一种高效封边带切断系统的制作方法
1.本发明涉及石膏板生产技术领域,具体涉及一种高效封边带切断系统。
背景技术:
2.石膏板在生产中通常使用封边带对定长切削后的石膏板进行包边美化,且有一条封边带同时对传输带上的多个石膏板进行封边,需要使用切刀在相邻石膏板缝隙处切断封边带以使相邻石膏板分离。
3.现有技术中由于石膏板流水线作业传输,绝大多数情况下切刀位置固定。而在切刀断带过程中,由于传输带传送石膏板过程中惯性及摩擦力等因素,容易造成前一石膏板与后一石膏板之间缝隙位置发生变化,切刀位置固定,则不能保证切刀每次在相邻石膏板缝隙处下刀,容易切割到石膏板,导致石膏板受损。
技术实现要素:
4.本发明的目的在于提供一种高效封边带切断系统,以解决现有技术中相邻石膏板间缝隙宽度不固定而切刀位置固定,容易导致切刀在切断封边带时误切石膏板的技术问题。
5.为解决上述技术问题,本发明具体提供下述技术方案:
6.一种高效封边带切断系统,包括:
7.激光测距传感器,正对石膏板传输带设置,用于监测相邻石膏板之间缝隙宽度;
8.伺服驱动系统,驱动切刀移动到指定切刀位置,并驱动所述切刀执行切带动作;
9.切刀,与所述伺服驱动系统连接,在所述伺服驱动系统驱动下切割封边带;
10.控制器,所述激光测距传感器和所述伺服驱动系统均与所述控制器连接,所述控制器接收所述激光测距传感器的电流反馈信号并将所述电流反馈信号转换为位置信息,所述控制器根据所述位置信息发送指令至所述伺服驱动系统,所述伺服驱动系统驱动所述切刀移动到相邻石膏板缝隙位置并切断封边带。
11.作为本发明的一种优选方案,所述伺服驱动系统包括滑轨和安装在所述滑轨上的滑台底座,以及与所述控制器通讯连接的伺服驱动电机和切断气缸,所述切刀与所述切断气缸的活塞轴连接;
12.所述伺服驱动电机连接在所述滑台底座上并驱动所述滑台底座沿所述滑轨移动,所述切断气缸安装在所述滑台底座上并跟随所述滑台底座移动,所述切断气缸带动所述切刀移动到指定位置时,所述切断气缸驱动所述切刀移动以执行切带动作;
13.在所述滑台底座上设置有增强结构,所述增强结构用于减小所述切断气缸驱动所述切刀时产生的后坐力以保持所述切刀稳定。
14.作为本发明的一种优选方案,所述增强结构包括限位板和设置在所述限位板表面的缓冲垫,所述限位板安装在所述滑台底座上,所述缓冲垫设置在所述限位板上;
15.其中,所述限位板设置在所述切刀两侧,所述缓冲垫正对所述切断气缸侧面,所述
限位板用于对所述切断气缸及所述切刀进行限位以减小所述切断气缸及所述切刀因后坐力发生晃动的幅度。
16.作为本发明的一种优选方案,所述增强结构还包括减震弹簧,所述减震弹簧设置在所述滑台底座底部,所述减震弹簧用于缓冲后坐力的影响,避免后座力传递到所述滑轨上导致所述滑轨变形;
17.在所述滑轨上设置有限位块,在所述限位块上安装有套筒,在所述套筒内设置有伸缩轴,所述伸缩轴的一端部同轴安装在所述套筒内,所述伸缩轴的另一段部安装在所述滑台底座上,所述滑台底座受后坐力影响时,向所述滑轨一侧振动挤压时,所述伸缩轴与所述减震弹簧同步伸缩移动,以缓冲因后坐力对所述滑轨的振动挤压。
18.作为本发明的一种优选方案,在所述石膏板传输架设有测距板,所述激光测距传感器安装在所述测距板上,且所述激光测距传感器的检测端头高度一致且正对所述石膏板侧部;
19.所述激光测距传感器至少设置有两个,位于最外侧的两个所述激光测距传感器之间的距离大于相邻石膏板之间缝隙的宽度,所述激光测距传感器在正对石膏板间隙产生的反馈距离与正对石膏板产生的反馈距离不同,所述控制器根据最外侧两个正对缝隙的所述激光测距传感器之间的距离计算所述缝隙的中线位置。
20.作为本发明的一种优选方案,在所述切断气缸的活塞轴底部设置有切割限位杆,所述切割限位杆跟随所述切刀同步移动,所述切割限位杆用于对石膏板进行限位以防止切割时石膏板移位;
21.在所述切断气缸推出所述切刀时,所述切割限位杆跟随所述切刀向靠近所述石膏板方向移动,并夹持在石膏板表面,在所述切刀远离所述石膏板时,所述切割限位杆跟随所述切刀远离所述石膏板。
