一种建筑施工机器人的制作方法
本技术涉及建筑施工设备领域,具体而言,涉及一种建筑施工机器人。
背景技术:
1、锁扣地板因为在安装过程中不需要使用粘合剂,安全环保,铺装简便,所以在家装领域被大量使用。目前,建筑室内的地板通常采用人工进行安装,然而这种施工方式导致地板的安装效率较低,且工作劳动强度大。因此,为了提高地板的铺设效率和节省人工成本,实现地板的自动化安装,现在通常采用自动化的地板安装机器人对地板进行安装。
2、请参阅申请号为cn202010144384.x的中国专利,为了实现上料自动化,底盘上专门预留出空间形成料箱以放置待铺贴的木地板,机械手自动拾取木地板且将其铺贴至地板,从而实现了地板安装的上料、拾取和铺贴流程的自动化。
3、但是,在底盘的尺寸有限的前提下,料箱通常在底盘上占据较大的空间,会排挤其他部件的安装空间,将会导致其他部件的安装成为一个难题。
4、因此,请参阅另一件申请号为cn201911348271.5的中国专利,其申请文件中的储料机构4相当于料箱,其不设置在底盘上,而是设置于安装臂上,从而减小机器人的占地面积。
5、但是,料箱设置在安装臂上,当将木地板放置于料箱内时,安装臂所承载的重量就会增加,那么在规划安装臂的位姿时就会增加设计难度。
6、因此,有必要设计一种新的方案,以克服上述问题。
技术实现思路
1、本技术实施例提供一种建筑施工机器人,以改善现有的地板安装机器人的料箱占地空间较大,不利于小型化的问题。
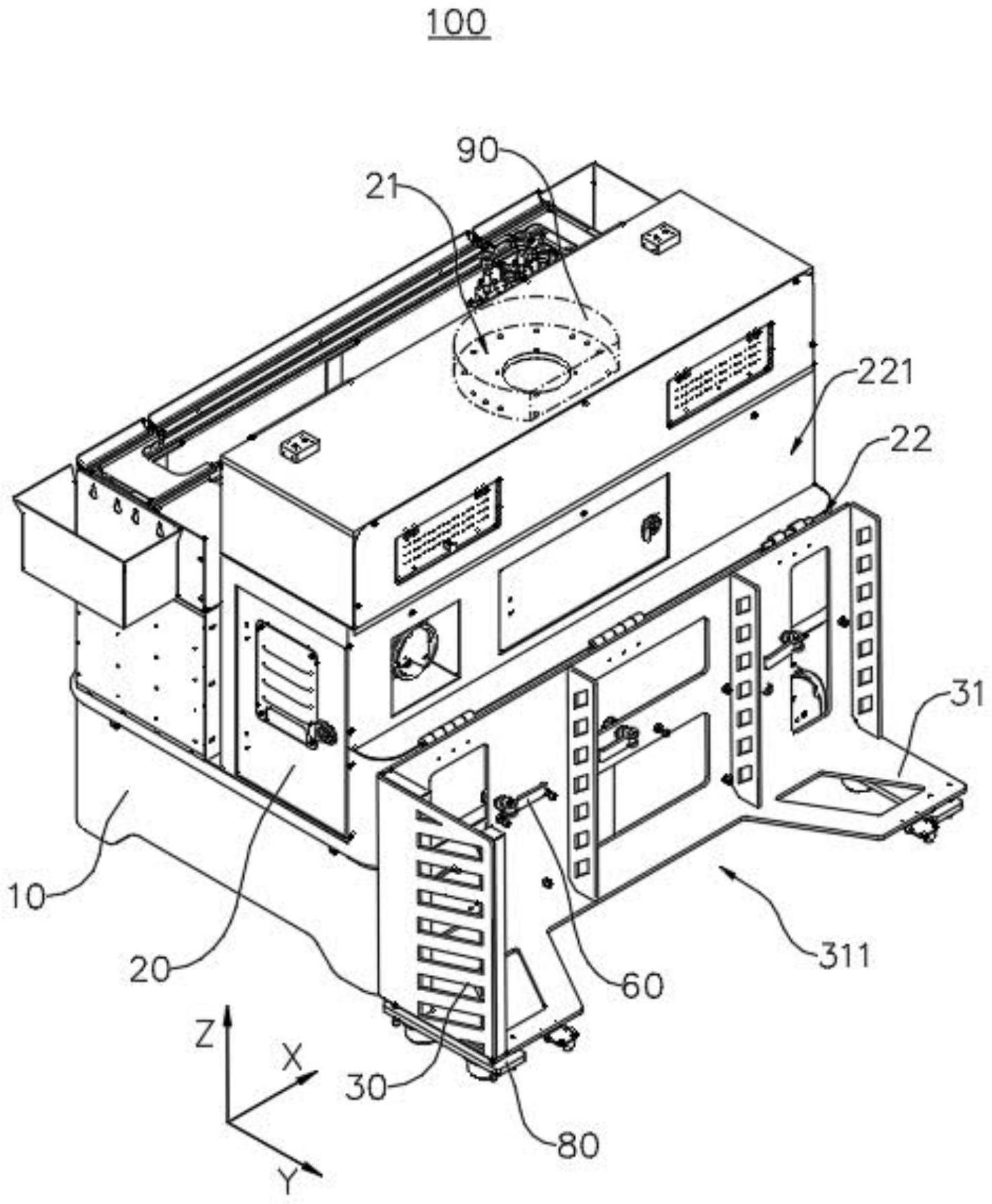
2、第一方面,本技术实施例提供一种建筑施工机器人,用于安装板材,所述建筑施工机器人包括移动底盘、控制柜和料箱;所述控制柜安装于所述移动底盘上;所述料箱绕沿前后方向布置的轴线可翻转地连接于所述控制柜在左右方向上的一侧,所述料箱用于存放所述板材,所述料箱具有底壁;其中,所述料箱具有工作位置和收纳位置,当所述料箱相对所述控制柜翻转至所述工作位置时,所述料箱位于所述移动底盘在所述左右方向上的一侧,且所述底壁用于放置所述板材;当所述料箱相对所述控制柜翻转至所述收纳位置时,所述底壁覆盖于所述控制柜的顶部。
3、在上述技术方案中,建筑施工机器人具有用于存放板材的料箱,以通过料箱对板材进行存放能够对板材起到缓存的作用,从而便于建筑施工机器人在进行板材安装时对取用料箱内的板材。通过将料箱绕沿前后方向布置的轴线可翻转地连接在控制柜上,使得料箱具有工作位置和收纳位置,从而当料箱位于工作位置时,料箱位于移动底盘在左右方向上的一侧,使得料箱的底壁能够放置板材,且当料箱位于收纳位置时,料箱的底壁覆盖在控制柜的顶部,以使料箱收容于控制柜上,进而使得建筑施工机器人在料箱位于收容位置时能够缩小料箱与移动底盘的占地宽度。