一种安全巡逻机器人的制作方法
1.本发明涉及巡逻机器人技术领域,具体为一种安全巡逻机器人。
背景技术:
2.随着科技的不断发展,大多数领域的工作都采用人工智能机器人取代,在公共安全领域,需要不断的巡逻,进而来及时发现险情,从而对险情及时判断,同时对受害人员及时救助,现如今巡逻工作越来越趋向于采用机器人来完成。
3.现有的安全巡逻机器人主要存在如下技术缺陷:其一、传统安全巡逻机器人通过装备有摄像头来识别用户身份,而在寒冷冬季时,摄像头的镜片存在结冰雾化的情形,进而导致机器人无法清晰的识别用户身份,从而造成后续救助物品无法及时送达的问题;其二、传统巡逻机器人在运送救助物品时,由于路面存在崎岖不平的地方,进而导致机器人受路面崎岖不平的影响从而产生颠簸,由于颠簸进而造成物品来回晃动,使得救助物品容易损环。
技术实现要素:
4.本发明的目的在于提供一种安全巡逻机器人,以解决背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种安全巡逻机器人,包括货物箱,所述货物箱的前后两侧均固定安装有行走组件,所述货物箱的右侧固定安装有支撑杆,所述支撑杆的上侧固定连接有摄像头,首先安全巡逻机器人通过行走组件进行正常行走完成巡逻工作,通过电脑系统控制摄像头进行来回转动,将摄像头摄入到的图像传输至电脑系统,进而电脑系统判断是否有险情、是否有呼救人员,若发现险情和呼救人员,摄像头对呼救人员的用户身份进行识别,识别成功后巡逻机器人将手电筒、食物等救助物品运输到指定的救助地点,所述摄像头的左侧固定安装有产风装置,所述产风装置的下侧设置有引导装置,所述货物箱的内部固定连接有分隔板,所述货物箱的内部固定安装有稳固装置;
6.所述产风装置包括风筒、风滤板、电机、扇叶杆、加热丝、吹风组件和保温组件,所述摄像头左侧固定连接有风筒,所述风筒的轴向内侧通过矩形块固定连接有电机,所述电机的左侧转动连接有扇叶杆,所述风筒的左侧固定连接有风滤板,由于外部空气需经过风滤板进入到风筒的内部,且风滤板上开设有分布均匀的通孔,使得可以将外部的杂质进行有效过滤,从而解决了因杂质进入造成内部元件损坏的问题;
7.所述风滤板上开设有均匀分布的通孔,所述风筒的轴向内侧且在电机的右侧固定连接有加热丝,所述风筒的上侧固定安装有吹风组件,所述吹风组件的内部设置有保温组件。
8.进一步,所述吹风组件的结构包括第一通风管、维持管和喷气管,所述风筒的上侧固定连接有第一通风管,所述第一通风管的右侧固定连接有维持管,在冬季寒冷天气来临时,摄像头上的镜片存在结冰雾化的情形,此时电脑系统判断出这一情形,启动电机带动扇叶杆进行转动,同时对加热丝内部通入电流,使得加热丝对周围的空气进行加热,扇叶杆在
转动的同时将外部的空气通过风滤板抽运到风筒的内部,随后气体经过加热丝被加热运输到第一通风管的内部,然后第一通风管的内部的加热气体经过维持管和喷气管向外对摄像头上的镜片喷出,进而实现了对镜片上冰块和雾气进行加热的目的,从而达到去除冰块和雾气的效果,所述维持管的右部下侧固定连接有喷气管。
9.进一步,所述保温组件的结构包括凸块和锥形管,所述维持管的内部固定连接有锥形管,在加热气体通过维持管向喷气管处运输时,由于维持管的内部设置有等距分布的锥形管,且锥形管的管径有左侧向右侧有逐渐增大的趋势,气体从小孔进、大孔出,出孔气体受到膨胀,使得流速减小,使得气体的热量得以稳定维持,由于锥形管的轴向内侧壁上开设有等距分布的凸块,使得气体得以有轨迹的运动,从而提高气体的冲击力,所述锥形管在维持管的内部等距分布,所述锥形管的轴向内侧壁上开设有等距分布的凸块。
