一种洁净机器人碰撞保护智能控制方法与流程
1.本发明涉及自动化控制领域,具体地说是一种洁净机器人碰撞保护智能控制方法。
背景技术:
2.洁净机器人是应用于在半导体设备生产线中负责晶圆搬运和传输的一种特种机器人。在工作的过程中,若发生意外状态导致机器人撞片造成手臂损坏或者晶圆破损,不仅造成一定的经济损失,而且还需设备重新拆装,清理和调试造成产能下降,甚至对工作人员的人身安全造成影响,所以对洁净机器人的碰撞保护控制方法研究具有重要意义。
3.目前对机器人的碰撞保护的研究有:利用外部传感器的加入,包括六维力矩传感器或者关节扭矩传感器以及感知传感器等,其中力矩传感器和扭矩传感器的精度高在机器人安全方向应用较多,但是价格偏高;感知的传感器的安装和装配对洁净机器人的本身重量和负载造成影响,甚至对机器人的正常运动范围造成干涉。
技术实现要素:
4.本发明的目的是提供一种洁净机器人的碰撞保护智能控制方法,该控制方法的主要目的是在机器人工作过程中,实时准确检测出物体发生的碰撞信息,且及时停止工作,避免造成损失。在此控制方法中,首先需要系统预测出机器人的碰撞模型即得到关于驱动器电机的关节力矩值,并且经过实验验证测试模型的准确性;在正常运行时械臂受到外力的状态下进行报警,机器人停止运动。
5.本发明为实现上述目的所采用的技术方案是:一种洁净机器人碰撞保护智能控制方法,包括以下步骤:
6.通过采集机器人监测数据,构建机器人系统碰撞模型并训练;
7.根据训练后的机器人系统碰撞模型对机器人进行碰撞检测;
8.根据碰撞检测结果控制机器人动作。
9.所述机器人监测数据包括各个关节的运行速度,以及每个运行速度对应的关节的力矩值。
10.所述机器人系统碰撞模型采用bp神经网络。
11.所述训练具体为:将各个关节的运行速度(v1,v2
…
vn)作为神经网络的输入,各个关节的力矩值(t1,t2
……
tn)作为神经网络的输出,对神经网络进行训练。
12.所述神经网络隐含层h的神经元个数q:
[0013][0014]
其中,n为输入和输出神经元的个数,l为随机数。
[0015]
所述神经网络的学习过程映射通过下式实现:
[0016][0017][0018]
其中,x
ij
为输入层与隐层的权值,y
jk
为隐层与输出层的权值,隐层的输出函数为f1(
·
),输出层的函数为f2(
·
),隐层的输出节点为zk,以表示各个关节的力矩值;vi表示各个关节的运行速度。
[0019]
所述根据训练后的机器人系统碰撞模型对机器人进行碰撞检测,具体为:
[0020]
将采集的关节运行速度输入至训练后的机器人系统碰撞模型,得到预测的该关节力矩值;
[0021]
将预测的关节力矩值与采集的关节力矩值进行对比;
[0022]
若采集的关节力矩值在预测的关节力矩值设定浮动范围内,则无碰撞危险;
[0023]
否则,判定为将发生碰撞。
[0024]
所述根据碰撞检测结果控制机器人动作,具体为:当碰撞结果为将发生碰撞时,控制机器人停止动作。
[0025]
采集关节的力矩值后进行力矩滤波,具体为:过滤总线运动周期内超过阈值的力矩值。
[0026]
一种洁净机器人碰撞保护智能控制装置,包括:
[0027]
模型构建模块,用于通过采集机器人监测数据,构建机器人系统碰撞模型并训练;
[0028]
碰撞检测模块,用于根据训练后的机器人系统碰撞模型对机器人进行碰撞检测;
[0029]
控制模块,用于根据碰撞检测结果控制机器人动作。
[0030]
本发明具有以下有益效果及优点:
[0031]
(1)、在机器人控制器实时系统中,通过总线数据实时采集关节力矩值;
[0032]
(2)、碰撞保护的智能控制可以在不同类型不同机台机器人在线自动碰撞模型的创建;
[0033]
(3)、碰撞保护智能控制可以在正常机械臂正常作业时准确检测外力干扰或碰撞信息,报警且停止运行;
