一种基于多关节机械臂的安全控制系统和方法与流程
1.本发明涉及核工业机器人技术领域,特别是涉及一种基于多关节机械臂的安全控制系统和方法。
背景技术:
2.核电站换料大修期间,需要通过一次侧高水位堵板对蒸汽发生器主管道进行隔离,可保证核电站高水位时可同时进行蒸汽发生器内的其他检修工作,节省大修时间。目前一次侧高水位堵板的安装和拆除普遍采取人工操作的方式实现。蒸汽发生器内属于高辐射区域,且空间相对密闭、狭窄,在人工拆装一次侧高水位堵板过程中,存在人员受照剂量大,安装质量受人因因素影响较大的问题,国内已出现多起因人员安装质量导致一回路水大量泄露,造成核岛大面积放射性污染,因此国内外很多研究单位已经开始研究用多关节机械臂完成容器内部的工作。
3.由于多关节机械臂结合了多自由度机械链路结构、伺服驱动技术、远程实时操控技术、运动学解析等方法,且工况复杂、信号较多、目标位数量较多,受辐射干扰、人员误操作、系统逻辑异常等影响,可能引起以下安全事故:
4.(1)由于各种干扰造成程序跑飞,机械臂不按规定指令动作,与容器内壁发生碰撞;
5.(2)电机惯性过大,机械臂动作超出安全范围,使机械臂本体产生卡死;
6.(3)电气元件的老化、损坏产生错误信号,导致机械臂误动作产生机械碰撞;
7.(4)人员误操作导致机械碰撞。
技术实现要素:
8.基于此,有必要针对多关节机械臂存在的上述问题,提供一种基于多关节机械臂的安全控制系统和方法,保证多关节机械臂本体在蒸汽发生器内安全高效运行。
9.为了实现上述目的,本发明提供如下技术方案:
10.一种基于多关节机械臂的安全控制系统,包括带电工况的保护系统、失电工况的保护系统及任何工况下的保护系统;所述带电工况的保护系统在带电工况下对多关节机械臂相应关节进行接近开关限位保护、电机过载保护、电机力矩过大保护、异常状态急停保护、软件限位保护以及安全电子围栏保护;所述失电工况的保护系统在失电工况下对多关节机械臂相应关节进行失电保持保护;所述任何工况下的保护系统在任何工况下对多关节机械臂相应关节进行机械限位保护。
11.进一步地,所述多关节机械臂是将传统的六转动副关节机器人中的将第四关节替换为滑动副,包括第一关节、第二关节、第三关节、第四关节、第五关节和第六关节,所述第一关节、第二关节和第三关节依次连接组成球铰关节,所述第五关节和第六关节连接组成腕关节,所述球铰关节和腕关节通过第四关节滑动副连接。
12.进一步地,所述带电工况的保护系统包括接近限位开关、急停装置、力矩过大及过
载保护装置、软件限位装置和安全电子围栏;
13.所述多关节机械臂的各关节均配置接近限位开关,触发关节上的接近限位开关,所述带电工况的保护系统控制相应关节上的电机停止运行并发出报警信号,防止误碰撞;
14.所述急停装置设置在安全控制系统的操作端,当出现异常时,按下急停装置,所述带电工况的保护系统控制整个多关节机械臂停止运行,防止事故扩大;
15.所述力矩过大及过载保护装置监控多关节机械臂的各关节电机电流及扭矩,当关节上的电机电流及扭矩超出安全范围,所述带电工况的保护系统控制相应关节上的电机停止运行并发出报警信号,防止误碰撞;
16.所述多关节机械臂的各关节均配置软件限位装置,所述软件限位装置反馈各关节电机当前位移,当关节电机当前位移超出安全范围,所述带电工况的保护系统控制相应关节电机停止运行,防止误碰撞;
17.所述安全电子围栏设置在安全控制系统的软件端,安全电子围栏限制多关节机械臂的动作范围在安全电子围栏内,防止误碰撞。
18.进一步地,所述软件限位装置为编码器,所述编码器反馈各关节电机当前位移,当关节电机当前位移超出安全范围,所述带电工况的保护系统控制相应关节电机停止运行,防止误碰撞。
19.进一步地,所述第一关节、第二关节、第三、第四关节、第五关节和第六关节上分别配置2个、2个、1个、2个、2个和1个接近限位开关;所述第一关节、第二关节、第三关节、第四关节、第五关节和第六关节电机电流限制分别为12a、12a、12a、2a、1.5a和1.5a;所述第一关节、第二关节、第三关节、第四关节、第五关节和第六关节电机扭矩限制分别为280nm、250nm、80nm、250nm、30nm和80nm;所述第一关节、第二关节、第三、第四关节、第五关节和第六关节的软件限位装置分别反馈第一关节电机180
