一种远程控制地质测绘自走机器人的方法及系统与流程
1.本发明是关于地质测绘技术领域,特别是关于一种远程控制地质测绘自走机器人的方法及系统。
背景技术:
2.目前部分地质测绘已经由自走机器人进行,而科研人员很多时候已经不需要进行实地测绘,而是可以通过操作机器人控制器的方式来控制自走机器人进行地质测绘,这种方式大大降低了人员伤亡的风险,并且扩大了地质测绘的测绘范围、提高了测绘精度。目前机器人控制器与自走机器人的信息传输方式是依靠自建的无线局域网进行,那么如何提升该局域网的传输效率决定了自走机器人的控制精度。
技术实现要素:
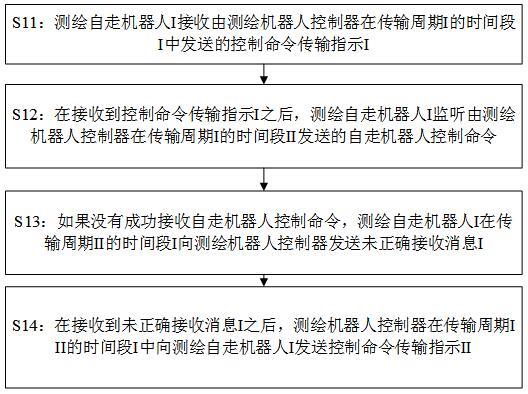
3.为实现上述目的,本发明提供了一种远程控制地质测绘自走机器人的方法,方法包括:测绘自走机器人i接收由测绘机器人控制器在传输周期i的时间段i中发送的控制命令传输指示i,其中,控制命令传输指示i向测绘自走机器人i指示传输周期i的时间段ii;在接收到控制命令传输指示i之后,测绘自走机器人i监听由测绘机器人控制器在传输周期i的时间段ii发送的自走机器人控制命令,其中,控制命令传输指示i包含的比特数小于自走机器人控制命令包含的比特数;如果没有成功接收自走机器人控制命令,测绘自走机器人i在传输周期ii的时间段i向测绘机器人控制器发送未正确接收消息i,其中,在时间上,传输周期ii是传输周期i之后的第一个传输周期;在接收到未正确接收消息i之后,测绘机器人控制器在传输周期iii的时间段i中向测绘自走机器人i发送控制命令传输指示ii,其中,传输周期iii与传输周期i之间间隔传输周期ii,其中,控制命令传输指示ii向测绘自走机器人i指示传输周期iv的时间段i。
4.在一优选的实施方式中,方法包括:在接收到控制命令传输指示ii之后,测绘自走机器人i监听由测绘机器人控制器在传输周期iv的时间段i发送的自走机器人控制命令,其中,传输周期iv与传输周期i之间间隔两个传输周期;在成功接收自走机器人控制命令之后,由测绘自走机器人i在传输周期v的时间段i向测绘机器人控制器发送正确接收消息,其中,在时间上,传输周期v与传输周期i之间间隔两个传输周期,其中,控制命令传输指示ii包含的比特数小于自走机器人控制命令包含的比特数。
5.在一优选的实施方式中,方法包括:测绘自走机器人ii接收由测绘机器人控制器在传输周期i的时间段ii中发送的控制命令传输指示iii,其中,控制命令传输指示iii向测绘自走机器人ii指示传输周期i的时间段iii;在接收到控制命令传输指示iii之后,测绘自走机器人ii监听由测绘机器人控制器在传输周期i的时间段iii发送的自走机器人控制命令,其中,控制命令传输指示iii包含的比特数小于自走机器人控制命令包含的比特数;如果没有成功解码自走机器人控制命令,测绘自走机器人ii在传输周期vi的时间段i向测绘机器人控制器发送未正确接收消息ii,其中,在时间上,传输周期vi是传输周期i之后的第
一个传输周期;在接收到未正确接收消息ii之后,测绘机器人控制器在传输周期vii的时间段i中向测绘自走机器人i发送控制命令传输指示iv,其中,传输周期vii与传输周期i之间间隔三个传输周期,其中,控制命令传输指示iv向测绘自走机器人ii指示传输周期vii的时间段ii;在接收到控制命令传输指示iv之后,测绘自走机器人ii监听由测绘机器人控制器在传输周期iv的时间段ii发送的自走机器人控制命令,其中,控制命令传输指示iv的比特数小于自走机器人控制命令包含的比特数。