[0034]
(4)、设计关节力矩滤波器保证控制器的鲁棒性。
附图说明
[0035]
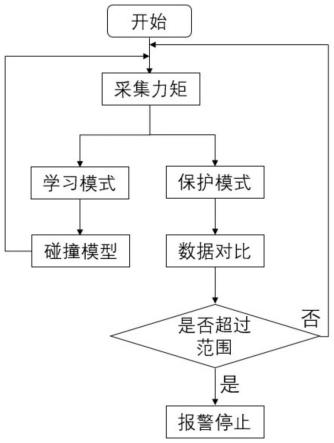
图1是洁净机器人的碰撞保护智能控制方法的逻辑框图。
[0036]
图2是碰撞模型求解的神经网络示意图。
具体实施方式
[0037]
下面结合附图及实施例对本发明做进一步的详细说明。
[0038]
本发明是提供一种机器人的碰撞保护智能控制方法,在机器人发生外力干扰和碰撞的情况下,系统能够准确检测出碰撞信息,停止机器人运动。机器人系统采取ethcat总线
运行,可通过总线配置的pdo实时采集各个关节的电流力矩值。由于每种类型的洁净机器人在不同的装配情况下数据分析得到关于驱动器电机的关节力矩值是不同的,所以在机器人控制系统中,设计学习过程,实时进行机器人碰撞模型的建立;并在开启保护的过程中,检测机器人系统是否受到外力的碰撞,并报警停止运行。研发的部分可分为在机器人控制实时系统中,通过学习过程设计系统的碰撞模型,在正常运行时进行碰撞保护的安全检测。
[0039]
图1为洁净机器人的碰撞保护智能控制方法的逻辑框图,机器人控制器启动,自动实时采集数据关节力矩值,并进行数据处理。若系统设置为学习模式,进行碰撞模型的建立,若系统设置为保护模式,将实时数据与模型进行对比,若超过安全范围则报警停止,不超过则正常运行。洁净机器人为现有技术。
[0040]
机器人系统碰撞模型
[0041]
在洁净机器人长期平稳运行的状态下,通过观察分析运行过程中的参数,得出机器人驱动器的关节力矩值与机器人的运动过程成规律性变化,且当机器人受到外力或者发生碰撞时,驱动器的关节力矩值发生明显变化;不同类型的机器人的运行状态下的关节力矩值也会有差异。在此分析的基础上,显然可以进行机器人系统的碰撞模型的构建,但此模型不唯一,不同类型的机器人应有不同的模型。所以在实时机器人系统中,引入“学习“过程,此过程采用bp神经网络方法求解碰撞模型。bp神经网络求解机器人碰撞模型的神经网络结构图如图2所示。
[0042]
包含了输入层i,隐含层h,输出层o三层网络结构。其中的输入层和输出层的神经元都为n个。(n为机器人的轴数)神经网络的输入矩阵为(v1,v2
…
vn),代表各个关节的运行速度;输出矩阵为(t1,t2
……
tn),代表各个关节的力矩值。如何设置隐含层h的神经元个数q为神经网络的关键所在。按照经验公式:
[0043][0044]
其中n为输入和输出神经元的个数,l为随机数取值范围为[1,10]。洁净机器人的轴数一般不超过4轴。为了保证机器人控制系统的实时性,所以应该提高网络速率和降低网络结构的复杂性,取m=4。此碰撞模型的bp升级网络的学习过程映射公式为:
[0045][0046][0047]
其中x
ij
为输入层与隐层的权值,y
jk
为隐层与输出层的权值,隐层的输出函数为f1(
·
),输出层的函数为f2(
·
),隐层的输出节点为zk。
[0048]
碰撞检测
[0049]
在机器人系统“学习“过程结束之后,此此台机器人设备的碰撞模型建立完成。机器人正常运行,对关节力矩值实时监测,在同一运动状态下,机器人的力矩值超过碰撞模型的最大范围,机器人立即报警,停止运动。查看机器人的运动状态是否发生碰撞。
[0050]
力矩滤波器的设计
[0051]
在对关节力矩值实时监测的过程中发现,机器人在正常运动时,关节力矩会有偶发的一个节拍的数据突变,在学习的过程中会造成模型不准确;在碰撞检测的过程中会造成错误报警。所以设计力矩滤波器选择指定频段的信号通过,使用有用的信号抑制噪声信号,把偶发单节拍的过大数据滤掉,保证设计的控制器的稳定性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1