一种自动门自重测量优化方法与流程
1.本发明涉及自动门技术领域,尤其涉及一种自动门自重测量优化方法。
背景技术:
2.自动门是可以将人接近门的动作(或将某种入门授权)识别为开门信号的控制单元,通过驱动系统将门开启,在人离开后再将门自动关闭,并对开启和关闭的过程实现控制的系统。
3.同重量的物体具有不同的惯性。物体的惯性决定了物体改变运行状态的难易程度。因此不同重量的自动门在运行过程中,需要根据所负载的门的不同重量,选择合适的驱动算法(包括驱动功率,刹车功率,刹车时机等等)。
4.有资料显示,目前对自动门的重量参数,采取人工预估设置的办法进行设定:自动门上的门重设置编码开关;或者通过软件(app或者专用设置工具)的门重设置选项设置,然后与自动门之间通讯来实现手工设置门的重量。
5.中国专利文献cn109838169a公开了一种“自动门装置”。采用了活动门体、掩体、导轨块和控制器,所述活动门体、掩体、导轨块均成对设置,掩体固定在两块导轨块之间,活动门体设置在掩体中;所述掩体表面设置有红外传感器,所述红外传感器在掩体两侧均有设置;活动门体表面固定设置有采集块,采集块上设置有指纹采集器;所述采集块在活动门体两侧均有设置;所述掩体上开有门体回收槽,导轨块上设置有导轨槽,导轨槽与门体回收槽宽度相同,活动门体两端设置在导轨槽中,中间部位设置在门体回收槽中;所述红外传感器、指纹采集器均与控制器连接。上述技术方案未考虑自动门之间存在的自重区别,使得自动门运行参数设置不精确,难以有效做到驱动适配。
技术实现要素:
6.本发明主要解决原有的技术方案面对自动门之间存在自重区别导致自动门运行参数设置不精确的技术问题,提供一种自动门自重测量优化方法,首先在自动门上集成优化程序,对自动门活动部件优化处理避免外部因素影响,运行优化程序进行原始测量并将测量速度保存为判断基准,以此基准将自动门自重范围划分为轻门和重门,然后在用户条件下运行优化程序进行实际测量,获取测量速度进行判断以实现根据门的重量选择合适的驱动,有效做到驱动适配。
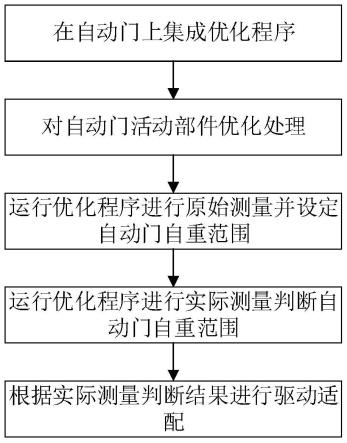
7.本发明的上述技术问题主要是通过下述技术方案得以解决的:本发明包括以下步骤:
8.s1在自动门上集成优化程序;
9.s2对自动门活动部件优化处理;
10.s3运行优化程序进行原始测量并设定自动门自重范围;
11.s4运行优化程序进行实际测量判断自动门自重范围;
12.s5根据实际测量判断结果进行驱动适配。
13.作为优选,所述的步骤s2对自动门活动部件优化处理包括对运动部件以及自动门运动轨迹进行充分润滑。避免摩擦力与自动门运动轨迹中存在的杂物阻碍自动门运行导致原始测量得到的基准速度v0偏小。
14.作为优选,所述的步骤s3具体包括:
15.s3.1将电机按照固定功率输出固定时间进行工作;
16.s3.2测量电机输出完毕自动门的基准速度v0;
17.s3.3将运动速度v0作为判断基准划分自动门自重范围。
18.作为优选,所述的步骤s3.1电机工作具体包括按照25%的功率进行输出并持续运行2s。原始测试与实际测试保持电机输出相同固定功率,测量持续运行2s后的速度。
19.作为优选,所述的步骤s3.2测量电机输出完毕自动门的基准速度v0具体为:
20.v0=a0t
21.f=a0m
[0022][0023]
其中,f为电机按照固定功率输出产生的力,a0为电机固定力作用下自动门的加速度,m为自动门自重。根据f=a0m,物体所受的力一定时,其加速度和质量成反比,质量越大,加速度越小,则经过固定时间加速后所能达到的速度也越低。反之,质量越小,加速度越大,经过固定时间加速后能达到的速度也越高。
[0024]
作为优选,所述的步骤s3.3划分自动门自重范围具体包括,若达到基准速度v0所需要的时间小于2s,即按照设定输出2s后大于原始测量所得的基准速度v0,则判定为轻门;若按照设定输出2s后测量所得速度小于基准速度v0,则判定为重门。
[0025]
作为优选,所述的步骤s4具体包括,保持实际测量电机与原始测量输出固定功率和输出时间相同获取测量结果,将测量速度与基准速度v0以判断当前实际自动门为轻门还是重门,保存门重参数。在启动时,根据门重判断结果,轻门直接启动,重门软启动。在运行时,根据门重判断结果,轻门按照轻门pid参数运行,重门按照重门pid参数运行。在停止时,根据门重判断结果,轻门减速停止,重门反推停止。
