一种基于PSD传感器的协作机器人基坐标标定方法
一种基于psd传感器的协作机器人基坐标标定方法
技术领域
1.本发明涉及一种主从协作的多自由度机器人的基坐标标定装方法,涉及一种基于psd一种基于psd传感器的机器人末端的姿态测量装置,以及基于该标定装置的多台协作工业机器人基坐标标定方法以及末端位姿转化方法。
背景技术:
2.机器人被誉为“制造业皇冠顶端的明珠”,是衡量一个国产业竞争力以及创新能力的重要标志,是全球新一代科技和产业革命的重点。协作机器人比起单机器人应用场景更加广阔,使用更加灵活,可以进行更大的负载搬运,更复杂的工件的焊接、切割、装配、喷涂,工作效率也更高。只有确定两工业机器人的相对位置,才能对两机器人的协作作业进行规划,因此对协作机器人的基坐标系进行标定十分必要。
3.现有的协作机器人的基坐标主要分为接触式测量标定与非接触式测量标定两种;接触式标定是通过两机器人末端的接触形成约束,通过构建特殊姿态完成对基坐标系的标定,常见的有轴对孔,点对点的握手法等,该种方法对测量人员的要求高,且精度难以掌控。非接触式测量主要借助ccd相机、激光跟踪仪等非接触设备对机器人末端位姿进行测量,由于测量过程中的存在坐标系中转转化引入误差。
技术实现要素:
4.为了解决上述问题,本发明结合了接触式与非接触式测量的优点,采用psd传感器作为测量设备代替接触式的点对点控制,同时又克服外部测量设备坐标转换。
5.所述基座标标定包括如下步骤:
6.s1、将psd接收装置(3)与激光发射器(4)分别安装在机器人a末端法兰(2)与机器人b的末端法兰(5)上;建立工业机器人a(1)与工业机器人b(6)基坐标系齐次变矩阵,确定机器人a(1)与机器人(b)的空间约束关系。
7.s2、根据第一步建立的空间约束关系,操作两机器人进行对接,保证激光发射器(4)发出的三束正交激光可以打到psd接受装置(3)的psd感光面(311)上;
8.s3、然后根据三个psd感光面(311)获得的位置信息计算出激光发射器三束正交激光的交点,及激光器坐标器原点o4坐标(a,b,c);
9.在psd接收装置(3)坐标系x_o_y面激光点a1的位置坐标(x1,y1,0);在psd接收装置坐标系x_o_z面激光点a2的位置坐标(x2,0,z2);在psd接收装置坐标系y_o_z面激光点a3的位置坐标(0,x3,z3);
[0010][0011]
可以建立方程:
[0012]
求解该方程可以求得激光器坐标o4原点在psd接受装置坐标系{t1}下的坐标(a,b,c)。
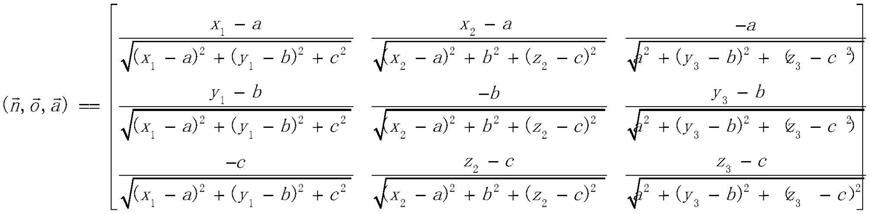
8.通过计算求得的激光器坐标o4(a,b,c),以及在psd接收装置(3)坐标系x_o_y面激光点a1的位置坐标(x1,y1,0);在psd接收装置坐标系x_o_z面激光点a2的位置坐标(x2,0,z2);在psd接收装置坐标系y_o_z面激光点a3的位置坐标(0,x3,z3);可以计算出激光坐标系{t2}在psd接受装置坐标系{t1}的x轴、y轴、z轴的单位向量:
[0009]10.s5、求得psd接受端坐标系{t1}与激光发射器发射端坐标系{t2}的其次变换矩阵
[0011][0012]
[0013][0014]
式中,表示旋转矩阵,表示位移矩阵;θ表示两坐标系x轴的夹角;ψ表示两坐标系y轴的夹角;φ表示两坐标系z轴的夹角;
[0015]
s6、记录两工业机器人各关节角度,求得工业机器人a的基坐标系{b1}到psd接收装置坐标系{t1}的齐次变换矩阵工业机器人b的基坐标系{b2}到激光发射发射端坐标系{t2}的齐次变换矩阵在根据已经求得的psd接受端坐标系{t1}与激光发射器发射端坐标系{t2}的其次变换矩阵从而获得工业机器人a的基坐标系{b1}与工业机器人b的基坐标系{b2}的坐标关系
[0016]
s7、在不同空间点处重复上述六个步骤,完成协作机器人基坐标系的标定。
[0017]
一种基于psd传感器的协作机器人标定方法采取以下装置,包括:psd接收装置(3)、激光发射器(4)、psd传感器(31)、接收端工装底座(32)、三束激光发射器(41)、激光工装底座(42)、psd感光面(311)、蓝牙信号发射端(312);所述接受端工装底座(32)通过锁紧装置平行安装与机器人a末端法兰(2)。激光发射器(4)发射出的三束激光可以通过psd感光面(311)接收。