22.作为本发明的一种优选方案,所述切刀设置有两个,两个所述切刀通过切刀调节机构安装在所述切断气缸端部,所述切刀调节机构用于调节两个所述切刀之间的距离;
23.所述控制器根据所述激光测距传感器反馈的相邻石膏板间缝隙宽度,向所述切刀调节机构输送调距指令,所述切刀调节机构接收所述调距指令并调节两个所述切刀之间的距离,且使两个所述切刀与两侧预留出相等的包边宽度。
24.作为本发明的一种优选方案,所述切刀调节机构包括安装在所述切断气缸端部的对接槽,在所述对接槽内设置有定位追踪座和定位驱动件,所述切刀连接在所述定位追踪座上,所述定位驱动件与所述定位驱动件与所述控制器连接并受所述控制器调控动作;
25.所述控制器输送控制指令至所述定位驱动件,所述定位驱动件驱动所述定位追踪座移动,所述定位追踪座带动所述切刀移动到指定切刀位置时,向所述控制器发送动作完成信号,所述控制器接收所述定位追踪座的反馈信号并向所述定位驱动件发送指令以使所述定位驱动件运行停止。
26.作为本发明的一种优选方案,在所述对接槽内设置有安装杆,所述定位追踪座和所述定位驱动件安装在所述安装杆上;
27.所述定位驱动件采用微型气缸,所述微型气缸的活塞轴贯穿所述安装杆,且在所述活塞轴上连接有中分块,所述定位追踪座通过活动杆与所述中分块连接,在两侧所述定位追踪座内安装有一对光电开关,所述光电开关用于实时监测两个所述切刀之间的距离并
将检测的所述距离传输给所述控制器;
28.所述控制器调控所述滑台底座移动,且使所述中分块的中线与所述缝隙宽度中线对齐后;所述控制器根据所述激光测距传感器反馈的缝隙宽度,向所述定位驱动件发送指令,所述定位驱动件带动所述中分块移动,所述中分块通过所述活动杆带动所述定位追踪座移动,并带动所述切刀移动,在所述定位追踪座移动到使所述切刀距离两侧所述激光测距传感器距离相等且都等于所述石膏板厚度时,所述控制器控制所述定位驱动件停止工作。
29.作为本发明的一种优选方案,所述切刀的刀刃沿所述切刀刀身方向设置且所述设置在所述切刀侧部,所述刀刃跟随所述切刀向所述封边带推进移动并切断封边带。
30.本发明与现有技术相比较具有如下有益效果:
31.本发明设置了设置激光测距传感器、伺服驱动系统、切刀和控制器,通过设置激光测距传感器监测石膏板传输带上相邻石膏板之间缝隙宽度,激光测距传感器和伺服驱动系统均与控制器连接,伺服驱动系统在控制器调控下带动切刀移动跟踪相邻石膏板缝隙中线位置,再驱动切刀执行切带动作,每次追踪缝隙位置再下刀切断封边带,避免切刀未对齐石膏板缝隙下刀切割,误切石膏板。
附图说明
32.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
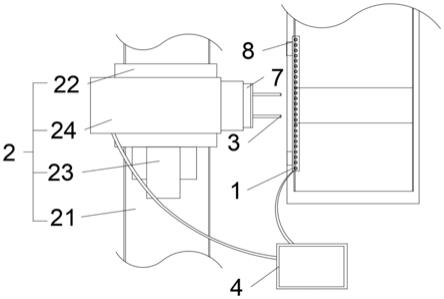
33.图1为本发明实施例提供的切断系统整体结构示意图;
34.图2为本发明实施例提供的增强结构的结构示意图;
35.图3为本发明实施例提供的切刀调节机构的结构示意图;
36.图4为本发明实施例提供的伺服驱动系统驱动切刀靠近封边带的结构示意图;
37.图中的标号分别表示如下:
38.1-激光测距传感器;2-伺服驱动系统;3-切刀;4-控制器;5-增强结构;
39.6-切割限位杆;7-切刀调节机构;8-测距板;
40.21-滑轨;22-滑台底座;23-伺服驱动电机;24-切断气缸;
41.51-限位板;52-缓冲垫;53-减震弹簧;54-限位块;55-套筒;56-伸缩轴;
42.71-对接槽;72-定位追踪座;73-定位驱动件;74-安装杆;75-活动杆;76-中分块。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.如图1所示,本发明提供了一种高效封边带切断系统,包括激光测距传感器1、伺服驱动系统2、切刀3和控制器4。