[0026]
本发明的有益效果是:首先在自动门上集成优化程序,对自动门活动部件优化处理避免外部因素影响,运行优化程序进行原始测量并将测量速度保存为判断基准,以此基准将自动门自重范围划分为轻门和重门,然后在用户条件下运行优化程序进行实际测量,获取测量速度进行判断以实现根据门的重量选择合适的驱动,有效做到驱动适配。
附图说明
[0027]
图1是本发明的一种流程图。
[0028]
图2是本发明的一种运行优化程序进行实际测量流程图。
[0029]
图3是本发明的一种自动门启动时工作流程图。
[0030]
图4是本发明的一种自动门运行时工作流程图。
[0031]
图5是本发明的一种自动门停止时工作流程图。
具体实施方式
[0032]
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
[0033]
实施例:本实施例的一种自动门自重测量优化方法,如图1所示,包括以下步骤:
[0034]
s1在自动门上集成优化程序。
[0035]
s2对自动门活动部件优化处理,包括对运动部件以及自动门运动轨迹进行充分润滑。避免摩擦力与自动门运动轨迹中存在的杂物阻碍自动门运行导致原始测量得到的基准速度v0偏小。
[0036]
s3运行优化程序进行原始测量并设定自动门自重范围,如图2所示,具体包括:
[0037]
s3.1将电机按照固定功率输出固定时间进行工作,电机工作具体包括按照25%的功率进行输出并持续运行2s。原始测试与实际测试保持电机输出相同固定功率,测量持续运行2s后的速度。
[0038]
s3.2测量电机输出完毕自动门的基准速度v0,基准速度v0具体为:
[0039]
v0=a0t
[0040]
f=a0m
[0041][0042]
其中,f为电机按照固定功率输出产生的力,a0为电机固定力作用下自动门的加速度,m为自动门自重。根据f=a0m,物体所受的力一定时,其加速度和质量成反比,质量越大,加速度越小,则经过固定时间加速后所能达到的速度也越低。反之,质量越小,加速度越大,经过固定时间加速后能达到的速度也越高。
[0043]
s3.3将运动速度v0作为判断基准划分自动门自重范围,自重范围具体包括,按照与原始测量相同固定功率输出固定时间进行实际测量后,若达到基准速度v0所需要的时间小于2s,即按照设定输出2s后大于原始测量所得的基准速度v0,则判定为轻门;若按照设定输出2s后测量所得速度小于基准速度v0,则判定为重门。
[0044]
s4运行优化程序进行实际测量判断自动门自重范围,具体包括,保持实际测量电机与原始测量输出固定功率和输出时间相同获取测量结果,将测量速度与基准速度v0以判断当前实际自动门为轻门还是重门,保存门重参数。
[0045]
s5根据实际测量判断结果进行驱动适配。如图3所示,在启动时,根据门重判断结果,轻门直接启动,重门软启动。如图4所示,在运行时,根据门重判断结果,轻门按照轻门pid参数运行,重门按照重门pid参数运行。如图5所示,在停止时,根据门重判断结果,轻门减速停止,重门反推停止。
[0046]
判断门重时,电机固定输出25%的功率产生一个固定的f。此时,电机的输出f为门受到的拉力(f拉)和其他阻力(f阻)之和,为减小阻力对系统基准的影响。在实验室条件下,对运动部件进行充分润滑,以40kg重量为标准,给定电机25%的输出功率,测量2秒后,门所达到的速度。以此速度作为判断基准,在自动门实际安装后,重复运行上面的重量判断程序:给定电机25%的输出功率,测量2秒后门所到达的速度。如果大于实验室的基准速度,则判定为轻门;如果测量所得速度小于基准,则判定为重门;并保存此数据。为防止门重过轻,使得自学习时,门的速度过大。作为优选,以达到基准速度的时间低于2s作为判定轻门的条件。这样即可无需通过其他不可靠的预估手段人工设置门重,从而选择合适的驱动算法。
[0047]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
[0048]
尽管本文较多地使用了优化程序、自重范围等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1