清洁机器人部署方法及系统与流程
1.本发明涉及智能机器人清洁的技术领域,具体地,涉及清洁机器人部署方法及系统,尤其涉及一种清洁机器人快速部署方法及系统。
背景技术:
2.现在在清洁领域,使用智能机器人对酒店卫生间清扫属于空白领域,酒店卫生间清扫基本是人力清扫。使用智能机器人取代人力,是可行的也是前景广阔的一个市场。在清扫机器人进驻酒店之前,一般需要调试人员先针对酒店环境进行部署调试,但是酒店清扫的流程复杂,也给部署带来了很大的挑战,如何快速的部署是当前需要解决的技术问题。
3.在公开号为cn112677154a的专利文献中公开了一种人工智能清洁机器人协同清洁方法及系统,该方法包括:步骤1:根据清洗太阳能电池板或定日镜地图的面积,控制中心派出一定数量的机器人分散到需要清洗面积的各个位置;步骤2:对各个位置的太阳能电池板或定日镜进行评估,并把结果发送至控制中心;步骤3:控制中心在评估清洁需求和机器人清洁能力后根据部署逻辑得到部署方案,重新部署机器人;步骤4:每次部署并完成清洁任务后,利用机器学习方法对部署方案和机器人能力进行大数据分析,不断优化部署逻辑。
4.因此,需要提出一种技术方案以改善上述技术问题。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种清洁机器人部署方法及系统。
6.根据本发明提供的一种清洁机器人部署方法,所述方法包括如下步骤:
7.步骤s1:将机械臂安装放置在移动底盘上,移动底盘带着机械臂自主导航至预设擦洗任务附近位置;
8.步骤s2:移动底盘带着机械臂移动到台盆前方预设位置附近之后,部署时视觉系统构建台盆的三维点云模型,视觉系统安装在机械臂末端;
9.步骤s3:采用外部位置引导实时轨迹跟随规划方法,通过外围设备去控制机械臂末端移动,机械臂控制相机扫图构建三维点云模型。
10.优选地,所述步骤s2还包括机械臂控制器控制机械臂运动和控制相机开始扫图,相机存储数据构建三维点云模型。
11.优选地,所述步骤s2包括如下步骤:
12.步骤s2.1:移动底盘到达预设位置之后,穿戴在手上的可穿戴移动设备控制机械臂;
13.步骤s2.2:按下开始按钮,基于mqtt协议,可穿戴移动设备与机械臂控制器进行通讯数据传输;
14.步骤s2.3:按下开始按钮后可穿戴移动设备通过mqtt协议将开始命令发给机械臂控制器,机械臂控制器收到开始命令;
15.步骤s2.4:可穿戴移动设备会按固定频率基于mqtt协议将当前设备位置数据发给
机械臂控制器。
16.优选地,所述步骤s2.3还包括激活机械臂外部位置引导实时跟踪功能,械臂控制器给视觉系统发送开始扫图命令。
17.优选地,所述步骤s3包括如下步骤:
18.步骤s3.1:机械臂收到开始命令,机械臂控制系统控制相机拍照,可穿戴移动设备每隔固定周期10*servo_cycle_time将可穿戴移动设备的位置发送给机械臂控制系统;
19.步骤s3.2:机械臂采集每个周期的可穿戴移动设备位置posc(i),将数据发送给机械臂控制器系统;
20.步骤s3.3:机械臂控制器系统根据数据点集,采用实时跟随调整方法,计算规划位置,规划机械臂末端位置;
21.步骤s3.4:机械臂以末端初始位置posd(0)为起点,规划末端轨迹;
22.步骤s3.5:将可穿戴移动设备的位置点集posc(i)位置做为输入,每次取50个周期的位置为一个移动窗口;
23.步骤s3.6:机械臂末端实时跟随位置,机械臂接受相机的返回状态,当相机返回当前采集数据结束时,机械臂即认为路径结束。
24.本发明还提供一种清洁机器人部署系统,所述系统包括如下模块:
25.模块m1:将机械臂安装放置在移动底盘上,移动底盘带着机械臂自主导航至预设擦洗任务附近位置;
