一种基于机器人分拣工作站的仿真设计方法与流程
1.本发明涉及机器人仿真设计方法领域,特别涉及一种基于机器人分拣工作站的仿真设计方法。
背景技术:
2.我国正在从制造大国向制造强国迈进,制造业的竞争将愈来愈激烈,提高产品质量和生产效率将是企业在激烈竞争中获胜的关键因素之一,大量使用高性价比的机器人,在提高产品质量和生产效率的同时又减少了人力,降低生产成本,总体而言,伴随着我国制造企业的增长方式转变、人工劳动力成本的不断增加和生产自动化转型,机器人的市场前景非常广阔,将是我国制造业发展的必然趋势。
3.机器人的传统设计方法采用串联和反复的流程,其主要步骤包含任务分析、技术调研、方案评审、计算选型、绘制草图、草图评审、机械设计、图纸审核、样机试制、检验等十个阶段,与经典的机械设计流程相符,符合通用的机械产品生产流程,缺乏有效的cae手段,同时存在一般不进行设计阶段的仿真验证,从而增加出现较大设计失误的概率。
4.本
技术实现要素:
5.本发明的目的在于提供一种基于机器人分拣工作站的仿真设计方法,以解决上述背景技术中提出的存在一般不进行设计阶段的仿真验证,从而增加出现较大设计失误的概率的问题。
6.为实现上述目的,本发明提供如下技术方案:一种基于机器人分拣工作站的仿真设计方法,包括仿真建模软件方面的基础和建设方案,所述在开源软件openmodelica的基础上,对编译器、仿真求解器和代码生成引擎做了一定的优化,所述开发的hb-robot软件具备多模式可视化建模、多个外部软件接口和模型管理功能,在开源软件openmodelica的基础上,开发了串联、并联、系统多个模型库,改善的openmodelica软件支持符合fmi规范的多种场景,开发的hb-robot支持部分api和数据协议接口的开发;
7.所述开发面向对象程序设计的机器人领域使用的通用型研发、设计、应用与控制建模仿真分析一体化平台软件hb-robot,所述开发机器人领域通用型统一建模仿真平台及大型案例,所述开发电机、传感器、控制器、执行器、机构、减速器6类通用组件模型库,并且开发机器人喷涂工作站模型库、机器人打磨工作站模型库、机器人焊接工作站模型库、机器人搬运及码垛模型库、机器人抛光模型库、机器人装配模型库、可拆装工业机器人模型库、agv模型库,以及开发用于产品技术迭代和机理认知的工业仿真分析app,所述完成多领域统一建模和虚拟仿真调试的流程建设,再开发技术路线及技术指标。
8.优选的,所述机器人领域用的通用型统一建模仿真平台hb-mrobot具备一下功能:
9.支持多种工业机器人的三维设计;
10.支持运动学和动力学仿真、静力学仿真、电机选型;
11.支持三维轻量化功能,具备机器人设计知识库;
12.提供特征造型、参数化设计、混合建模功能,实现机器人零部件快速设计;
13.具备装配操作、干涉检查功能;
14.具备实时的装配评价与运动模拟。
15.优选的,所述建模仿真平台hb-mrobot在机器人设计过程中能实现下功能:
16.在不接触实际机器人及其工作环境的情况下,提供机器人、配套工具、应用现场的计算机模拟,进行虚拟环境下的交互;
17.在设计阶段对运动轨迹进行模拟,计算运动过程中各关节的力矩参数,进而完成电机、减速器的选型验证;
18.通过动力学、静力学模拟及分析,有效避免机器人与环境物体干涉、运动不可达、电机参数不合适问题;
19.该软件可以实现并联机器人、串联机器人、移动机器人、协作机器人多种、多类机器人运动学、动力学机器人仿真;
20.该软件可实现机器人工作站、机器人生产线的仿真及分析。
21.优选的,所述电机模型库分为串联、并联、协作、移动机器人,也可以分为喷涂、打磨、搬运、码垛、agv机器人,不同类型的机器人要用到各类电机作为驱动的核心源部件,建立机器人设计用的专用模型库,按照电机的类型分类包括:
22.直流电机;
23.交流电机;