6.在一优选的实施方式中,方法包括:在接收到自走机器人控制命令之后,由测绘自走机器人i向测绘机器人控制器发送资源请求;在接收到资源请求之后,测绘机器人控制器向测绘自走机器人i分配用于向其它测绘自走机器人传输数据的特定资源;在接收到特定资源之后,测绘自走机器人i在特定资源的传输周期i以及频率i上向其它测绘自走机器人发送传输指示命令,其中,传输控制命令向其它测绘自走机器人指示传输周期ii;在接收到传输指示命令之后,其它测绘自走机器人监听由测绘自走机器人i发送的自走机器人控制命令,其中,自走机器人控制命令是在特定资源的传输周期ii以及频率ii上发送的,其中,频率ii与频率i具有预定义的对应关系。
7.在一优选的实施方式中,方法包括:在接收到自走机器人控制命令之后,测绘自走机器人ii向测绘机器人控制器发送资源请求;在接收到资源请求之后,测绘机器人控制器向测绘自走机器人ii分配用于向其它测绘自走机器人传输数据的特定资源;在接收到特定资源之后,测绘自走机器人ii在特定资源的传输周期i以及频率iii上向其它测绘自走机器人发送传输指示命令ii,其中,传输指示命令ii向其它测绘自走机器人指示传输周期iii;在接收到传输指示命令ii之后,由其它测绘自走机器人监听由测绘自走机器人ii发送的自走机器人控制命令,其中,自走机器人控制命令是在传输周期iii以及频率iv上发送的,其中,传输周期iii在传输周期ii之后,其中,频率iv与频率iii具有预定义的对应关系。
8.在一优选的实施方式中,方法包括:在接收到自走机器人控制命令之后,测绘自走机器人ii向测绘机器人控制器发送资源请求;在接收到资源请求之后,测绘机器人控制器向测绘自走机器人ii分配用于向其它测绘自走机器人传输数据的特定资源;在接收到特定资源之后,测绘自走机器人ii在特定资源的传输周期i以及频率iii上向其它测绘自走机器人发送传输指示命令ii,其中,传输指示命令ii向其它测绘自走机器人指示传输周期iii以及传输周期iv;在接收到传输指示命令ii之后,由其它测绘自走机器人监听由测绘自走机器人ii发送的自走机器人控制命令,其中,自走机器人控制命令是在传输周期iii和传输周期iv以及频率iv上发送的,其中,传输周期iii和传输周期iv在传输周期ii之后,其中,频率iv与频率iii具有预定义的对应关系,其中,频率iv的带宽小于频率ii的带宽。
9.本发明提供了一种远程控制地质测绘自走机器人的系统,系统包括多个测绘自走机器人以及测绘机器人控制器,多个测绘自走机器人以及测绘机器人控制器被配置为进行以下操作:测绘自走机器人i接收由测绘机器人控制器在传输周期i的时间段i中发送的控制命令传输指示i,其中,控制命令传输指示i向测绘自走机器人i指示传输周期i的时间段ii;在接收到控制命令传输指示i之后,测绘自走机器人i监听由测绘机器人控制器在传输周期i的时间段ii发送的自走机器人控制命令,其中,控制命令传输指示i包含的比特数小于自走机器人控制命令包含的比特数;如果没有成功接收自走机器人控制命令,测绘自走机器人i在传输周期ii的时间段i向测绘机器人控制器发送未正确接收消息i,其中,在时间
上,传输周期ii是传输周期i之后的第一个传输周期;在接收到未正确接收消息i之后,测绘机器人控制器在传输周期iii的时间段i中向测绘自走机器人i发送控制命令传输指示ii,其中,传输周期iii与传输周期i之间间隔传输周期ii,其中,控制命令传输指示ii向测绘自走机器人i指示传输周期iv的时间段i。
10.在一优选的实施方式中,系统包括多个测绘自走机器人以及测绘机器人控制器,多个测绘自走机器人以及测绘机器人控制器被配置为进行以下操作:在接收到控制命令传输指示ii之后,测绘自走机器人i监听由测绘机器人控制器在传输周期iv的时间段i发送的自走机器人控制命令,其中,传输周期iv与传输周期i之间间隔两个传输周期;在成功解码自走机器人控制命令之后,由测绘自走机器人i在传输周期v的时间段i向测绘机器人控制器发送正确接收消息,其中,在时间上,传输周期v与传输周期i之间间隔两个传输周期,其中,控制命令传输指示ii包含的比特数小于自走机器人控制命令包含的比特数。