26.模块m2:移动底盘带着机械臂移动到台盆前方预设位置附近之后,部署时视觉系统构建台盆的三维点云模型,视觉系统安装在机械臂末端;
27.模块m3:采用外部位置引导实时轨迹跟随规划系统,通过外围设备去控制机械臂末端移动,机械臂控制相机扫图构建三维点云模型。
28.优选地,所述模块m2还包括机械臂控制器控制机械臂运动和控制相机开始扫图,相机存储数据构建三维点云模型。
29.优选地,所述模块m2包括如下模块:
30.模块m2.1:移动底盘到达预设位置之后,穿戴在手上的可穿戴移动设备控制机械臂;
31.模块m2.2:按下开始按钮,基于mqtt协议,可穿戴移动设备与机械臂控制器进行通讯数据传输;
32.模块m2.3:按下开始按钮后可穿戴移动设备通过mqtt协议将开始命令发给机械臂控制器,机械臂控制器收到开始命令;
33.模块m2.4:可穿戴移动设备会按固定频率基于mqtt协议将当前设备位置数据发给机械臂控制器。
34.优选地,所述模块m2.3还包括激活机械臂外部位置引导实时跟踪功能,械臂控制器给视觉系统发送开始扫图命令。
35.优选地,所述模块m3包括如下模块:
36.模块m3.1:机械臂收到开始命令,机械臂控制系统控制相机拍照,可穿戴移动设备每隔固定周期10*servo_cycle_time将可穿戴移动设备的位置发送给机械臂控制系统;
37.模块m3.2:机械臂采集每个周期的可穿戴移动设备位置posc(i),将数据发送给机
械臂控制器系统;
38.模块m3.3:机械臂控制器系统根据数据点集,采用实时跟随调整系统,计算规划位置,规划机械臂末端位置;
39.模块m3.4:机械臂以末端初始位置posd(0)为起点,规划末端轨迹;
40.模块m3.5:将可穿戴移动设备的位置点集posc(i)位置做为输入,每次取50个周期的位置为一个移动窗口;
41.模块m3.6:机械臂末端实时跟随位置,机械臂接受相机的返回状态,当相机返回当前采集数据结束时,机械臂即认为路径结束。
42.与现有技术相比,本发明具有如下的有益效果:
43.1、本发明解决扫图过程繁琐,操作复杂的痛点,机械臂自动跟随外部设备,辅助部署,具有智能化,大大提升打扫效率。
44.2、本发明提供的方法,免去了人工操作示教器控制机械臂运动,采用实时跟随外围设备的方法,免去了人工去操作示教器,效率高;
45.3、部署流程模块化,只需要手握外围设备即可控制机械臂和相机拍照;免去了示教器操作过程以及控制器控制相机的流程,该系统方法直接将整个控制流程模块化,部署人员只需要按外围设备启停即可,不用再去操作复杂的界面。
附图说明
46.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
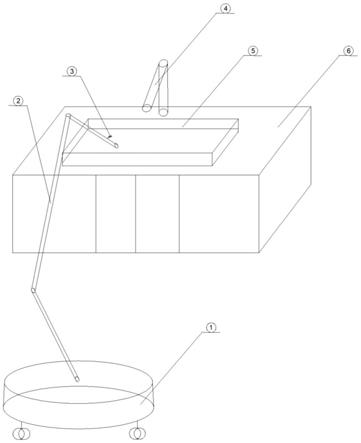
47.图1为本发明的系统结构图;
48.图2为本发明的系统通讯流程图;
49.图3为本发明末端跟随轨迹示意图;
50.图4为本发明机械臂末端位置示意图。
51.移动底盘1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
水龙头4
52.机械臂2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
台盆5
53.相机3
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
台面6
具体实施方式
54.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
55.本发明要解决的技术问题是:采用外围穿戴设备控制机械臂末端移动,机械臂控制器能够读取可穿戴设备的数据;可穿戴设备移动时,机械臂末端能够实时跟随穿戴设备的轨迹,故系统能够和外围穿戴设备通讯,获取设备的位置数据,然后机械臂控制器采用外部位置引导实时跟随轨迹方法,保证机械臂末端能够实时跟随穿戴设备的轨迹。