24.步进电机;
25.直线电机;
26.音圈电机。
27.优选的,为了设计方便,在不同类型的电机基础上,结合市场上市场占有率比较大的电机品牌,按照功率、惯量、传感器进行分类,又产生下类别:
28.小功率交流伺服电机;
29.大功率交流伺服电机;
30.是否带抱闸、绝对编码器还是相对编码器;
31.按照惯量进行分类,是小惯量、中惯量还是大惯量。
32.优选的,所述传感器模型库是工业机器人主机上常用的传感器为绝对光电码盘、相对光电码盘、电流传感器、电压传感器,工业机器人的配套执行部件夹具、快换夹头、喷枪、焊接头零部件需要的传感器包括电流、电压、能耗、行程开关、光电开关、位移传感器,以机器人为核心的大自动化系统需要的传感器包括电磁、霍尔、光电、压力、流量、温度、湿度传感器。
33.优选的,所述控制器模型库是机器人本体中常用的控制方法为反馈控制、前馈控制;
34.所述执行器模型库是机器人本体的执行器包括电磁离合、抱闸、风扇、电磁阀、开关、继电器、保险、弹簧、阻尼器,机器人系统集成方案中的执行器包括开关、气缸、电缸、阻挡器、直线轴承、弹簧、导轨、滑块、链条、齿轮。
35.优选的,所述机构模型库机器人主机的机构模型包括关节、底座、支撑部件、装饰部件、球关节、直线副、齿轮副、预紧力,机器人系统集成方案中的机构模型包括输送线、线架、夹具、转台、提升机构、顶升平移机构。
36.优选的,所述减速器模型库是机器人减速器模型包括谐波、摆线针、齿轮减速器,机器人系统集成方案中包括丝杠螺母、齿轮、皮带轮、齿轮齿条、锥齿轮、伞齿轮减速器。
37.本发明的技术效果和优点:本发明能够支持机器人共性技术领域的建模、仿真研究,包括机器人结构拓扑优化设计、机器人动力学优化设计、机器人柔性关节建模、机器人振动抑制算法开发等,从而降低机器人设计的失误概率。
附图说明
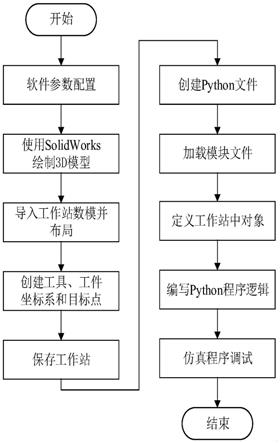
38.图1为本发明的建模仿真编译流程示意图。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.具体实施例一:
41.如图1所示,包括仿真建模软件方面的基础和建设方案,在开源软件openmodelica的基础上,开源软件openmodelica能实现编译、求解、仿真和代码生成功能,但是模型复杂后,求解效率和同时解方程的数量偏低。在机器人应用领域,针对机器人的动力学和运动学仿真需要大量的数据计算,在机器人系统集成方案中,更是存在大量的多领域模型,因此导致同时求解的方程数量呈几何倍数增长,对openmodelica的编译器、仿真求解器和代码生成引擎都做了一定的优化工作,提升了这些方面的性能,对编译器、仿真求解器和代码生成引擎做了一定的优化;
42.如图1所示,开发的hb-robot软件具备多模式可视化建模、多个外部软件接口和模型管理功能,在建模仿真之前,需要对显示和cad参数进行配置,以便顺利地导入三维模型和流畅地进行离线仿真。如果hb-robot的在线库中没有所需模型,可以通过solidworks绘制模型,然后与在线库中的模型一起导入工作站中并布局,再创建模型的工具、工件坐标系和目标点,完成之后保存工程,一个虚拟工作站则创建完毕,接下来进行离线编程,创建python脚本程序,在程序中导入robodk、robolink及redis等库文件,分别用来和robodk进行socket连接、模型对象获取和连接redis数据库;
43.如图1所示,在开源软件openmodelica的基础上,开发了串联、并联、系统多个模型库,改善的openmodelica软件支持符合fmi规范的多种场景,开发的hb-robot支持部分api和数据协议接口的开发,hb-robot软件使用过程中涉及到三维模型建立和调用、多领域仿真和机器人指令编程与测试等诸多功能,因此该软件开发了诸多api结构和数据协议接口,方便客户的使用。