45.激光测距传感器1正对石膏板传输带设置,并用于监测石膏板传输带上相邻石膏板之间缝隙宽度,切刀3与伺服驱动系统2连接并在伺服驱动系统2驱动下移动到指定切刀位置切割封边带,激光测距传感器1和伺服驱动系统2均与控制器4连接,控制器4接收激光测距传感器1的电流反馈信号并将电流反馈信号转换为位置信息,控制器4根据位置信息发送指令至伺服驱动系统2,伺服驱动系统2驱动切刀3移动到相邻石膏板缝隙位置并切断封边带。
46.本发明实施例主要是通过设置激光测距传感器1获得相邻石膏板之间缝隙宽度,伺服驱动系统2在控制器4的调控下驱动切刀移动到缝隙宽度处再执行切带动作,每次追踪缝隙位置在下刀切断封边带,避免切刀未对齐石膏板缝隙下刀切割,误切石膏板。
47.封边带设置在石膏板边部,本实施例将激光测距传感器1架设在传输带边部靠近封边带的上方。故此,本实施方式在石膏板传输架设有测距板8,激光测距传感器1安装在测距板8上,且激光测距传感器1的检测端头高度一致且正对石膏板侧部。
48.正常相邻石膏板之间缝隙宽度可能因外界因素发生改变改变,在传输过程不发生重大事故下,石膏板间距离有一个常见的范围,为了适应石膏板不同的常见缝隙宽度,激光测距传感器1至少设置有两个,间隔设置在传输带某一位置上方,每次切刀3都在此位置附近切断封边带,故此,位于最外侧的两个激光测距传感器1之间的距离大于相邻石膏板之间缝隙常见最大宽度。
49.由于激光测距传感器1在正对石膏板间隙产生的反馈距离与正对石膏板产生的反馈距离不同(主要因石膏板厚度导致),部分激光测距传感器1发射光线至石膏板上表面后反射形成距离反馈信号,部分激光测距传感器1发射光线至传输带表面后反射形成距离反馈信号,此部分激光测距传感器1正对缝隙处,一般两侧最外侧的激光测距传感器1正对石膏板,从两侧向中间方向的激光测距传感器1,距离中间越近,激光测距传感器1越靠近缝隙中间位置,两侧最先检测到传输带表面的激光测距传感器1(多个反馈信号按照对应传感器的安装顺序,信号最先产生跳变)的垂直位置越接近缝隙两边缘,因此控制器4根据最外侧两个正对缝隙的激光测距传感器1之间的距离计算缝隙的中线位置。伺服驱动系统2驱动切刀3移动到正对缝隙中线的位置再切断封边带,大大降低误切石膏板的几率。
50.本实例中,伺服驱动系统2包括滑轨21和安装在滑轨21上的滑台底座22,以及与控制器4通讯连接的伺服驱动电机23和切断气缸24,切刀3与切断气缸24的活塞轴连接;伺服驱动电机23连接在滑台底座22上并驱动滑台底座22沿滑轨21移动,切断气缸24安装在滑台底座22上并跟随滑台底座22移动,切断气缸24带动切刀3移动到指定位置(指相邻石膏板缝隙中线位置)时,切断气缸24驱动切刀3移动以执行切带动作。
51.切断气缸24驱动切刀3切割后退时,会产生后坐力,后坐力会造成切断气缸24振动及晃动,进而带动切刀发生晃动,容易影响切刀稳定性,并且切断气缸24后退产生的后坐力会传递给底部滑台底座22及滑轨,滑台底座22和滑轨21在持续工作中不间断受到影响,容易导致滑轨21和滑台底座22变形,不利于及时定位追踪到缝隙位置,影响切带效率。
52.为此,如图2中所示,本实施例在滑台底座22上设置有增强结构5,增强结构51用于减小切断气缸24驱动切刀3时产生的后坐力以保持切刀3稳定。
53.详细地,增强结构5包括限位板51和设置在限位板51表面的缓冲垫52,限位板51安装在滑台底座22上,缓冲垫52设置在限位板51上。其中,限位板51设置在切刀3两侧,缓冲垫
52正对切断气缸24侧面,限位板51用于对切断气缸24及切刀3进行限位以减小切断气缸24及切刀3因后坐力发生晃动的幅度。在切断气缸24因后坐力发生晃动时,两侧限位板51限制切断气缸24和切刀3的晃动幅度,并在切刀3或切断气缸24接触两侧限位板51时,会直接接触缓冲垫52,缓冲垫52采用弹性橡胶,能够缓冲晃动,保持切刀3和切断气缸54相对稳定。
54.增强结构5还包括减震弹簧53,减震弹簧53设置在滑台底座22底部,减震弹簧53用于缓冲后坐力的影响,避免后座力传递到滑轨21上导致滑轨21变形。
