用于下肢外骨骼实时人机主导切换协同控制的方法与系统
1.本发明涉及下肢外骨骼技术领域,具体地,涉及一种用于下肢外骨骼实时人机主导切换协同控制的方法与系统。
背景技术:
2.下肢外骨骼机器人近年来得到了大力的发展,在生活中被广泛应用。下肢外骨骼机器人融合机器人技术和传感器技术等,可以帮助部分残疾者进行康复训练和在工作和生活中帮助体力劳动者搬卸重物,以减轻劳动者的负担、减缓劳动者的疲劳程度和提高他们的工作效率。
3.面对急切的社会需求、庞大的社会群体,国内外许多学者均对可穿戴式刚性外骨骼机器人做过大量有益的探索和研究,但是可穿戴刚性外骨骼机器人发展到现在,仍然有许多不足和可进步的空间。传统的下肢外骨骼机器人,在使用时许多是通过给下肢外骨骼预先设定轨迹,然后穿戴者按照外骨骼机器人的运动轨迹来运动,从而完成康复训练,即被动康复训练,但在很多时候,穿戴者想要按照自己的意图完成康复训练,下肢外骨骼机器人只是起到一个辅助训练的目的,即主动康复训练。因此发明一种用于下肢外骨骼实时人机协同控制的方法与系统,实现人机主导协同控制,通过实时改变外骨骼人机顺应模式,使得穿戴者可以实时进行主动康复训练和被动康复训练的切换,具有很大的意义和作用。
4.专利文献cn112060056a(申请号:cn202010893141.6)公开了一种电机与外骨骼下肢重心共线的外骨骼机器人及控制方法。包括背架机构和两组下肢机构,下肢机构包括髋关节传动机构、大腿机构、膝关节传动机构、小腿机构;膝关节传动机构包括电机、一组斜齿轮传动机构、一组行星轮系减速机构,电机通过联轴器与斜齿轮组连接进行传动,斜齿轮组和行星轮系的太阳齿轮同轴相连,从而连接行星轮系进行传动。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种用于下肢外骨骼实时人机主导切换协同控制的方法与系统。
6.根据本发明提供的用于下肢外骨骼实时人机主导切换协同控制的方法,包括:
7.步骤1:实时采集来自传感器的交互力;
8.步骤2:根据交互力对人主导轨迹和外骨骼主导轨迹进行规划;
9.步骤3:通过控制器分别控制人主导轨迹和外骨骼主导轨迹;
10.步骤4:通过控制电机进行实时人机主导切换协同控制。
11.优选的,通过设定交互力阈值,将实时采集到的交互力与交互力阈值进行比较,若交互力大于交互力阈值,则表明此时人倾向于主导该交互力对应部位的运动,否则此时为外骨骼倾向于主导该交互力对应部位的运动。
12.优选的,所述外骨骼主导轨迹是预先为外骨骼规划的轨迹;所述人主导轨迹无法预先设定,交互力越大,表明人期望主导轨迹与实际轨迹偏差越大,力传感器采集到的交互
力大小的程度反映人的意愿的强烈程度;
13.因此,交互力表达为:force=kf(d-dh),其中:d为实际轨迹,dh为人期望主导轨迹,kf为增益矩阵。
14.优选的,所述控制器包括控制器1和控制器2,分别用于控制人主导轨迹和外骨骼主导轨迹;
15.通过设计不同的代价函数和哈密顿函数,利用哈密顿函数分别求解出用最小化代价函数表示的控制器,然后采用径向基神经网络逼近该最小化代价函数,最后得到控制器1和控制器2。
16.优选的,所述力传感器包括安装在左大腿、右大腿、左小腿和右小腿的四个力传感器,用于实时采集这四个部位的交互力;其中力传感器安装在小腿/大腿与腿部固定装置之间,当人倾向于主导运动时产生拉力;
17.所述控制电机包括左髋部电机、右髋部电机、左膝部电机和右膝部电机,其中左髋部电机控制左大腿部位的运动、右髋部电机控制右大腿部位的运动、左膝部电机控制左小腿部位的运动、右膝部电机控制右小腿部位的运动。
18.根据本发明提供的用于下肢外骨骼实时人机主导切换协同控制的系统,包括:
19.模块m1:实时采集来自传感器的交互力;
20.模块m2:根据交互力对人主导轨迹和外骨骼主导轨迹进行规划;
21.模块m3:通过控制器分别控制人主导轨迹和外骨骼主导轨迹;
22.模块m4:通过控制电机进行实时人机主导切换协同控制。