10.进一步,所述引导装置包括第二通风管、主流管和分支管,所述风筒的下侧固定连接有第二通风管,所述第二通风管的右侧固定连接有主流管,在风筒内的气体向第一通风管内运输的同时,风筒的部分气体进入到第二通风管内,然后通过主流管向外排出,由于主流管的上侧开设有分支管,且分支管所处的位置与喷气管相对应,同时分支管的管径小于主流管的管径,使得主流管在向外排出气体的将分支管上处的气体引入到主流管内并且向外排出,进而实现了摄像头镜片处的加热气体得以快速循环流动的目的,从而达到快速去除冰块和雾气的效果,所述主流管的上侧开设有分支管,所述分支管的位置与喷气管相对应。
11.进一步,所述稳固装置包括固定块、夹紧板、检测装置和动力组件,所述货物箱的内部底侧壁上固定连接有固定块,所述固定块上转动连接有夹紧板,所述夹紧板的下侧设置有检测装置,在巡逻机器人在装备救助物品时,由于货物箱的内部设置有分隔板,使得可以将救助物品分类收纳,从而达到了在取用时方便便捷的效果,同时救助物品放入到由分隔板分隔成的区间内,通过夹紧板对物品进行夹紧,由于夹紧板上开设有分布均匀的齿槽,使得对物品的夹紧度更佳,从而达到减少物品因崎岖路面影响所晃动的程度,所述夹紧板的左侧设置有动力组件。
12.进一步,所述检测装置的结构包括第一电容板和第二电容板,所述货物箱内部的底侧壁上固定连接有第二电容板,所述夹紧板的下侧固定连接有第一电容板。
13.进一步,所述动力组件的结构包括磁块和线圈,所述夹紧板的左侧固定连接有磁块,所述磁块的左侧设置有线圈,所述线圈通电后产生与磁块相斥的磁场力,在巡逻机器人运输救助物品遇到崎岖路面时,使得货物箱受颠簸影响进而产生晃动,同时货物箱内的物品进行相同频率的晃动,在晃动的同时带动夹紧板进行同步运动,使得夹紧板带动与其固定连接的第一电容板在第二电容板上滑动,由于第一电容板与第二电容板发生位移,使得电势差发生改变,同时晃动的频率与电势差的变化值呈正比关系,进而通过电势差的变化值间接得到晃动的频率,然后电脑系统通过晃动的频率控制通入线圈内部的电流,使得线圈产生与磁块相斥的磁力大小与晃动的频率呈正向关系,进而实现了夹紧板对物品的夹紧程度与晃动的频率呈正向关系的目的,从而达到了可以根据路面的崎岖程度来合理适配对物品的夹紧程度的效果。
14.进一步,所述锥形管的管径由左端向右端有逐渐变大的趋势,所述喷气管与摄像头为倾斜设置。
15.进一步,所述夹紧板上开设有等距分布的齿槽,所述第一电容板在第二电容板上滑动。
16.与现有技术相比,本发明提供了一种安全巡逻机器人,具备以下有益效果:
17.1、该安全巡逻机器人,通过电机、扇叶杆、加热丝、第一通风管、维持管和喷气管之间的配合作用,进而实现了对镜片上冰块和雾气进行加热的目的,从而达到去除冰块和雾气的效果,进而解决了在寒冷冬季时,摄像头的镜片存在结冰雾化的情形,进而导致机器人无法清晰的识别用户身份,从而造成后续救助物品无法及时送达的问题。
18.2、该安全巡逻机器人,通过锥形管和凸块之间的配合作用,进而实现了气体的热量得以稳定维持,同时高气体的冲击力的目的,从而达到更佳有效的消除冰块和雾气的效果。
19.3、该安全巡逻机器人,通过第二通风管、主流管和分支管之间的配合作用,进而实现了摄像头镜片处的加热气体得以快速循环流动的目的,从而达到快速去除冰块和雾气的效果。
20.4、该安全巡逻机器人,通过货物箱的内部设置有分隔板,使得可以将救助物品分类收纳,从而达到了在取用时方便便捷的效果,同时救助物品放入到由分隔板分隔成的区间内,通过夹紧板对物品进行夹紧,由于夹紧板上开设有分布均匀的齿槽,使得对物品的夹紧度更佳,从而达到减少物品因崎岖路面影响所晃动的程度。