°
方向位移,所述第二关节的软件限位装置反馈第二关节电机140
°
方向位移,所述第三关节的软件限位装置反馈第三关节电机720
°
方向位移,所述第四关节的软件限位装置反馈第四关节电机400mm处位移,所述第五关节的软件限位装置反馈第五关节电机40
°
方向位移,所述第六关节的软件限位装置反馈第六关节360
°
方向位移。
20.进一步地,所述失电工况的保护系统包括失电保持装置,所述第二关节和第四关节均配置失电保持装置,当多关节机械臂失电时抱闸保持使多关节机械臂以及多关节机械臂上的负载保持原位,防止自重导致的多关节机械臂动作而产生误碰撞。
21.进一步地,所述任何工况下的保护系统包括机械限位保护装置,所述第一关节、第二关节、第三关节、第四关节和第五关节均配置机械限位保护装置,当多关节机械臂运动超出接近限位开关限位时,限制多关节机械臂继续运动,直至电机堵转产生超扭矩或超电流致,触发电机过载保护或电机力矩过大保护使电机停止,防止机械臂关节卡死和误碰撞。
22.本发明还提供一种基于多关节机械臂的安全控制方法,包括如下步骤:
23.(1)、安全控制系统未启动时,对多关节机械臂进行安装,失电工况的保护系统控制多关节机械臂在失电工况下保持原位;任何工况下的保护系统机械限位保护多关节机械臂,防止安装过程中多关节机械臂乱动作导致误碰撞;
24.(2)、安全控制系统启动后,在多关节机械臂执行过程中,带电工况的保护系统接近开关限位、电机电流过载保护、电机力矩过大保护、异常状态急停、软件限位以及安全电
子围栏保护多关节机械臂;任何工况下的保护系统机械限位保护多关节机械臂;如果操作过程中意外断电,失电工况的保护系统控制多关节机械臂保持原位,防止误碰撞;
25.(3)、操作完毕后断电,对多关节机械臂进行拆卸,失电工况的保护系统控制多关节机械臂保持原位,任何工况下的保护系统机械限位保护多关节机械臂,防止拆卸过程中多关节机械臂乱动作导致误碰撞。
26.进一步地,所述多关节机械臂拆装过程中,安全控制系统进行如下保护流程:安全控制系统保持断电状态,失电工况的保护系统和任何工况下的保护系统进入保护状态,多关节机械臂相应关节进入保持状态,防止机械臂因为自重而下坠,如过程中触发多关节机械臂某关节机械限位保护,该关节将停止继续动作,防止机械臂与蒸汽发生器碰撞。
27.进一步地,所述多关节机械臂执行过程中,安全控制系统进行如下保护流程:
28.第一步,多关节机械臂执行指令,安全控制系统开始对多关节机械臂进行安全保护;如果安全控制系统断电,触发失电工况的保护系统对多关节机械臂相应关节进行失电保持保护,多关节机械臂相应关节保持原位,等待处理故障;如果安全控制系统有电,进入第二步;
29.第二步,如果触发任何工况的保护系统对多关节机械臂相应关节进行机械限位保护,多关节机械臂相应关节电机堵转,从而触发多关节机械臂相应关节电机力矩过大保护或者电机电流过载保护,多关节机械臂相应关节停止动作并产生报警,等待处理故障;如果未触发任何工况的保护系统对多关节机械臂相应关节进行机械限位保护,进入第三步;
30.第三步,如果触发带电工况的保护系统对多关节机械臂相应关节进行接近限位开关保护,多关节机械臂相应关节停止动作并产生报警,等待处理故障;如果未触发带电工况的保护系统对多关节机械臂相应关节进行接近限位开关保护,进入第四步;
31.第四步,如果触发带电工况的保护系统对多关节机械臂相应关节电机力矩过大保护或电机电流过载保护,多关节机械臂相应关节停止动作并产生报警,等待处理故障;如果未触发多关节机械臂相应关节电机力矩过大保护或电机电流过载保护,进入第五步;
32.第五步,如果触发带电工况的保护系统对多关节机械臂进行安全电子围栏保护,多关节机械臂所有关节停止动作并产生报警,等待处理故障;如果未触发带电工况的保护系统对多关节机械臂进行安全电子围栏保护,进入第六步;