23.优选的,通过设定交互力阈值,将实时采集到的交互力与交互力阈值进行比较,若交互力大于交互力阈值,则表明此时人倾向于主导该交互力对应部位的运动,否则此时为外骨骼倾向于主导该交互力对应部位的运动。
24.优选的,所述外骨骼主导轨迹是预先为外骨骼规划的轨迹;所述人主导轨迹无法预先设定,交互力越大,表明人期望主导轨迹与实际轨迹偏差越大,力传感器采集到的交互力大小的程度反映人的意愿的强烈程度;
25.因此,交互力表达为:force=kf(d-dh),其中:d为实际轨迹,dh为人期望主导轨迹,kf为增益矩阵。
26.优选的,所述控制器包括控制器1和控制器2,分别用于控制人主导轨迹和外骨骼主导轨迹;
27.通过设计不同的代价函数和哈密顿函数,利用哈密顿函数分别求解出用最小化代价函数表示的控制器,然后采用径向基神经网络逼近该最小化代价函数,最后得到控制器1和控制器2。
28.优选的,所述力传感器包括安装在左大腿、右大腿、左小腿和右小腿的四个力传感器,用于实时采集这四个部位的交互力;其中力传感器安装在小腿/大腿与腿部固定装置之间,当人倾向于主导运动时产生拉力;
29.所述控制电机包括左髋部电机、右髋部电机、左膝部电机和右膝部电机,其中左髋部电机控制左大腿部位的运动、右髋部电机控制右大腿部位的运动、左膝部电机控制左小腿部位的运动、右膝部电机控制右小腿部位的运动。
30.与现有技术相比,本发明具有如下的有益效果:
31.(1)本发明通过在下肢外骨骼安装力传感器进行实时采集交互力,将交互力与阈值进行比较判断主导模式,可以实现类似于左大腿是人主导但左小腿是机器主导的模式,避免单一主导的情况;
32.(2)在本发明中采用拉力即交互力来设定人主导轨迹,能通过交互力大小反映人的意愿程度;
33.(3)本发明中设计不同的代价函数和哈密顿函数用于人主导轨迹时的控制器1和外骨骼主导轨迹时的控制器2,解决了力的权重和位置误差的权重不同带来的问题。
附图说明
34.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
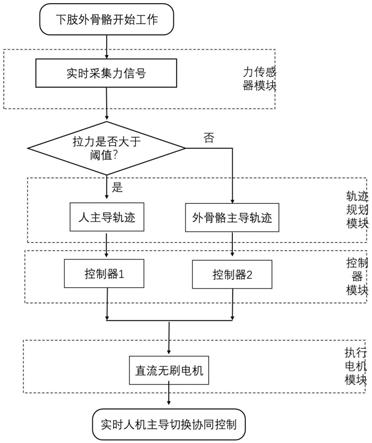
35.图1为本发明所述的实时人机主导切换协同控制的工作示意图;
36.图2为本发明的下肢外骨骼应用场景示意图;
37.图3为本发明所述的力传感器安装局部示意图。
具体实施方式
38.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
39.实施例:
40.如图1,本发明提供了一种用于下肢外骨骼实时人机主导切换协同控制的系统,包括力传感器模块、轨迹规划模块、控制器模块和执行电机模块,通过力传感器实时采集交互力,判断是人处于主导地位还是下肢外骨骼机器人处于主导地位,然后实时进行人机主导模式切换,通过对人主导和外骨骼主导模式分别设计控制器,来达到该实时人机主导切换协同控制的方法与系统。
41.如图2、图3,所述力传感器模块包括安装在左大腿、右大腿、左小腿和右小腿的四个力传感器,用于实时采集这四个部位的交互力。其中力传感器安装在小腿(大腿)与腿部固定装置之间,当人倾向于主导运动时,会产生图示的拉力。
42.考虑到当下肢外骨骼工作时,对于左大腿、左小腿、右大腿、右小腿分别可以有人主导或机器主导,通过这种安装形式,可以分别采集这四个部位的交互力,从而实现对单个部位也可以进行人主导与机器主导的实时切换。
43.本发明通过设定交互力阈值,通过将实时采集到的四个部位的交互力分别与交互力阈值进行比较,如果对应部位交互力大于阈值,说明此时人倾向于主导该部位的运动,否则此时为外骨骼倾向于主导该部位的运动。
44.考虑到力传感器测量的数值有抖动,所以在本发明中设置交互力阈值,只有交互力大于阈值才能判断人倾向于主导该部位的运动。通过这一步,确定了对于左大腿、左小腿、右大腿、右小腿这四个部位分别对应是人主导还是外骨骼主导,为后续根据轨迹规划模块和控制器模块等完成实时人机主导切换协同控制做准备。