21.5、该安全巡逻机器人,通过夹紧板、第一电容板、第二电容板、线圈和磁块之间的配合作用,进而实现了夹紧板对物品的夹紧程度与晃动的频率呈正向关系的目的,从而达到了可以根据路面的崎岖程度来合理适配对物品的夹紧程度的效果,进而解决了传统巡逻机器人在运送救助物品时,由于路面存在崎岖不平的地方,进而导致机器人受路面崎岖不平的影响从而产生颠簸,由于颠簸进而造成物品来回晃动,使得救助物品容易损环的问题。
附图说明
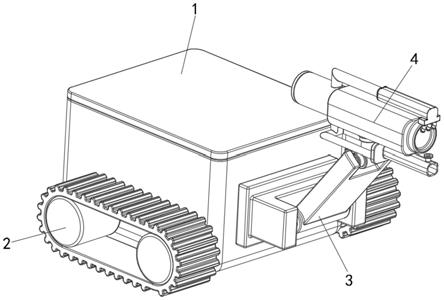
22.图1为本发明立体结构示意图;
23.图2为本发明摄像头的立体结构示意图;
24.图3为本发明吹风组件和引导装置的立体结构示意图;
25.图4为本发明保温组件的立体结构示意图;
26.图5为本发明货物箱的内部立体结构示意图;
27.图6为本发明分隔板的立体结构示意图;
28.图7为本发明稳固装置的立体结构示意图;
29.图8为本发明检测装置和动力组件的立体结构示意图;
30.图9为本发明图3中a处的放大结构示意图。
31.图中:1、货物箱;2、行走组件;3、支撑杆;4、摄像头;5、产风装置;51、风筒;52、风滤板;53、电机;54、扇叶杆;55、加热丝;56、吹风组件;561、第一通风管;562、维持管;563、喷气管;57、保温组件;571、凸块;572、锥形管;6、引导装置;61、第二通风管;62、主流管;63、分支管;7、分隔板;8、稳固装置;81、固定块;82、夹紧板;83、检测装置;831、第一电容板;832、第二电容板;84、动力组件;841、磁块;842、线圈。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.实施例
34.请参阅图1-图9,一种安全巡逻机器人,包括货物箱1,货物箱1的前后两侧均固定安装有行走组件2,货物箱1的右侧固定安装有支撑杆3,支撑杆3的上侧固定连接有摄像头4,首先安全巡逻机器人通过行走组件2进行正常行走完成巡逻工作,通过电脑系统控制摄像头4进行来回转动,将摄像头4摄入到的图像传输至电脑系统,进而电脑系统判断是否有险情、是否有呼救人员,若发现险情和呼救人员,摄像头4对呼救人员的用户身份进行识别,识别成功后巡逻机器人将手电筒、食物等救助物品运输到指定的救助地点,摄像头4的左侧固定安装有产风装置5,产风装置5的下侧设置有引导装置6,货物箱1的内部固定连接有分隔板7,货物箱1的内部固定安装有稳固装置8;
35.产风装置5包括风筒51、风滤板52、电机53、扇叶杆54、加热丝55、吹风组件56和保温组件57,摄像头4左侧固定连接有风筒51,风筒51的轴向内侧通过矩形块固定连接有电机53,电机53的左侧转动连接有扇叶杆54,风筒51的左侧固定连接有风滤板52,由于外部空气需经过风滤板52进入到风筒51的内部,且风滤板52上开设有分布均匀的通孔,使得可以将外部的杂质进行有效过滤,从而解决了因杂质进入造成内部元件损坏的问题;
36.风滤板52上开设有均匀分布的通孔,风筒51的轴向内侧且在电机53的右侧固定连接有加热丝55,风筒51的上侧固定安装有吹风组件56,吹风组件56的内部设置有保温组件57。
37.进一步,吹风组件56的结构包括第一通风管561、维持管562和喷气管563,风筒51的上侧固定连接有第一通风管561,第一通风管561的右侧固定连接有维持管562,在冬季寒冷天气来临时,摄像头4上的镜片存在结冰雾化的情形,此时电脑系统判断出这一情形,启动电机53带动扇叶杆54进行转动,同时对加热丝55内部通入电流,使得加热丝55对周围的空气进行加热,扇叶杆54在转动的同时将外部的空气通过风滤板52抽运到风筒51的内部,随后气体经过加热丝55被加热运输到第一通风管561的内部,然后第一通风管561的内部的加热气体经过维持管562和喷气管563向外对摄像头4上的镜片喷出,进而实现了对镜片上冰块和雾气进行加热的目的,从而达到去除冰块和雾气的效果,维持管562的右部下侧固定连接有喷气管563。