33.第六步,如果触发带电工况的保护系统对多关节机械臂进行异常状态急停保护,多关节机械臂所有关节停止动作并产生报警,等待处理故障;如果没有触发带电工况的保护系统对多关节机械臂进行异常状态急停保护,多关节机械臂执行指令;
34.第七步,多关节机械臂执行过程中,如果检测触发上述某一步骤的保护,将跳转至该步骤,直至多关节机械臂执行完所有指令,保护结束。
35.本发明的有益技术效果:
36.本发明的基于多关节机械臂的安全控制系统和方法,充分利用多种保护手段,实现多关节机械臂在蒸汽发生器水室内安全、高效地实施拆装及运动控制,有效缩短作业时间,同时多重保护方法的虚实结合,可防止机械臂本身的卡死及机械臂与蒸汽发生器产生的硬碰撞,保证了机械臂本体安全及核设备的安全,具有一定通用性,可推广应用到其它机电设备。
附图说明
37.图1为多关节机械臂拆装过程中安全控制系统的保护流程图;
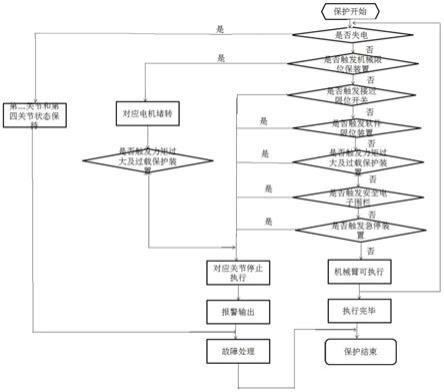
38.图2为多关节机械臂执行过程中安全控制系统的保护流程图;
39.图3为多关节机械臂各关节机械限位保护装置和接近限位开关位置示意图;
40.图4为多关节机械臂各关节失电保持装置位置示意图。
41.图中,1、第一关节;2、第二关节;3、第三关节;4、第四关节;5、第五关节;6、第六关节;7、接近限位开关;8、机械限位保护装置;9、失电保持装置。
具体实施方式
42.下面结合附图和实施例对本发明做进一步详细地描述。
43.本发明提供一种基于多关节机械臂的安全控制系统,包括带电工况的保护系统、失电工况的保护系统及任何工况下的保护系统;所述带电工况的保护系统在带电工况下对多关节机械臂相应关节进行接近开关限位保护、电机过载保护、电机力矩过大保护、异常状态急停保护、软件限位保护以及安全电子围栏保护;所述失电工况的保护系统在失电工况下对多关节机械臂相应关节进行失电保持保护;所述任何工况下的保护系统在任何工况下对多关节机械臂相应关节进行机械限位保护。
44.所述多关节机械臂是将传统的六转动副关节机器人中的将第四关节替换为滑动副,包括第一关节1、第二关节2、第三关节3、第四关节4、第五关节5和第六关节6,所述第一关节1、第二关节2和第三关节3依次连接组成球铰关节,所述第五关节5和第六关节6连接组成腕关节,所述球铰关节和腕关节通过第四关节4滑动副连接。
45.所述带电工况的保护系统包括接近限位开关7、急停装置、力矩过大及过载保护装置、软件限位装置和安全电子围栏;所述多关节机械臂的各关节均配置接近限位开关7,触发关节上的接近限位开关7,所述带电工况的保护系统控制相应关节上的电机停止运行并发出报警信号,防止误碰撞;所述急停装置设置在安全控制系统的操作端,当出现异常时,按下急停装置,所述带电工况的保护系统控制整个多关节机械臂停止运行,防止事故扩大;所述力矩过大及过载保护装置监控多关节机械臂的各关节电机电流及扭矩,当关节上的电机电流及扭矩超出安全范围,所述带电工况的保护系统控制相应关节上的电机停止运行并发出报警信号,防止误碰撞;所述多关节机械臂的各关节均配置软件限位装置,所述软件限位装置反馈各关节电机当前位移,当关节电机当前位移超出安全范围,所述带电工况的保护系统控制相应关节电机停止运行,防止误碰撞;所述安全电子围栏设置在安全控制系统的软件端,安全电子围栏限制多关节机械臂的动作范围在安全电子围栏内,防止误碰撞。
46.所述软件限位装置为编码器,所述编码器反馈各关节电机当前位移,当关节电机当前位移超出安全范围,所述带电工况的保护系统控制相应关节电机停止运行,防止误碰撞。
47.参见图3,所述第一关节1、第二关节2、第三关节3、第四关节4、第五关节5和第六关节6上分别配置2个、2个、1个、2个、2个和1个接近限位开关7;
48.所述第一关节1、第二关节2、第三关节3、第四关节4、第五关节5和第六关节6电机电流限制分别为12a、12a、12a、2a、1.5a和1.5a;
49.所述第一关节1、第二关节2、第三关节3、第四关节4、第五关节5和第六关节6电机