采用这种结构的建筑施工机器人在对板材进行安装前只需将料箱翻转至收纳位置即可有效减小建筑施工机器人的宽度尺寸,以便于建筑施工机器人进入到室内作业,同时由于料箱设置在控制柜上,不占据移动底盘的安装空间,从而不影响其他部件的安装位置,从而解决了料箱排挤其他部件的安装空间的问题,且在建筑施工机器人进入至室内后只需将料箱翻转至工作位置即可通过料箱存放板材,从而无需在建筑施工机器人进入室内前先对料箱拆卸,且在进入室内后再对料箱进行组装,进而能够有效减少建筑施工机器人在进行板材安装作业时的前期准备工作,以缩短建筑施工机器人安装板材的施工周期,有利于提高板材的安装效率。
4、另外,本技术实施例提供的建筑施工机器人还具有如下附加的技术特征:
5、在一些实施例中,所述控制柜在所述左右方向上具有供安装所述料箱的安装侧;所述安装侧上设置有避让槽,当所述料箱位于所述收纳位置时,所述料箱的至少部分容纳于所述避让槽内。
6、在上述技术方案中,通过在控制柜用于安装料箱的安装侧上设置避让槽,以使料箱在翻转至收纳位置时料箱的至少部分能够容纳于安装侧的避让槽内,从而一方面能够有效提高料箱在位于收纳位置时覆盖于控制柜上的结构稳定性,另一方面能够进一步减小位于收纳位置的料箱占用的宽度尺寸。
7、在一些实施例中,当所述料箱位于所述收纳位置时,所述料箱在所述左右方向上的侧边缘不超出所述安装侧。
8、在上述技术方案中,通过将位于收纳位置的料箱设置为料箱在左右方向上的侧边缘不超出控制柜的安装侧,使得建筑施工机器人的宽度尺寸在料箱位于收纳位置时不会受到料箱的影响,从而能够进一步降低料箱对建筑施工机器人的宽度尺寸的影响。
9、在一些实施例中,在所述左右方向上,所述安装侧与所述移动底盘靠近所述料箱的一侧平齐。
10、在上述技术方案中,通过将控制柜的安装侧设置为与所述移动底盘在左右方向上的一侧平齐,以使位于收纳位置的料箱的侧边缘在左右方向上不超出移动底盘,从而使得移动底盘的宽度尺寸即是建筑施工机器人的宽度尺寸,进而有利于建筑施工机器人穿过狭窄的区域。
11、在一些实施例中,所述控制柜的顶部具有用于安装机械臂的安装区域;所述底壁开设有避让缺口,所述避让缺口用于在所述料箱位于所述收纳位置时避让所述安装区域。
12、在上述技术方案中,通过在料箱的底壁上设置用于避让安装机械臂的安装区域的避让缺口,使得料箱在翻转至收纳位置时能够对机械臂进行避让,从而能够保证料箱能够翻转至收纳位置,且使得料箱的底壁能够覆盖于控制柜的顶部。
13、在一些实施例中,所述建筑施工机器人还包括第一锁紧件;所述第一锁紧件用于在所述料箱位于所述收纳位置时可释放地将所述料箱与所述控制柜锁紧,以将所述料箱保持在所述收纳位置。
14、在上述技术方案中,建筑施工机器人还设置有第一锁紧件,通过第一锁紧件能够将位于收纳位置的料箱与控制柜可释放地锁紧,以将料箱保持于收纳位置,也就是说,当第一锁紧件将料箱和控制柜释放时,料箱能够相对控制柜翻转,反之,当第一锁紧件将料箱和控制柜锁紧时,料箱保持于收纳位置,从而通过这种结构能够保证料箱位于收纳位置时的稳定性,以降低料箱在建筑施工机器人移动的过程中出现掉落的风险,进而有利于减少建筑施工机器人存在的安全隐患。