38.进一步,保温组件57的结构包括凸块571和锥形管572,维持管562的内部固定连接有锥形管572,在加热气体通过维持管562向喷气管563处运输时,由于维持管562的内部设置有等距分布的锥形管572,且锥形管572的管径有左侧向右侧有逐渐增大的趋势,气体从小孔进、大孔出,出孔气体受到膨胀,使得流速减小,使得气体的热量得以稳定维持,由于锥形管572的轴向内侧壁上开设有等距分布的凸块571,使得气体得以有轨迹的运动,从而提高气体的冲击力,锥形管572在维持管562的内部等距分布,锥形管572的轴向内侧壁上开设有等距分布的凸块571。
39.进一步,引导装置6包括第二通风管61、主流管62和分支管63,风筒51的下侧固定
连接有第二通风管61,第二通风管61的右侧固定连接有主流管62,在风筒51内的气体向第一通风管561内运输的同时,风筒51的部分气体进入到第二通风管61内,然后通过主流管62向外排出,由于主流管62的上侧开设有分支管63,且分支管63所处的位置与喷气管563相对应,同时分支管63的管径小于主流管62的管径,使得主流管62在向外排出气体的将分支管63上处的气体引入到主流管62内并且向外排出,进而实现了摄像头4镜片处的加热气体得以快速循环流动的目的,从而达到快速去除冰块和雾气的效果,主流管62的上侧开设有分支管63,分支管63的位置与喷气管563相对应。
40.进一步,稳固装置8包括固定块81、夹紧板82、检测装置83和动力组件84,货物箱1的内部底侧壁上固定连接有固定块81,固定块81上转动连接有夹紧板82,夹紧板82的下侧设置有检测装置83,在巡逻机器人在装备救助物品时,由于货物箱1的内部设置有分隔板7,使得可以将救助物品分类收纳,从而达到了在取用时方便便捷的效果,同时救助物品放入到由分隔板7分隔成的区间内,通过夹紧板82对物品进行夹紧,由于夹紧板82上开设有分布均匀的齿槽,使得对物品的夹紧度更佳,从而达到减少物品因崎岖路面影响所晃动的程度,夹紧板82的左侧设置有动力组件84。
41.进一步,检测装置83的结构包括第一电容板831和第二电容板832,货物箱1内部的底侧壁上固定连接有第二电容板832,夹紧板82的下侧固定连接有第一电容板831。
42.进一步,动力组件84的结构包括磁块841和线圈842,夹紧板82的左侧固定连接有磁块841,磁块841的左侧设置有线圈842,线圈842通电后产生与磁块841相斥的磁场力,在巡逻机器人运输救助物品遇到崎岖路面时,使得货物箱1受颠簸影响进而产生晃动,同时货物箱1内的物品进行相同频率的晃动,在晃动的同时带动夹紧板82进行同步运动,使得夹紧板82带动与其固定连接的第一电容板831在第二电容板832上滑动,由于第一电容板831与第二电容板832发生位移,使得电势差发生改变,同时晃动的频率与电势差的变化值呈正比关系,进而通过电势差的变化值间接得到晃动的频率,然后电脑系统通过晃动的频率控制通入线圈842内部的电流,使得线圈842产生与磁块841相斥的磁力大小与晃动的频率呈正向关系,进而实现了夹紧板82对物品的夹紧程度与晃动的频率呈正向关系的目的,从而达到了可以根据路面的崎岖程度来合理适配对物品的夹紧程度的效果。