11.在一优选的实施方式中,系统包括多个测绘自走机器人以及测绘机器人控制器,多个测绘自走机器人以及测绘机器人控制器被配置为进行以下操作:测绘自走机器人ii接收由测绘机器人控制器在传输周期i的时间段ii中发送的控制命令传输指示iii,其中,控制命令传输指示iii向测绘自走机器人ii指示传输周期i的时间段iii;在接收到控制命令传输指示iii之后,测绘自走机器人ii监听由测绘机器人控制器在传输周期i的时间段iii发送的自走机器人控制命令,其中,控制命令传输指示iii包含的比特数小于自走机器人控制命令包含的比特数;如果没有成功解码自走机器人控制命令,测绘自走机器人ii在传输周期vi的时间段i向测绘机器人控制器发送未正确接收消息ii,其中,在时间上,传输周期vi是传输周期i之后的第一个传输周期;在接收到未正确接收消息ii之后,测绘机器人控制器在传输周期vii的时间段i中向测绘自走机器人i发送控制命令传输指示iv,其中,传输周期vii与传输周期i之间间隔三个传输周期,其中,控制命令传输指示iv向测绘自走机器人ii指示传输周期vii的时间段ii;在接收到控制命令传输指示iv之后,测绘自走机器人ii监听由测绘机器人控制器在传输周期iv的时间段ii发送的自走机器人控制命令,其中,控制命令传输指示iv的比特数小于自走机器人控制命令包含的比特数。
12.在一优选的实施方式中,系统包括多个测绘自走机器人以及测绘机器人控制器,多个测绘自走机器人以及测绘机器人控制器被配置为进行以下操作:在接收到自走机器人控制命令之后,由测绘自走机器人i向测绘机器人控制器发送资源请求;在接收到资源请求之后,测绘机器人控制器向测绘自走机器人i分配用于向其它测绘自走机器人传输数据的特定资源;在接收到特定资源之后,测绘自走机器人i在特定资源的传输周期i以及频率i上向其它测绘自走机器人发送传输指示命令,其中,传输控制命令向其它测绘自走机器人指示传输周期ii;在接收到传输指示命令之后,其它测绘自走机器人监听由测绘自走机器人i发送的自走机器人控制命令,其中,自走机器人控制命令是在特定资源的传输周期ii以及频率ii上发送的,其中,频率ii与频率i具有预定义的对应关系;在一优选的实施方式中,在接收到自走机器人控制命令之后,测绘自走机器人ii向测绘机器人控制器发送资源请求;在接收到资源请求之后,测绘机器人控制器向测绘自走机器人ii分配用于向其它测绘自走机器人传输数据的特定资源;在接收到特定资源之后,测绘自走机器人ii在特定资源的传输周期i以及频率iii上向其它测绘自走机器人发送传输指示命令ii,其中,传输指示命令
ii向其它测绘自走机器人指示传输周期iii;在接收到传输指示命令ii之后,由其它测绘自走机器人监听由测绘自走机器人ii发送的自走机器人控制命令,其中,自走机器人控制命令是在传输周期iii以及频率iv上发送的,其中,传输周期iii在传输周期ii之后,其中,频率iv与频率iii具有预定义的对应关系;在一优选的实施方式中,在接收到自走机器人控制命令之后,测绘自走机器人ii向测绘机器人控制器发送资源请求;在接收到资源请求之后,测绘机器人控制器向测绘自走机器人ii分配用于向其它测绘自走机器人传输数据的特定资源;在接收到特定资源之后,测绘自走机器人ii在特定资源的传输周期i以及频率iii上向其它测绘自走机器人发送传输指示命令ii,其中,传输指示命令ii向其它测绘自走机器人指示传输周期iii以及传输周期iv;在接收到传输指示命令ii之后,由其它测绘自走机器人监听由测绘自走机器人ii发送的自走机器人控制命令,其中,自走机器人控制命令是在传输周期iii和传输周期iv以及频率iv上发送的,其中,传输周期iii和传输周期iv在传输周期ii之后,其中,频率iv与频率iii具有预定义的对应关系,其中,频率iv的带宽小于频率ii的带宽。