55.详细地,在滑轨21上设置有限位块54,在限位块54上安装有套筒55,在套筒55内设置有伸缩轴56,伸缩轴56的一端部同轴安装在套筒55内,伸缩轴56的另一段部安装在滑台底座22上,滑台底座22受后坐力影响时,向滑轨21一侧振动挤压时,伸缩轴56与减震弹簧53同步伸缩移动,以缓冲因后坐力对滑轨21的振动挤压,从而降低经滑台底座22传导的后坐力对滑轨21的不良影响。
56.由于封边带绷直在石膏板侧,切刀3切断封边带时,封边带的张力变化可能会导致石膏板发生移位,可能会存在切刀误切石膏板的情况。为此本实施方式在切断气缸24的活塞轴底部设置有切割限位杆6,对石膏板进行限位,防止切断封边带时石膏板移位,而误伤石膏板。
57.如图4中所示,切割限位杆6跟随切刀3同步移动,且切割限位杆6先于切刀到达石膏板侧部,切割限位杆6用于对石膏板进行限位以防止切割时石膏板移位。在切断气缸24推出切刀3时,切割限位杆6跟随切刀3向靠近石膏板方向移动,并夹持在石膏板表面,在切刀3远离石膏板时,切割限位杆6跟随切刀3远离石膏板。
58.为了提高美观度,使用封边带对石膏板进行包边,切刀切割封边带后,多余的端部边带需要折合包裹住石膏板侧部,若切刀切断封边带后两侧端部预留的封边带长度参差不齐,影响包边后石膏板包边美观度。
59.本实施例进一步提供了一种实施例,设置两个切刀,两个切刀之间距离可调并在两个切刀两侧预留出相同的封边带长度,以便后续实施包边,并且建议预留封边带长度等于或略大于石膏板厚度。具体实施如下:
60.切刀3设置有两个,两个切刀3通过切刀调节机构7安装在切断气缸24端部,切刀调节机构7用于调节两个切刀3之间的距离;控制器4根据激光测距传感器1反馈的相邻石膏板间缝隙宽度,向切刀调节机构7输送调距指令,切刀调节机构7接收调距指令并调节两个切刀3之间的距离,且使两个切刀3与两侧预留出相等的包边宽度。
61.如图3中所示,切刀调节机构7包括安装在切断气缸24端部的对接槽71,在对接槽71内设置有定位追踪座72和定位驱动件73,切刀3连接在定位追踪座72上,定位驱动件73与定位驱动件73与控制器4连接并受控制器4调控动作;
62.控制器4输送控制指令至定位驱动件73,定位驱动件73驱动定位追踪座72移动,定位追踪座72带动切刀3移动到指定切刀位置时,向控制器4发送动作完成信号,控制器4接收定位追踪座72的反馈信号并向定位驱动件73发送指令以使定位驱动件73运行停止。
63.详细地,在对接槽71内设置有安装杆74,定位追踪座72和定位驱动件73安装在安装杆74上;定位驱动件73采用微型气缸,微型气缸的活塞轴贯穿安装杆74,且在活塞轴上连接有中分块76,定位追踪座72通过活动杆75与中分块76连接,在两侧定位追踪座72内安装有一对光电开关,光电开关用于实时监测两个切刀3之间的距离并将检测的距离传输给控
制器4。
64.控制器4调控滑台底座22移动,且使中分块76的中线与缝隙宽度中线对齐后;控制器4根据激光测距传感器1反馈的缝隙宽度,向定位驱动件73发送指令,定位驱动件73带动中分块76移动,中分块76通过活动杆75带动定位追踪座72移动,并带动切刀3移动,在定位追踪座72移动到使切刀3距离两侧激光测距传感器1距离相等且都等于石膏板厚度时,控制器4控制定位驱动件73停止工作。
65.设置两个切刀3时,切刀3将缝隙宽度内的封边带分成三部分:两侧长度相等的预留边带和中间废弃断带,为了更好地剪断封边带,切刀3的刀刃沿切刀3刀身方向设置且刀刃设置在切刀3侧部,刀刃跟随切刀3向封边带推进移动并切断封边带。
66.本发明主要应用在同一传输带使用一个封边带装置连续封边时,对相邻石膏板间封边带进行切断分离,将切刀设置为移动跟踪形式,每次切刀移动到对准相邻石膏板间缝隙位置再下刀切断封边带,避免误切石膏板。
67.以上实施例仅为本技术的示例性实施例,不用于限制本技术,本技术的保护范围由权利要求书限定。本领域技术人员可以在本技术的实质和保护范围内,对本技术做出各种修改或等同替换,这种修改或等同替换也应视为落在本技术的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1