15、在一些实施例中,所述第一锁紧件包括第一卡接部和第二卡接部;所述第一卡接部安装于所述控制柜的顶部,所述第二卡接部安装于所述底壁,所述第一卡接部和所述第二卡接部用于在所述料箱位于所述收纳位置时卡接配合。
16、在上述技术方案中,第一锁紧件设置有第一卡接部和第二卡接部,通过将第一卡接部安装于控制柜的顶部,且将第二卡接部安装料箱的底壁,从而使得料箱在翻转至收纳位置时设置于底壁的第二卡接部能够卡接于设置于控制柜的顶部上的第一卡接部,进而实现料箱与控制柜之间的锁紧,采用这种结构的第一锁紧件操作较为简单,且便于实现。
17、在一些实施例中,所述建筑施工机器人还包括第二锁紧件;所述第二锁紧件用于在所述料箱位于所述工作位置时可释放地将所述料箱与所述控制柜锁紧,以将所述料箱保持在所述工作位置。
18、在上述技术方案中,建筑施工机器人还设置有第二锁紧件,通过第二锁紧件能够将位于工作位置的料箱与控制柜可释放地锁紧,以将料箱保持于工作位置,也就是说,当第二锁紧件将料箱和控制柜释放时,料箱能够相对控制柜翻转,反之,当第二锁紧件将料箱和控制柜锁紧时,料箱保持于工作位置,从而通过这种结构能够保证料箱在位于工作位置时的稳定性,以减少料箱在建筑施工机器人移动的过程中相对控制柜出现晃动的现象,进而有利于料箱对板材进行存放和便于建筑施工机器人进行作业。
19、在一些实施例中,所述控制柜在所述左右方向上连接于所述料箱的一侧开设有连接孔;所述第二锁紧件包括连接部和手持部,所述连接部绕其轴线可转动地设置于所述料箱,所述手持部用于在所述料箱位于所述工作位置时带动所述连接部相对所述料箱转动,以使所述连接部卡于所述连接孔内。
20、在上述技术方案中,第二锁紧件具有连接部和手持部,通过将连接部可转动地设置在料箱上,使得手持部在带动连接部转动时能够卡于控制柜的连接孔内,从而将位于工作位置的料箱与控制柜进行锁紧,结构简单,且便于操作。
21、在一些实施例中,所述建筑施工机器人还包括调节件;所述调节件设置于所述料箱,所述调节件用于调节所述料箱的倾斜角度,以将所述料箱调节至所述工作位置。
22、在上述技术方案中,通过设置在料箱上的调节件能够在料箱相对控制柜翻转后调节料箱的倾斜角度,从而将料箱调节至工作位置,也就是说,调节件能够在料箱相对控制柜从收纳位置向工作位置进行翻转后提高料箱相对控制柜的位置精度,从而使得建筑施工机器人在对板材进行安装时能够准确地从料箱内对板材进行拾取,进而有利于提高建筑施工机器人的作业精度,以保证板材的安装质量。
23、在一些实施例中,所述建筑施工机器人还包括支撑机构;所述支撑机构安装于所述底壁,所述支撑机构用于在所述料箱位于所述工作位置时支撑所述料箱。
24、在上述技术方案中,通过在料箱的底壁安装支撑机构,使得支撑机构在料箱位于工作位置时能够对料箱进行支撑,从而能够降低料箱对移动底盘的负载,进而有利于提高建筑施工机器人的平衡性,以提高建筑施工机器人的作业效果。