56.本发明提供一种清洁机器人部署方法及系统,包括如下步骤:
57.步骤s1:将机械臂安装放置在移动底盘上,移动底盘带着机械臂能够自主导航至
预设擦洗任务附近位置。
58.步骤s2:移动底盘带着机械臂移动到台盆前方预设位置附近之后,部署时视觉系统首先需要构建台盆的三维点云模型,视觉系统安装在机械臂末端。此文描述的快速部署系统方法为机械臂控制器会先控制机械臂运动,同时控制相机开始扫图,然后相机存储数据构建三维点云模型。
59.快速部署系统方法详细流程描述为:移动底盘到达预设位置之后,穿戴在手上的可穿戴移动设备,可以控制机械臂;按下开始按钮,基于mqtt协议,可穿戴设备与机械臂控制器进行通讯数据传输;按下开始按钮后穿戴设备通过mqtt协议将开始命令发给机械臂控制器,机械臂控制器收到开始命令,会激活机械臂外部位置引导实时跟踪功能,同时机械臂控制器给视觉系统发送开始扫图命令。移动穿戴设备会按固定频率基于mqtt协议将当前设备位置数据发给机械臂控制器。
60.步骤s3:采用外部位置引导实时轨迹跟随规划方法,通过外围设备去控制机械臂末端移动,同时机械臂会控制相机扫图构建三维点云模型。
61.外部位置引导实时轨迹跟随规划方法详细描述为:机械臂收到开始命令,机械臂控制系统会控制相机拍照,同时穿戴设备每隔固定周期10*servo_cycle_time将穿戴设备的位置发送给机械臂控制系统,机械臂采集了每个周期的穿戴设备位置posc(i),并将数据发送给了机械臂控制器系统,机械臂控制器系统根据这些数据点集,接着采用实时跟随调整方法,去计算规划位置,规划机械臂末端位置,保证机械臂末端的轨迹和posc(i)点集的轨迹一样;机械臂以末端初始位置posd(0)为起点,规划末端轨迹;将穿戴设备的位置点集posc(i)位置做为输入,每次取50个周期的位置做为一个移动窗口,机械臂末端去实时跟随这些位置,同时机械臂会接受相机的返回状态,当相机返回当前采集数据结束时,机械臂即认为路径结束。
62.每次取50个周期的位置做为一个移动窗口,机械臂去实时跟随这些位置点,实时跟随轨迹规划为基于五次多项式的实时跟随轨迹规划方法,其具体描述如下:
63.所采用的五次多项式方程描述如下:
64.q
t
=a0+a1*t+a2*t2+a3*t3+a4*t4+a5*t565.其中q
t
为t时刻的位置,t为当前的时刻,a0,a1,a2,a3,a4,a5即为该描述方程的一些待求解的参数;其求解过程即为求解a0、a1、a2、a3、a4、a5。
66.本方法中的约束条件初始时刻:q0=s0;结束位置:qf=s1;
67.s0为每个移动窗口初始时刻机械臂的末端位置,v0为每个移动窗口初始时刻机械臂的末端速度,a0为每个移动窗口初始时刻机械臂的末端加速度,t=0时刻的参数;q0是初始时刻的位置;qf是每个移动窗口结束时刻的位置;s1为每个移动窗口结束时刻机械臂的末端位置,v1为每个移动窗口结束时刻机械臂的末端速度,a1为每个移动窗口结束时刻机械臂的末端加速度;为初始位置的导数,也是速度,为初始速度的导数,也是初始加速度;为结束位置的导数,也是结束位置的速度,为结束速度的导数,也是结束时的加速度。
68.根据约束条件推导,可得:
69.a0=s0;
70.a0+a1*tf+a2*t
f2
+a3*t
f3
+a4*t
f4
+a5*t
f5
=s1;
71.a1=v0;
72.a1+2*a2*tf+3*a3*t
f2
+4*a4*t
f3
+5*a5*t
f4
=v1;
73.2*a2=a0;
74.2*a2+6*a3*tf+12*a4*t
f2
+20*a5*t
f3
=a1;
75.上述6个方程联立求解,求得:
76.a0=s0;
