夹具及固定装置的制作方法
1.本技术实施例涉及定位技术领域,尤其涉及一种夹具及固定装置。
背景技术:
2.工件上包括多个加工面时,例如,工件上打标的面有多个,且分置于工件的不同面上,通常需要多个定位结构,当工件定位在不同的定位结构上时露出不同的加工面,使加工设备对该加工面进行加工,但多个定位结构需要多次定位,定位繁琐,且增加了加工成本。
技术实现要素:
3.有鉴于此,本技术提供一种夹具,使一次性定位工件,并露出工件上的多个加工面。
4.第一方面,本技术提供一种夹具。夹具包括主体、夹持机构和驱动机构。夹持机构包括抵压件和多个连杆,连杆的两端分别转动地设置于抵压件和主体上,多个连杆平行设置。驱动机构包括驱动件和连接件,驱动件设置于主体上,连接件设置于驱动件上,驱动件能够驱动连接件沿第一方向移动,至少一个连杆沿第二方向滑动连接于连接件,第一方向与第二方向相交。驱动件驱动连接件移动,以通过多个连杆带动抵压件相对于主体运动,使抵压件与主体夹持工件。
5.上述夹具中,主体与抵压件夹持在主体的相对两侧,仅覆盖了工件上分别与主体和抵压件接触的部位,能够露出工件的不同侧的多个加工面,夹具仅需一次定位工件,即可使多个加工面进行加工,提高了定位效率和加工效率。
6.在一种可能的实施方式中,主体朝向抵压件的一侧设有凸出的两个销柱,两个销柱能够插入工件的孔内。
7.显然,上述实施方式中,每个销柱对应插入工件的孔内,以限制工件的五个自由度,使工件仅能够沿第二方向移动。抵压件与主体沿第二方向夹持在工件的相对两侧,使工件固定,两个销柱插入工件的两个孔,使夹具固定工件的精度提高。
8.在一种可能的实施方式中,夹持机构还包括滑动件,连接件和连杆中的一个设置有滑槽,滑动件设置于连接件和连杆中的另一个,且能够在滑槽内沿第二方向移动。
9.显然,上述实施方式中,滑动件能够在滑槽内沿第二方向移动,使第二连杆通过滑动件可滑动地连接于连接件上。
10.在一种可能的实施方式中,滑动件转动地设置于连杆或连接件上。
11.显然,上述实施方式中,滑动件转动地设置于连杆或连接件上,减小了滑动件与滑槽的槽壁之间的摩擦。
12.在一种可能的实施方式中,第一方向垂直于第二方向。
13.显然,上述实施方式中,第二连杆相对于连接件的运动方向,与驱动件驱动连接件的运动方向垂直,易于控制驱动件驱动连接件运动,并通过第二连杆带动抵压件运动。
14.在一种可能的实施方式中,驱动机构还包括弹性件和连接杆,连接杆设置于驱动
件上,且设置有止挡部,连接件滑动地设置于连杆上,止挡部和弹性件分别抵持于连接件的相对两侧。
15.显然,上述实施方式中,止挡部和弹性件分别抵持于连接件的相对两侧。弹性件使驱动件弹性抵持连接件,以通过连接件与第二连杆带动抵压件弹性抵持工件于主体上,避免抵压件抵压工件的力过大而损坏工件。
16.在一种可能的实施方式中,夹持机构还包括限位件,限位件螺纹连接于主体上,且抵持于抵压件上,且用于调节主体和抵压件的间距。
17.显然,上述实施方式中,
18.在一种可能的实施方式中,夹具还包括气管,气管设置于主体上,且沿主体朝向抵压件的方向吹气。
19.显然,上述实施方式中,限位件转动,能够调节主体和抵压件的间距,进而限制抵压件与主体夹持工件的力,进一步提高了夹具固定工件的安全可靠性。
20.在一种可能的实施方式中,驱动机构位于主体背离抵压件的一侧。
21.显然,上述实施方式中,驱动机构与抵压件分别位于主体的相对两侧,使驱动机构与夹持机构易于通过连杆连接,且整体尺寸减小。
22.第二方面,本技术还提出一种固定装置,包括机械臂和夹具。夹具包括主体、夹持机构和驱动机构。夹持机构包括抵压件和多个连杆,连杆的两端分别转动地设置于抵压件和主体上,多个连杆平行设置。驱动机构包括驱动件和连接件,驱动件设置于主体上,连接件设置于驱动件上,驱动件能够驱动连接件沿第一方向移动,至少一个连杆沿第二方向滑动连接于连接件,第一方向与第二方向相交。驱动件驱动连接件移动,以通过多个连杆带动抵压件相对于主体运动,使抵压件与主体夹持工件。主体连接于机械臂上,机械臂用于驱动夹具转动和移动。
23.上述夹具中,主体与抵压件夹持在主体的相对两侧,仅覆盖了工件上分别与主体和抵压件接触的部位,能够露出工件的不同侧的多个加工面,夹具仅需一次定位工件,即可使多个加工面进行加工,提高了定位效率和加工效率。固定装置通过机械臂驱动夹具移动和转动,使工件的多个加工面分别与加工设备相对,提高了加工效率。
附图说明
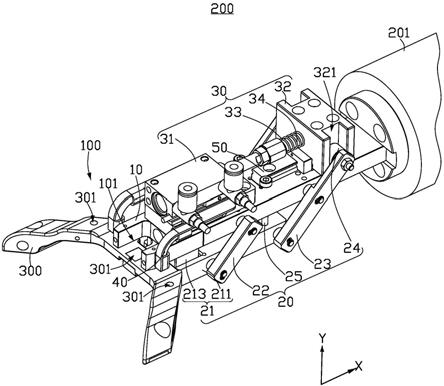
24.图1为本技术实施例提供的一种固定装置的示意图。
25.图2为图1所示固定装置中夹具在另一视角的分解示意图。
26.图3为图1所示夹具夹持工件在另一视角的示意图。
27.图4为图3所示夹具释放工件时的示意图。
28.主要元件符号说明