44.具体实施例二:
45.如图1所示,开发面向对象程序设计的机器人领域使用的通用型研发、设计、应用与控制建模仿真分析一体化平台软件hb-robot,开发机器人领域通用型统一建模仿真平台及大型案例,开发电机、传感器、控制器、执行器、机构、减速器6类通用组件模型库,并且开发机器人喷涂工作站模型库、机器人打磨工作站模型库、机器人焊接工作站模型库、机器人
搬运及码垛模型库、机器人抛光模型库、机器人装配模型库、可拆装工业机器人模型库、agv模型库,以及开发用于产品技术迭代和机理认知的工业仿真分析app,完成多领域统一建模和虚拟仿真调试的流程建设,再开发技术路线及技术指标;
46.如图1所示,机器人领域用的通用型统一建模仿真平台hb-mrobot具备一下功能:
47.支持多种工业机器人的三维设计;
48.支持运动学和动力学仿真、静力学仿真、电机选型;
49.支持三维轻量化功能,具备机器人设计知识库;
50.提供特征造型、参数化设计、混合建模功能,实现机器人零部件快速设计;
51.具备装配操作、干涉检查功能;
52.具备实时的装配评价与运动模拟;
53.如图1所示,建模仿真平台hb-mrobot在机器人设计过程中能实现下功能:
54.在不接触实际机器人及其工作环境的情况下,提供机器人、配套工具、应用现场的计算机模拟,进行虚拟环境下的交互;
55.在设计阶段对运动轨迹进行模拟,计算运动过程中各关节的力矩参数,进而完成电机、减速器的选型验证;
56.通过动力学、静力学模拟及分析,有效避免机器人与环境物体干涉、运动不可达、电机参数不合适问题;
57.该软件可以实现并联机器人、串联机器人、移动机器人、协作机器人多种、多类机器人运动学、动力学机器人仿真;
58.该软件可实现机器人工作站、机器人生产线的仿真及分析;
59.如图1所示,电机模型库分为串联、并联、协作、移动机器人,也可以分为喷涂、打磨、搬运、码垛、agv机器人,不同类型的机器人要用到各类电机作为驱动的核心源部件,建立机器人设计用的专用模型库,按照电机的类型分类包括:
60.直流电机;
61.交流电机;
62.步进电机;
63.直线电机;
64.音圈电机;
65.如图1所示,为了设计方便,在不同类型的电机基础上,结合市场上市场占有率比较大的电机品牌,按照功率、惯量、传感器进行分类,又产生下类别:
66.小功率交流伺服电机;
67.大功率交流伺服电机;
68.是否带抱闸、绝对编码器还是相对编码器;
69.按照惯量进行分类,是小惯量、中惯量还是大惯量;
70.如图1所示,传感器模型库是工业机器人主机上常用的传感器为绝对光电码盘、相对光电码盘、电流传感器、电压传感器,工业机器人的配套执行部件夹具、快换夹头、喷枪、焊接头零部件需要的传感器包括电流、电压、能耗、行程开关、光电开关、位移传感器,以机器人为核心的大自动化系统需要的传感器包括电磁、霍尔、光电、压力、流量、温度、湿度传感器;
71.控制器模型库是机器人本体中常用的控制方法为反馈控制、前馈控制;
72.如图1所示,执行器模型库是机器人本体的执行器包括电磁离合、抱闸、风扇、电磁阀、开关、继电器、保险、弹簧、阻尼器,机器人系统集成方案中的执行器包括开关、气缸、电缸、阻挡器、直线轴承、弹簧、导轨、滑块、链条、齿轮;
73.如图1所示,机构模型库机器人主机的机构模型包括关节、底座、支撑部件、装饰部件、球关节、直线副、齿轮副、预紧力,机器人系统集成方案中的机构模型包括输送线、线架、夹具、转台、提升机构、顶升平移机构;
74.如图1所示,减速器模型库是机器人减速器模型包括谐波、摆线针、齿轮减速器,机器人系统集成方案中包括丝杠螺母、齿轮、皮带轮、齿轮齿条、锥齿轮、伞齿轮减速器。
75.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1