[0018]
所述psd信号接收装置(3),由三个psd传感器(31)安装在接收端工装底座(42)上,接收端工装底座(42)三个工装面相互正交,psd感光面(311)与接收端工装底座(42)平行。三个psd感光面(311)相互正交形成三维坐标系。蓝牙信号发射端(312)将三个psd感光面(311)接受到的位置信息传输到电脑端。
[0019]
本发明可以通过在另外机器人末端加装psd信号接收器或激光发射器实现多台协作机器人的基坐标标定。
附图说明
[0020]
图1为本发明实施例中协作机器人基坐标标定系统整体结构示意图。
[0021]
图2为本发明实施例中标定测量装置的结构图。
[0022]
图3为本发明实施例中psd信号接收装置的结构图。
[0023]
图中:1、工业机器人a;2、工业机器人a末端法兰3、psd信号接收器;4、激光发射器;5、工业机器人b末端法兰;6、工业机器人b;31、psd传感器;32、接收端工装底座;41、三束激光发射器;42、激光工装底座;311、psd感光面;312、蓝牙信号发射端;
具体实施方式
[0024]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0025]
本发明提出了一种基于psd传感器的协作机器人基坐标标定方法;
[0026]
本发明的实施例中;所述的协作机器人标定系统包括:两台编号为a、b的工业机器人,以及测量使用的psd信号接受装置与一个三束激光发射的发射装置。两装置安装在各自工业机器人的末端法兰盘上,标定系统以及测量工具的安装图如图1所示;测量装置的结构图如图2、图3所示;
[0027]
本发明中需要用到四个位置的坐标系:工业机器人a的基坐标系{b1};工业机器人b的基坐标系{b2};psd接收装置坐标系{t1};激光发射发射端坐标系{t2};
[0028]
首先将激光发射器与psd接收装置各自安装在工业机器人a、b的末端法兰盘上;
[0029]
建立工业机器人a与工业机器人b基坐标系齐次变矩阵,确定机器人a与机器人的空间约束关系;
[0030]
根据第一步建立的空间约束关系,操作两机器人进行对接,保证激光发射器发出的三束正交激光可以打到psd接受装置的psd感光面上;
[0031]
通过psd蓝牙接口发出的信号采集,得到三束激光在psd传感器上激光点的位置信息。
[0032]
在psd接收装置(3)坐标系x_o_y面激光点a1的位置坐标(x1,y1,0);在psd接收装置坐标系x_o_z面激光点a2的位置坐标(x2,0,z2);在psd接收装置坐标系y_o_z面激光点a3的位置坐标(0,x3,z3);
[0033]
通过相互正交的向量构建方程,求解激光器坐标原点o4在psd接收装置坐标系下的坐位置(a,b,c);
[0034][0035]
计算出激光坐标系{t2}在psd接受装置坐标系{t1}的x轴、y轴、z轴的单位向量
[0036]
求得psd接受端坐标系{t1}与激光发射器发射端坐标系{t2}的其次变换矩阵
[0037]
记录两工业机器人各关节角度,以及d-h参数;
[0038]
求得工业机器人a的基坐标系{b1}到psd接收装置坐标系{t1}的齐次变换矩阵
[0039]
求得工业机器人b的基坐标系{b2}到激光发射发射端坐标系{t2}的齐次变换矩阵
[0040]
根据已经求得的psd接受端坐标系{t1}与激光发射器发射端坐标系{t2}的其次变换矩阵从而获得工业机器人a的基坐标系{b1}与工业机器人b的基坐标系{b2}的坐标关系
[0041]
选择不同空间点,重复上述步骤,完成协作机器人基坐标系的标定。
[0042]
以上所述仅为本发明的最有效实施方案,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明工作原理的前提下,还可以做出适当的改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1