29.固定装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200
30.机械臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
201
31.夹具
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
32.主体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
33.销柱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
34.通孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101
35.夹持机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
36.抵压件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
37.支撑部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211
38.压块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
213
39.第一连杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
40.第二连杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23
41.滑动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24
42.限位件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
25
43.第一端
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
251
44.第二端
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
253
45.驱动机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30
46.驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31
47.连接件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32
48.滑槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
321
49.弹性件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33
50.连接杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
34
51.气管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
52.导向机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50
53.导轨
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
51
54.导向件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
53
55.第一方向
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
x
56.第二方向
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀy57.工件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300
58.加工面
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
301
59.孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302
60.如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
61.为能进一步阐述本技术达成预定申请目的所采取的技术手段及功效,以下结合附图及实施方式,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。
62.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
63.本技术一些实施方式提出一种夹具。夹具包括主体、夹持机构和驱动机构。夹持机构包括抵压件和多个连杆,连杆的两端分别转动地设置于抵压件和主体上,多个连杆平行设置。驱动机构包括驱动件和连接件,驱动件设置于主体上,连接件设置于驱动件上,驱动件能够驱动连接件沿第一方向移动,至少一个连杆沿第二方向滑动连接于连接件,第一方向与第二方向相交。驱动件驱动连接件移动,以通过多个连杆带动抵压件相对于主体运动,使抵压件与主体夹持工件。
64.上述夹具中,主体与抵压件夹持在主体的相对两侧,仅覆盖了工件上分别与主体和抵压件接触的部位,能够露出工件的不同侧的多个加工面,夹具仅需一次定位工件,即可使多个加工面进行加工,提高了定位效率和加工效率。
65.下面结合附图,对本技术的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
66.请参阅图1,本技术的一实施例提出一种固定装置200,用于定位工件300,并露出工件300的加工面301,以使加工设备对加工面301进行加工。工件300上设置有多个加工面301。固定装置200包括机械臂201和夹具100。夹具100设置于机械臂201,且用于夹持固定工件300。机械臂201可以为机器人的机械臂201,机械臂201能够驱动夹具100转动和移动,使夹具100固定的工件300上的不同加工面301对准加工设备(图未示),使加工设备能够对该加工面301进行加工。例如,加工设备可以为打标设备、打孔302设备或雕刻设备等。
67.请同时参阅图1和图2,夹具100包括主体10、夹持机构20和驱动机构30。夹持机构20包括抵压件21和多个连杆。驱动机构30与抵压件21分别位于主体10的两侧。连杆的数量为四个,包括两个第一连杆22和两个第二连杆23,但不限于此。两个第一连杆22位于主体10的相对两侧,每个第一连杆22分别可转动连接于抵压件21和主体10上。两个第二连杆23位于主体10的相对两侧,每个第二连杆23可转动连接于抵压件21和主体10上,且其中一端从主体10朝向驱动机构30延伸。两个第一连杆22和两个第二连杆23平行设置。驱动机构30包括驱动件31和连接件32。驱动件31设置于主体10上。连接件32设置于驱动件31上。驱动件31能够驱动连接件32沿第一方向x移动。第二连杆23滑动地连接于连接件32,且沿第二方向y滑动。第一方向x与第二方向y垂直,但不限于此。
68.驱动件31驱动连接件32沿第一方向x移动,使第二连杆23相对于连接件32沿第二方向y移动,以驱使第二连杆23相对于主体10和抵压件21转动,平行的多个连杆转动,使与多个连杆转动连接的主体10和抵压件21之间的距离改变,以使抵压件21靠近或远离主体10。抵压件21靠近主体10运动,直至抵压件21与主体10夹持在工件300的两侧,如图3所示。抵压件21远离主体10运动时,直至抵压件21脱离工件300,使工件300释放,如图4所示。
69.主体10与抵压件21夹持在主体10的相对两侧,仅覆盖了工件300上分别与主体10和抵压件21接触的部位,能够露出工件300的不同侧的多个加工面301,夹具100仅需一次定位工件300,即可使多个加工面301进行加工,提高了定位效率和加工效率。
70.固定装置200通过机械臂201驱动夹具100移动和转动,使工件300的多个加工面301分别与加工设备相对,提高了加工效率。
71.抵压件21同侧的多个连杆平行设置,使抵压件21的角度不变,抵压件21运动的过程中,不会相对主体10转动。且多个连杆转动,能够带动抵压件21远离主体10,且在第二方向y避让工件300,使工件300能够沿第二方向y脱离主体10。
72.可以理解,其他实施例中,连杆的数量也可以为两个、三个、八个等其他数量。例如,另一实施例中,连杆的数量为两个,分别为一个第一连杆22和一个第二连杆23,第一连杆22和第二连杆23位于抵压件21的同侧。又如,连杆的数量为六个,分别为两个第一连杆22、四个第二连杆23,每个第一连杆22与两个第二连杆23位于抵压件21的同侧。
73.连杆的数量可以根据抵压件21压持工件300的力、以及运动稳定性要求设定。
74.驱动机构30与抵压件21分别位于主体10的相对两侧,使驱动机构30与夹持机构20
易于通过连杆连接,且整体尺寸减小。可以理解,其他实施例中,驱动机构30也可以与抵压件21位于主体10的同侧,驱动机构30通过一支架(图未示)连接在主体10上,且位于抵压件21背离主体10的一侧。
