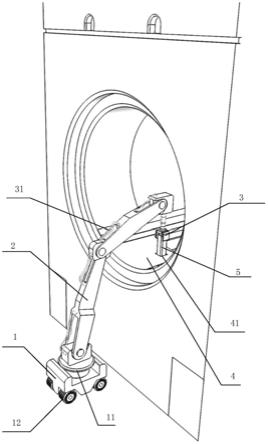
32.图1为本技术实施例提供的一种乏燃料干法贮存混凝土模块容器限位装置安装工具的结构示意图;
33.图2为本技术实施例提供的另一种乏燃料干法贮存混凝土模块容器限位装置安装工具的结构示意图;
34.图3为本技术实施例提供的一种乏燃料干法贮存混凝土模块容器限位装置安装工
具中遥控器的结构示意图。
35.图中:
36.1-底座;11-转盘;12-万向轮;13-红外传感器;
37.2-悬臂;
38.3-抓手;31-钢丝力臂;
39.4-混凝土模块;41-限位卡座;
40.5-容器限位装置;
41.6-遥控器;61-左摇杆;62-小车控制按钮;62-手柄开关;64-控制天线;
42.65-悬臂控制按钮;66-右摇杆;67-万向轮锁紧按钮;68-抓手控制按钮。
具体实施方式
43.为了使本领域的技术人员更好地理解本技术,下面将结合本技术实施例中的附图对本技术实施例中的技术方案进行清楚-完整的描述。显而易见的,下面所述的实施例仅仅是本技术实施例中的一部分,而不是全部。基于本技术记载的实施例,本领域技术人员在不付出创造性劳动的情况下得到的其它所有实施例,均在本技术保护的范围内。
44.为了解决现有技术问题,本技术实施例提供一种乏燃料干法贮存混凝土模块容器限位装置安装工具,前端利用抓手对限位装置进行取放,通过底部托盘固定于hsm侧面,能够有效的降低人员受照射剂量,简化操作流程,确保人员的辐射水平能够在合理可行尽量低的水平。
45.基于上述内容,为了清楚、详细的说明本技术的上述优点,下面将结合附图对本技术的具体实施方式进行说明。
46.参见图1和图2,该图为本技术实施例提供的一种乏燃料干法贮存混凝土模块容器限位装置安装工具的结构示意图。
47.本技术实施例提供的一种乏燃料干法贮存混凝土模块容器限位装置安装工具,包括:底座1、悬臂2、控制组件(未在图中示出)和抓手3;
48.悬臂2的一端与底座1固定,悬臂2的另一端固定有抓手3;
49.悬臂2,用于将抓手3送至混凝土模块4的限位卡座41上方;
50.控制组件与抓手3连接,用于控制抓手3的抓取和释放;
51.抓手3,用于抓取容器限位装置5,并将容器限位装置5放置在限位卡座41内部。
52.在本技术实施例一些可能的实现方式中,控制组件,还用于控制悬臂2动作,以将抓手3送至混凝土模块4的限位卡座41上方。
53.作为一个示例,该安装工具,还可以包括:转盘11;
54.悬臂2的一端通过转盘11与底座1固定。
55.在本技术实施例中,通过一个底座1对悬臂2进行固定,并在固定底座1上部安装转盘11使得悬臂2进行旋转,悬臂2下方设置一个抓手3对容器限位装置5进行抓取和放置,保证了工作人员的安全,减少了人员集体辐射剂量。在一个例子中,底座1和悬臂2均采用不锈钢制作,使其有良好的防腐性能。
56.在本技术实施例一些可能的实现方式中,控制组件,具体可以包括:控制器(未在图中示出)、控制电缆(未在图中示出)、第一电机(未在图中示出)、第二电机(未在图中示
出)和钢丝力臂31;
57.控制器、第一电机和第二电机均位于底座1内部的控制箱内;
58.控制器通过控制电缆与第一电机和第二电机连接;
59.第一电机通过钢丝力臂31与抓手3连接;第二电机连接转盘11;
60.控制器,用于控制第一电机动作,以使第一电机通过钢丝力臂31带动抓手3抓取或释放;还用于控制第二电机动作,以使转盘11旋转。
61.在本技术实施例中,使用第一电机以及钢丝力臂31对抓手3进行控制,保证使用抓手3抓取定位销时,定位销能够安全稳固的停留在抓手3上。工作人员通过悬臂2调整抓手3位置至指定区域,当工作人员在远处确认抓手3抓取的容器限位装置5在hsm限位卡座41正上方时,对抓手3进行缩放,使其落座于限位卡座41内部,完成限位销放置工作。
62.作为一个示例,抓手3采用防滑材料制作。本技术实施例对防滑材料的具体材质不进行限定,本领域技术人员可以根据实际需要选取,这里不再一一列举。
63.在本技术实施例一些可能的实现方式中,如图1和图2所示,底座11上设置有万向轮12;
64.控制组件还与万向轮12连接,用于控制万向轮12转动以使安装工具移动。
65.作为一个示例,万向轮12的数量为4个,万向轮12带自锁装置。在底座1上安装4个带自锁装置万向轮12,使用控制组件驱动,这样既可以控制燃料干法贮存混凝土模块容器限位装置安装工具移动其位置,也保证了工作人员的安全,减少了人员集体辐射剂量。
66.在本技术实施例一些可能的实现方式中,为了防止碰撞,保证将抓手3送至混凝土模块4的限位卡座41上方,如图2所示,底座1的前侧设置有红外传感器13;
67.控制组件还与红外传感器13连接,用于接收红外传感器13反馈的数据,并根据反馈的数据控制万向轮12锁紧。
68.在一个例子中,移动底座由4个带自锁的万向轮12和控制组件还包括控制器以及异步驱动电机,控制器将信号转变为电能输送至异步驱动电机,再由异步驱动电机将电能转化为机械能输送至万向轮12,从而控制底座1移动和万向轮12的自锁。
69.可以理解的是,当底座1前端红外线感应器13采集到底座1距离障碍物小于某一设定值时,控制组件控制万向轮12自动减速并锁紧,防止容器限位装置5受到碰撞或者因底座1未移动到指定位置而掉落至hsm内,导致工作人员需手动拾取容器限位装置5,产生照射风险。
70.在本技术实施例一些可能的实现方式中,如图3所示,该乏燃料干法贮存混凝土模块容器限位装置安装工具,还包括:遥控器6;
71.遥控器6与控制组件遥控连接,用于通过遥控器6操作控制组件控制抓手的抓取和释放。
72.作为一个示例,遥控器6上设置有四个按钮分别为抓手控制按钮68、悬臂控制按钮65、万向轮锁紧按钮67和小车控制按钮62。当按下小车控制按钮62时,遥控器6开启小车控制模式,左摇杆61控制底座1前进方向,右摇杆66控制底座1油门;当按下悬臂控制按钮65时,当遥控器6开启悬臂控制模式,左摇杆61控制悬臂2水平方向旋转,右摇杆66控制悬臂2垂直方向伸缩;当按下抓手控制按钮67时,遥控器6开启抓手控制模式,右摇杆66控制抓手3伸缩,左摇杆62控制抓手3松开或者锁紧;当按下万向轮锁紧按钮67时,万向轮12锁紧。
73.上面结合附图和实施例对本技术作了详细说明,但是本技术并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本技术宗旨的前提下作出各种变化。本技术中未作详细描述的内容均可以采用现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1