25、在一些实施例中,所述支撑机构包括调节组件和行走轮;所述调节组件连接于所述行走轮和所述底壁,所述调节组件用于在所述料箱位于所述工作位置时调节所述行走轮相对所述底壁在上下方向上的位置,所述行走轮用于在所述料箱位于所述工作位置时支撑所述料箱。
26、在上述技术方案中,支撑机构设置有行走轮,通过将行走轮设置于料箱的底壁,使得行走轮在支撑对料箱进行支撑的同时能够跟随移动底盘移动,从而有利于建筑施工机器人对板材进行安装,且能够有效避免支撑机构划伤已铺好的板材。此外,支撑机构还设置有调节组件,通过调节组件能够在料箱位于工作位置时调节行走轮相对底壁在上下方向上的位置,从而能够调节行走轮的高度位置,以使建筑施工机器人能够适用于不同的施工环境,进而有利于提高建筑施工机器人的使用柔性。
27、在一些实施例中,所述料箱还具有第一侧壁;所述第一侧壁连接于所述底壁在所述左右方向上的一端,所述第一侧壁绕沿所述前后方向布置的轴线可翻转地连接于所述控制柜在左右方向上的一侧;当所述料箱相对所述控制柜翻转至所述收纳位置时,所述第一侧壁覆盖于所述控制柜在所述左右方向上的一侧。
28、在上述技术方案中,料箱还具有第一侧壁,通过将底壁与第一侧壁相连,且将第一侧壁可翻转地连接于控制柜上,从而相对控制柜翻转第一侧壁即可带动料箱在工作位置与收纳位置之间切换,结构简单,且稳定性较高。
29、在一些实施例中,所述料箱还具有第二侧壁;所述第二侧壁连接于所述底壁和所述第一侧壁在所述前后方向上的一端,所述底壁、所述第一侧壁和所述第二侧壁围合形成用于存放所述板材的存放空间,所述存放空间在所述前后方向上远离所述第二侧壁的一端开口设置;当所述料箱相对所述控制柜翻转至所述收纳位置时,所述第二侧壁覆盖于所述控制柜在所述前后方向上的一侧。
30、在上述技术方案中,通过在第一侧壁和底壁在前后方向上的一端连接第二侧壁,以使第一侧壁、第二侧壁和底壁围合形成用于存放板材的存放空间,从而使得第二侧壁能够对放置于存放空间内的板材在前后方向上起到一定的定位和限位作用,以便于将板材放置于料箱内,且便于建筑施工机器人在安装板材时从料箱内拾取板材。此外,通过只在第一侧壁和底壁的一端设置第二侧壁,使得底壁、第一侧壁和第二侧壁形成的存放空间在前后方向上远离第二侧壁的一端形成开口,以使料箱能够容纳不同长度的板材。
31、在一些实施例中,所述第一侧壁上设置有供所述板材卡入的限位槽,所述限位槽从所述料箱的顶部向所述底壁延伸。
32、在上述技术方案中,通过在第一侧壁上设置供板材卡入的限位槽,且限位槽的延伸方向为从料箱的底壁向料箱的顶部延伸,从而一方面使得限位槽能够对存放于料箱内的板材起到限位作用,以减少板材在料箱内沿左右方向晃动,另一方面使得限位槽能够对板材起到导向作用,以便于操作人员将板材沿限位槽放入至料箱内。
- 还没有人留言评论。精彩留言会获得点赞!