75.第一方向x与第二方向y垂直,第二连杆23相对于连接件32的运动方向,与驱动件31驱动连接件32的运动方向垂直,易于控制驱动件31驱动连接件32运动,并通过第二连杆23带动抵压件21运动。可以理解,其他实施例中,第一方向x也可以与第二方向y相交的夹角为60
°
、110
°
等其他角度,当驱动件31驱动连接件32沿第一方向x移动,均能够带动第二连杆23相对于连接件32沿第二方向y移动。
76.抵压件21朝向驱动机构30的方向平行于第二方向y,但不限于此。例如,当第一方向x与第二方向y相交的夹角为60
°
时,抵压件21朝向驱动机构30的方向垂直于第一方向x,且与第二方向y相交的夹角为30
°
。
77.请参阅图1,夹持机构20还包括滑动件24。第二连杆23通过滑动件24可滑动地连接于连接件32上。连接件32设置有滑槽321。滑槽321沿第二方向y延伸。滑动件24设置于连杆上,且伸入滑槽321及沿滑槽321移动。为减小滑动件24与滑槽321的槽壁之间的摩擦,滑动件24转动地设置于第二连杆23上。滑动件24相对于滑槽321的槽壁滚动。
78.可以理解,其他实施例中,滑槽321也可以设置于第二连杆23上,滑动件24也可以设置于连接件32上。
79.滑动件24为随动轴承器,但不限于此。例如,滑动件24也可以为一胶轮结构。
80.请参阅图2和图3,驱动机构30还包括弹性件33和连接杆34。连接杆34的一端设置于驱动件31上,另一端设置有止挡部。连接件32滑动地套设于连杆上。弹性件33套设在连接杆34外。止挡部和弹性件33分别抵持于连接件32的相对两侧。弹性件33使驱动件31弹性抵持连接件32,以通过连接件32与第二连杆23带动抵压件21弹性抵持工件300于主体10上,避免抵压件21抵压工件300的力过大而损坏工件300。
81.所述夹持机构20还包括限位件25。所述限位件25螺纹连接于所述主体10上,且抵持于所述抵压件21上。限位件25转动,能够调节所述主体10和所述抵压件21的间距,进而限制抵压件21与主体10夹持工件300的力,进一步提高了夹具100固定工件300的安全可靠性。
82.抵压件21包括支撑部211和压块213。压块213设置于支撑部211上,且朝向主体10凸出于支撑部211。限位件25螺纹连接于主体10上。限位件25包括第一端251和第二端253。第一端251和第二端253分别位于主体10的相对两侧。第二端253与支撑部211抵接。旋转第一端251,使限位件25相对于主体10移动,进而改变第二端253与主体10之间的距离。可以理解,其他实施例中,支撑部211和压块213也可以一体成型。
83.请参阅图2,工件300上设置有两个孔302。主体10上设置有两个销柱11。销柱11凸出于主体10朝向抵压件21的一侧。每个销柱11对应插入工件300的孔302内,以限制工件300的五个自由度,使工件300仅能够沿第二方向y移动。抵压件21与主体10沿第二方向y夹持在工件300的相对两侧,使工件300固定,两个销柱11插入工件300的两个孔302,使夹具100固定工件300的精度提高。
84.工件300的孔302为圆孔302。两个销柱11中,一个销柱11沿径向的截面为圆形,另一个销柱11沿径向的截面为多边形。多边形截面的销柱11便于插入或脱出工件300的圆形孔302。销柱11与工件300的孔302接触的部分采用塑胶材质制成,避免了销柱11损伤工件
300的问题。
85.可以理解,其他实施例中,销柱11也可以省略。
86.可以理解,夹具100也可以采用其他用于定位工件300的定位结构。例如,夹具100还包括两个块状的定位部(图未示),两个定位部凸出设置于主体10上,工件300分别与主体10以及两个定位部接触,以限制工件300的多个自由度。
87.请参阅图2和图4,夹具100还包括气管40。气管40设置于主体10上,且朝向抵压件21吹气。当抵压件21远离主体10,并释放工件300时,气管40沿主体10朝向抵压件21的方向吹气,使气体吹至工件300上,以协助工件300脱离主体10。
88.可以理解,其他实施例中,气管40也可以省略。
89.请参阅图1,主体10上还设置有通孔101,通孔101位于两个销柱11之间,通孔101能够露出工件300的加工面301。
90.上述夹具100中,主体10与抵压件21夹持在主体10的相对两侧,仅覆盖了工件300上分别与主体10和抵压件21接触的部位,能够露出工件300的不同侧的多个加工面301,夹具100仅需一次定位工件300,即可使多个加工面301进行加工,提高了定位效率和加工效率。
91.以上实施例仅用以说明本技术的技术方案而非限制,尽管参照较佳实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换,而不脱离本技术技术方案的精神和实质。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1