77.a1=v0;
[0078][0079][0080][0081][0082]
其中其中tf为固定值和伺服插补周期相乘得到,本案中取为固定值和伺服插补周期相乘得到,本案中取为固定值和伺服插补周期相乘得到,本案中取为伺服插补周期,本案中取为4ms。
[0083]
对于每个移动窗口:s0为每个移动窗口的初始位置,即上一移动窗口的结束位置posd((n-1)*tf),n从1开始,表示第n个移动窗口,刚开始跟随时为posd(0),第一个移动窗口结束,跳入第二个移动窗口时,s0为第一个移动窗口结束时候的位置posd(1*tf),依此类推。
[0084]v0
为每个移动窗口的初始速度,即上一移动窗口的结束速度,刚开始跟随时速度为0,第一个移动窗口结束,跳入第二个移动窗口时v0为第一个移动窗口结束时候的位置速度,依此类推。
[0085]
a0为每个移动窗口的初始加速度,即上一移动窗口的结束加速度,刚开始跟随时加速度为0,第一个移动窗口结束,跳入第二个移动窗口时a0为第一个移动窗口结束时候的位置加速度,依此类推。
[0086]
s1为每个移动窗口的posd(n*tf),v1为设置的期望的末端速度,a1为设置的期望的末端加速度。
[0087]
根据上述描述的实时跟随轨迹规划方法,即可在每个插补周期,生成轨迹插补末端笛卡尔位置,然后通过逆解计算得到每个关节的角度,然后将关节角度位置下发给伺服,最终实现实时跟随可穿戴设备轨迹,完成相机的扫图动作。
[0088]
本发明还提供一种清洁机器人部署系统,所述系统包括如下模块:
[0089]
模块m1:将机械臂安装放置在移动底盘上,移动底盘带着机械臂自主导航至预设擦洗任务附近位置;模块m2:移动底盘带着机械臂移动到台盆前方预设位置附近之后,部署时视觉系统构建台盆的三维点云模型,视觉系统安装在机械臂末端;机械臂控制器控制机械臂运动和控制相机开始扫图,相机存储数据构建三维点云模型。模块m2.1:移动底盘到达
预设位置之后,穿戴在手上的可穿戴移动设备控制机械臂;模块m2.2:按下开始按钮,基于mqtt协议,可穿戴移动设备与机械臂控制器进行通讯数据传输;模块m2.3:按下开始按钮后可穿戴移动设备通过mqtt协议将开始命令发给机械臂控制器,机械臂控制器收到开始命令;激活机械臂外部位置引导实时跟踪功能,械臂控制器给视觉系统发送开始扫图命令。模块m2.4:可穿戴移动设备会按固定频率基于mqtt协议将当前设备位置数据发给机械臂控制器。
[0090]
模块m3:采用外部位置引导实时轨迹跟随规划系统,通过外围设备去控制机械臂末端移动,机械臂控制相机扫图构建三维点云模型。模块m3.1:机械臂收到开始命令,机械臂控制系统控制相机拍照,可穿戴移动设备每隔固定周期10*servo_cycle_time将可穿戴移动设备的位置发送给机械臂控制系统;模块m3.2:机械臂采集每个周期的可穿戴移动设备位置posc(i),将数据发送给机械臂控制器系统;模块m3.3:机械臂控制器系统根据数据点集,采用实时跟随调整系统,计算规划位置,规划机械臂末端位置;模块m3.4:机械臂以末端初始位置posd(0)为起点,规划末端轨迹;模块m3.5:将可穿戴移动设备的位置点集posc(i)位置做为输入,每次取50个周期的位置为一个移动窗口;模块m3.6:机械臂末端实时跟随位置,机械臂接受相机的返回状态,当相机返回当前采集数据结束时,机械臂即认为路径结束。
[0091]
本发明解决扫图过程繁琐,操作复杂的痛点,机械臂自动跟随外部设备,辅助部署,具有智能化,大大提升打扫效率。
[0092]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0093]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1