13.与现有技术相比,本发明具有如下优点,针对测绘机器人控制而言,目前最简单也最原始的测绘自走机器人的控制方式类似于遥控汽车的控制方式,测绘机器人控制器类似于原始的遥控器,测绘自走机器人的操作方式则类似于遥控汽车。这种控制方式虽然可以直接通过照搬和转用现有技术实现并且简单易行,但是这种方式传输的信息量有限,也即无法控制测绘自走机器人进行复杂动作,同时这种方式无法控制不同自走机器人做出不同的动作。针对该问题,需要使用局域网技术来实现复杂控制命令的传输以及多台自走机器人的同时控制,那么针对在局域网中进行多台自走机器人控制的场景,本发明提出了相关的方法,本发明的方法能够提升局域网的传输效率。
附图说明
14.图1是根据本发明的一个实施方式的方法流程图;图2是根据本发明的一个实施方式的方法流程图;图3是根据本发明的一个实施方式的方法流程图。
具体实施方式
15.下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
16.除非另有其它明确表示,否则在整个说明书和权利要求书中,术语“包括”或其变换如“包含”或“包括有”等等将被理解为包括所陈述的元件或组成部分,而并未排除其它元件或其它组成部分。
17.在本发明的应用场景中,科研人员不需要进行实地测绘,科研人员通过操作测绘机器人控制器的方式来控制测绘自走机器人进行地质测绘。目前最简单也最原始的测绘自走机器人的控制方式类似于遥控汽车的控制方式,测绘机器人控制器类似于原始的遥控器,测绘自走机器人的操作方式则类似于遥控汽车。这种控制方式虽然可以直接通过照搬和转用现有技术实现并且简单易行,但是这种方式传输的信息量有限,也即无法控制测绘自走机器人进行复杂动作,同时这种方式无法控制不同自走机器人做出不同的动作。针对
该问题,需要使用局域网技术来实现复杂控制命令的传输以及多台自走机器人的同时控制,那么针对在局域网中进行多台自走机器人控制的场景,本发明提出了相关的方法,本发明的方法能够提升局域网的传输效率。
18.图1是根据本发明的一个实施方式的方法流程图。如图所示,一个实施例的方法包括:s11:测绘自走机器人i接收由测绘机器人控制器在传输周期i的时间段i中发送的控制命令传输指示i,其中,控制命令传输指示i向测绘自走机器人i指示传输周期i的时间段ii;在本发明的应用场景中,由于局域网带宽较大,所以不希望测绘自走机器人随时监听整个带宽上由测绘机器人控制器发送的数据,否则容易出现耗电的问题,在一个方面中,规定测绘自走机器人i仅在传输周期i的时间段i中监听控制命令传输指示i,如果监听到该指示,则测绘自走机器人i继续监听后续数据,如果没有监听到该指示,则测绘自走机器人i不监听后续数据;s12:在接收到控制命令传输指示i之后,测绘自走机器人i监听由测绘机器人控制器在传输周期i的时间段ii发送的自走机器人控制命令,其中,控制命令传输指示i包含的比特数小于自走机器人控制命令包含的比特数;在一个方面中,控制命令传输指示i包含的比特数较少,所以用于发送控制命令传输指示的频带可以更窄,在一个方面中,用于发送控制命令传输指示的频带可以比用于发送自走机器人控制命令的频带更窄;测绘自走机器人监听时间更短,并且监听的带宽更小,则可以实现降低耗电的目的;在一个方面中,由于当前局域网的带宽足够大,所以自走机器人控制命令包含的数据量可以更大,这使得自走机器人控制命令可以更为复杂,实现自走机器人的复杂操作;在一个方面中,在命令传输时延满足要求的情况下,一个传输周期可以是10ms,20ms,100ms,甚至1000ms,时间段是比传输周期更小的单位;s13:如果没有成功接收自走机器人控制命令,测绘自走机器人i在传输周期ii的时间段i向测绘机器人控制器发送未正确接收消息i,其中,在时间上,传输周期ii是传输周期i之后的第一个传输周期;s14:在接收到未正确接收消息i之后,测绘机器人控制器在传输周期iii的时间段i中向测绘自走机器人i发送控制命令传输指示ii,其中,传输周期iii与传输周期i之间间隔传输周期ii,其中,控制命令传输指示ii向测绘自走机器人i指示传输周期iv的时间段i。