43.进一步,锥形管572的管径由左端向右端有逐渐变大的趋势,喷气管563与摄像头4为倾斜设置。
44.进一步,夹紧板82上开设有等距分布的齿槽,第一电容板831在第二电容板832上滑动。
45.本实施例的具体使用方式与作用:
46.使用时,首先安全巡逻机器人通过行走组件2进行正常行走完成巡逻工作,通过电脑系统控制摄像头4进行来回转动,将摄像头4摄入到的图像传输至电脑系统,进而电脑系统判断是否有险情、是否有呼救人员,若发现险情和呼救人员,摄像头4对呼救人员的用户身份进行识别,识别成功后巡逻机器人将手电筒、食物等救助物品运输到指定的救助地点。
47.进一步的,在冬季寒冷天气来临时,摄像头4上的镜片存在结冰雾化的情形,此时电脑系统判断出这一情形,启动电机53带动扇叶杆54进行转动,同时对加热丝55内部通入电流,使得加热丝55对周围的空气进行加热,扇叶杆54在转动的同时将外部的空气通过风滤板52抽运到风筒51的内部,随后气体经过加热丝55被加热运输到第一通风管561的内部,
然后第一通风管561的内部的加热气体经过维持管562和喷气管563向外对摄像头4上的镜片喷出,进而实现了对镜片上冰块和雾气进行加热的目的,从而达到去除冰块和雾气的效果。
48.进一步的,由于外部空气需经过风滤板52进入到风筒51的内部,且风滤板52上开设有分布均匀的通孔,使得可以将外部的杂质进行有效过滤,从而解决了因杂质进入造成内部元件损坏的问题。
49.进一步的,在加热气体通过维持管562向喷气管563处运输时,由于维持管562的内部设置有等距分布的锥形管572,且锥形管572的管径有左侧向右侧有逐渐增大的趋势,气体从小孔进、大孔出,出孔气体受到膨胀,使得流速减小,使得气体的热量得以稳定维持,由于锥形管572的轴向内侧壁上开设有等距分布的凸块571,使得气体得以有轨迹的运动,从而提高气体的冲击力。
50.进一步的,在风筒51内的气体向第一通风管561内运输的同时,风筒51的部分气体进入到第二通风管61内,然后通过主流管62向外排出,由于主流管62的上侧开设有分支管63,且分支管63所处的位置与喷气管563相对应,同时分支管63的管径小于主流管62的管径,使得主流管62在向外排出气体的将分支管63上处的气体引入到主流管62内并且向外排出,进而实现了摄像头4镜片处的加热气体得以快速循环流动的目的,从而达到快速去除冰块和雾气的效果。
51.进一步的,在巡逻机器人在装备救助物品时,由于货物箱1的内部设置有分隔板7,使得可以将救助物品分类收纳,从而达到了在取用时方便便捷的效果,同时救助物品放入到由分隔板7分隔成的区间内,通过夹紧板82对物品进行夹紧,由于夹紧板82上开设有分布均匀的齿槽,使得对物品的夹紧度更佳,从而达到减少物品因崎岖路面影响所晃动的程度。
52.进一步的,在巡逻机器人运输救助物品遇到崎岖路面时,使得货物箱1受颠簸影响进而产生晃动,同时货物箱1内的物品进行相同频率的晃动,在晃动的同时带动夹紧板82进行同步运动,使得夹紧板82带动与其固定连接的第一电容板831在第二电容板832上滑动,由于第一电容板831与第二电容板832发生位移,使得电势差发生改变,同时晃动的频率与电势差的变化值呈正比关系,进而通过电势差的变化值间接得到晃动的频率,然后电脑系统通过晃动的频率控制通入线圈842内部的电流,使得线圈842产生与磁块841相斥的磁力大小与晃动的频率呈正向关系,进而实现了夹紧板82对物品的夹紧程度与晃动的频率呈正向关系的目的,从而达到了可以根据路面的崎岖程度来合理适配对物品的夹紧程度的效果。
53.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1