45.所述轨迹规划模块包括人主导轨迹和外骨骼主导轨迹。其中外骨骼主导轨迹是预先为外骨骼规划好的轨迹,而人主导轨迹无法预先设定,但交互力越大,说明人期望主导轨迹与实际轨迹偏差较大,设交互力force=kf(d-dh),其中d为实际轨迹,dh为人期望主导轨迹,kf为增益矩阵。力传感器采集到的交互力大小的程度反映了人的意愿,所以设定人主导轨迹为交互力。
46.所述控制器模块包括控制器1和控制器2,其中控制器1用于人主导轨迹时、控制器2用于外骨骼主导轨迹时,对于控制器1和控制器2的设计,通过设计不同的代价函数和哈密顿函数,利用哈密顿函数分别求解出用最小化代价函数表示的控制器,然后采用径向基神经网络逼近该最小化代价函数,最后即可得到控制器1和控制器2。
47.控制器的设计步骤如下:
48.下肢外骨骼的动力学方程写成状态方程形式为:
[0049][0050]
其中:x=[x1,x2],x1为位置误差,x2为滑模误差,μ为控制输入,v为控制输入,force为交互力,g
+
(x)为g(x)摩尔-彭罗斯伪逆。
[0051][0052][0053]
其中:m为惯性矩阵、c为向心力矩和科氏力矩、g为重力力矩,这些都可以针对特定的下肢外骨骼,计算得到。
[0054]
定义代价函数为:
[0055][0056]
其中:q1、q2、r分别为误差的权重矩阵、交互力的权重矩阵和控制输入的权重矩阵;k为正的常数。
[0057]
定义f=x(τ)
t
q1x(τ)+force(τ)
t
q2force(τ)
[0058]
u=μ(x(τ))
t
rμ(x(τ))+k2v(x(τ))
t
v(x(τ))
[0059]
定义哈密顿函数为:
[0060][0061]
定义最小代价函数为j*(x)=min j(x)
[0062]
则此时有
[0063]
令得到:
[0064]
对于最小代价函数为j
*
的求解,利用径向基神经网络来逼近该最优解:令j
*
(x)近
似为则
[0065]
其中,为权重向量,σ(x)为激活函数。
[0066]
则此时哈密顿函数近似为:
[0067][0068]
μ、v近似为:
[0069][0070][0071]
定义哈密顿函数之间的误差为:通过迭代训练更新权重向量使得errorh最小。
[0072]
定义权重更新率为:
[0073][0074]
其中a、b为常数。
[0075]
当时,c=1,否则为0。
[0076][0077]
在每一个训练步长dt时间内,更新公式为:通过不断训练使得误差x近似为0。此时即可得到设计的控制器。
[0078]
对于控制器1和控制器2分别为人主导轨迹时使用、外骨骼主导轨迹时使用,在利用上述方法求解控制器时,对于控制器1,设置q1小于q2,此时求解出来的控制器即为控制器1;对于控制器2,设置q1大于q2,此时求解出来的控制器为控制器2。
[0079]
所述执行电机模块包括左髋部电机、右髋部电机、左膝部电机和右膝部电机,其中左髋部电机控制左大腿部位的运动、右髋部电机控制右大腿部位的运动、左膝部电机控制左小腿部位的运动、右膝部电机控制右小腿部位的运动。
[0080]
通过前述步骤,外骨骼在工作中,四个力传感器实时检测对应的交互力。当某时刻检测到左大腿的交互力大于阈值时,此时表明穿戴者倾向于主导左大腿轨迹,此时利用设计的控制器1,控制左大腿的轨迹跟着穿戴者的轨迹运动。由于不同部位的交互力都是实时检测的,所以当外骨骼工作时,通过本发明可以达到实时人机主导切换协同控制。
[0081]
在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0082]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系
统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
[0083]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1