19.图2是根据本发明的一个实施方式的方法流程图。如图所示,在一个方面中,方法包括:s21:在接收到控制命令传输指示ii之后,测绘自走机器人i监听由测绘机器人控制器在传输周期iv的时间段i发送的自走机器人控制命令,其中,传输周期iv与传输周期i之间间隔两个传输周期;s22:在成功接收自走机器人控制命令之后,由测绘自走机器人i在传输周期v的时间段i向测绘机器人控制器发送正确接收消息,其中,在时间上,传输周期v与传输周期i之间间隔两个传输周期,其中,控制命令传输指示ii包含的比特数小于自走机器人控制命令包含的比特数。在一个方面中,传输周期iv与传输周期v时间上重叠,但是频率上两者频分复用,换言之,传输周期iv可以是在频率f1上的传输周期,传输周期v可以是在频率f2上的传输周期,本领域技术人员应该理解,传输周期v的时间段i在时间上发生在传输周期iv的
时间段i之后;在一优选的实施方式中,方法包括:测绘自走机器人ii接收由测绘机器人控制器在传输周期i的时间段ii中发送的控制命令传输指示iii,其中,控制命令传输指示iii向测绘自走机器人ii指示传输周期i的时间段iii;在接收到控制命令传输指示iii之后,测绘自走机器人ii监听由测绘机器人控制器在传输周期i的时间段iii发送的自走机器人控制命令,其中,控制命令传输指示iii包含的比特数小于自走机器人控制命令包含的比特数;如果没有成功解码自走机器人控制命令,测绘自走机器人ii在传输周期vi的时间段i向测绘机器人控制器发送未正确接收消息ii,其中,在时间上,传输周期vi是传输周期i之后的第一个传输周期;在接收到未正确接收消息ii之后,测绘机器人控制器在传输周期vii的时间段i中向测绘自走机器人i发送控制命令传输指示iv,其中,传输周期vii与传输周期i之间间隔三个传输周期,其中,控制命令传输指示iv向测绘自走机器人ii指示传输周期vii的时间段ii;在一个方面中,重新发送的自走机器人控制命令与首次发送的自走机器人控制命令之间的间隔时间随意可调整,这保证了资源分配的灵活性;例如在传输周期vii与传输周期i之间间隔的三个传输周期中如果出现其它高优先级的传输请求,则此三个传输周期可以优先被用于其它高优先级传输;在接收到控制命令传输指示iv之后,测绘自走机器人ii监听由测绘机器人控制器在传输周期iv的时间段ii发送的自走机器人控制命令,其中,控制命令传输指示iv的比特数小于自走机器人控制命令包含的比特数。
20.在本发明的一个方面中,为了扩展测绘机器人控制器的控制范围,可以通过多跳的方式来控制测绘自走机器人,在一个方面中,测绘机器人控制器将一套用于多个测绘机器人的命令发送给群组中的一个测绘自走机器人,测绘机器人随后将用于其它测绘自走机器人的命令转发给其它测绘自走机器人,由此实现了测绘机器人控制器的控制范围,并且更大的提高了控制器的控制数量。图3是根据本发明的一个实施方式的方法流程图。