扭矩限制分别为280nm、250nm、80nm、250nm、30nm和80nm;
50.所述第一关节1的软件限位装置反馈第一关节1电机180
°
方向位移,所述第二关节2的软件限位装置反馈第二关节2电机140
°
方向位移,所述第三关节33的软件限位装置反馈第三关节3电机720
°
方向位移,所述第四关节4的软件限位装置反馈第四关节4电机400mm处位移,所述第五关节5的软件限位装置反馈第五关节5电机40
°
方向位移,所述第六关节6的软件限位装置反馈第六关节6 360
°
方向位移。
51.参见图4,所述失电工况的保护系统包括失电保持装置9,所述第一关节2和第四关节4均配置失电保持装置9,当多关节机械臂失电时抱闸保持使多关节机械臂以及多关节机械臂上的负载保持原位,防止自重导致的多关节机械臂动作而产生误碰撞。
52.所述任何工况下的保护系统包括机械限位保护装置8,所述第一关节1、第一关节2、第三关节3、第四关节4和第五关节5均配置机械限位保护装置8,当多关节机械臂运动超出接近限位开关7限位时,限制多关节机械臂继续运动,直至电机堵转产生超扭矩或超电流致,触发电机过载保护或电机力矩过大保护使电机停止,防止机械臂关节卡死和误碰撞。
53.本发明还提供一种基于多关节机械臂的安全控制方法,包括如下步骤:
54.(1)、安全控制系统未启动时,对多关节机械臂进行安装,失电工况的保护系统控制多关节机械臂在失电工况下保持原位;任何工况下的保护系统机械限位保护多关节机械臂,防止安装过程中多关节机械臂乱动作导致误碰撞;
55.(2)、安全控制系统启动后,在多关节机械臂执行过程中,带电工况的保护系统接近开关限位、电机电流过载保护、电机力矩过大保护、异常状态急停、软件限位以及安全电子围栏保护多关节机械臂;任何工况下的保护系统机械限位保护多关节机械臂;如果操作过程中意外断电,失电工况的保护系统控制多关节机械臂保持原位,防止误碰撞;
56.(3)、操作完毕后断电,对多关节机械臂进行拆卸,失电工况的保护系统控制多关节机械臂保持原位,任何工况下的保护系统机械限位保护多关节机械臂,防止拆卸过程中多关节机械臂乱动作导致误碰撞。
57.参见图1,所述多关节机械臂拆装过程中,安全控制系统进行如下保护流程:安全控制系统均保持断电状态,失电工况的保护系统和任何工况下的保护系统进入保护状态,第一关节2和第四关节4进入保持状态,防止机械臂因为自重而下坠,如过程中触发某关节机械限位,该关节将停止继续动作,防止机械臂与蒸汽发生器碰撞。
58.参见图2,所述多关节机械臂执行过程中,安全控制系统进行如下保护流程:
59.第一步,多关节机械臂执行指令,安全控制系统保护开始;如果安全控制系统断电,触发失电工况的保护系统失电保护,第一关节2和第四关节4立即进入保持状态,等待处理故障,如果安全控制系统有电,进入第二步安全检测;
60.第二步,如果触发某关节机械限位保护,对应电机将堵转,从而触发电机力矩过大保护或者电机电流过载保护,该关节停止动作并产生报警,等待处理故障,如未触发机械限位保护,进入第三步安全检测;
61.第三步,如果触发某关节接近限位开关7保护,该关节停止动作并产生报警,等待处理故障,如未触发接近限位开关7保护,进入第四步安全检测;
62.第四步,如果触发某关节电机力矩过大保护或电机电流过载保护,该关节停止动作并产生报警,等待处理故障,如未触发电机力矩过大保护或电机电流过载保护,进入第五
步安全检测;
63.第五步,如果触发安全控制系统安全电子围栏保护,所有关节停止动作并产生报警,等待处理故障,如未触发安全控制系统安全电子围栏保护,进入第六步安全检测;
64.第六步,如果触发安全控制系统异常状态急停保护,所有关节停止动作并产生报警,等待处理故障,如未触发安全控制系统异常状态急停保护,标示安全控制系统安全,多关节机械臂可执行指令;
65.第七步,多关节机械臂执行过程中,如果检测触发上述某一步骤的保护,将跳转至该步骤,直至多关节机械臂执行完所有指令,保护结束。
66.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1