如图所示,在一个方面中,方法包括:s31:在接收到自走机器人控制命令之后,由测绘自走机器人i向测绘机器人控制器发送资源请求;s32:在接收到资源请求之后,测绘机器人控制器向测绘自走机器人i分配用于向其它测绘自走机器人传输数据的特定资源;s33:在接收到特定资源之后,测绘自走机器人i在特定资源的传输周期i以及频率i上向其它测绘自走机器人发送传输指示命令,其中,传输控制命令向其它测绘自走机器人指示传输周期ii;s34:在接收到传输指示命令之后,其它测绘自走机器人监听由测绘自走机器人i发送的自走机器人控制命令,其中,自走机器人控制命令是在特定资源的传输周期ii以及频率ii上发送的,其中,频率ii与频率i具有预定义的对应关系。在一个方面中,频率ii与频率i的预定义的对应关系可以是在整个系统部署之前,由科研人员通过usb、pcie等接口写入测绘自走机器人的。
21.在一优选的实施方式中,方法包括:在接收到自走机器人控制命令之后,测绘自走机器人ii向测绘机器人控制器发送资源请求;在接收到资源请求之后,测绘机器人控制器向测绘自走机器人ii分配用于向其它测绘自走机器人传输数据的特定资源;在接收到特定资源之后,测绘自走机器人ii在特定资源的传输周期i以及频率iii上向其它测绘自走机器人发送传输指示命令ii,其中,传输指示命令ii向其它测绘自走机器人指示传输周期iii;
在一个方面中,测绘自走机器人ii发送对象的其它测绘自走机器人可以不同于测绘自走机器人i发送对象的其它测绘自走机器人,在一个方面中,测绘自走机器人ii发送对象的其它测绘自走机器人可以与测绘自走机器人i发送对象的其它测绘自走机器人相同,在该方面中,一个其它测绘自走机器人在接收到测绘自走机器人i和测绘自走机器人ii发送的自走机器人控制命令之后,可以判断测绘自走机器人i发送的自走机器人控制命令与测绘自走机器人ii发送的自走机器人控制命令是否冲突,例如测绘自走机器人i发送的自走机器人控制命令控制自走机器人向左行进,测绘自走机器人ii发送的自走机器人控制命令控制自走机器人向右行进,则判断出现控制命令的冲突,例如测绘自走机器人i发送的自走机器人控制命令控制自走机器人向测绘自走机器人i发送测绘数据,测绘自走机器人ii发送的自走机器人控制命令控制自走机器人向右行进,则两个命令不冲突;在一个方面中,如果出现命令的冲突,则其它测绘自走机器人可以基于测绘自走机器人i和ii的优先级来决定执行哪一者的命令,也可以基于先接收到哪一者的命令来决定执行哪一者的命令。
22.在接收到传输指示命令ii之后,由其它测绘自走机器人监听由测绘自走机器人ii发送的自走机器人控制命令,其中,自走机器人控制命令是在传输周期iii以及频率iv上发送的,其中,传输周期iii在传输周期ii之后,其中,频率iv与频率iii具有预定义的对应关系。
23.在一优选的实施方式中,方法包括:在接收到自走机器人控制命令之后,测绘自走机器人ii向测绘机器人控制器发送资源请求;在接收到资源请求之后,测绘机器人控制器向测绘自走机器人ii分配用于向其它测绘自走机器人传输数据的特定资源;在接收到特定资源之后,测绘自走机器人ii在特定资源的传输周期i以及频率iii上向其它测绘自走机器人发送传输指示命令ii,其中,传输指示命令ii向其它测绘自走机器人指示传输周期iii以及传输周期iv;在接收到传输指示命令ii之后,由其它测绘自走机器人监听由测绘自走机器人ii发送的自走机器人控制命令,其中,自走机器人控制命令是在传输周期iii和传输周期iv以及频率iv上发送的,其中,传输周期iii和传输周期iv在传输周期ii之后,其中,频率iv与频率iii具有预定义的对应关系,其中,频率iv的带宽小于频率ii的带宽。
24.应当理解的是,在本发明的各种实施例中,上述各过程的撰写的先后顺序并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本发明实施例的实施过程构成任何限定。
25.应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1