一种基于双碳量约束转化利用的工业机器人的制作方法
1.本发明涉及机器人技术领域,具体为一种基于双碳量约束转化利用的工业机器人。
背景技术:
2.双碳是碳中和与碳达峰的简称,碳中和是指企业、团体或个人测算在一定时间内直接或间接产生的温室气体排放总量,通过植树造林、节能减排等形式,以抵消自身产生的二氧化碳排放量,实现二氧化碳零排放,而碳达峰是指在某一个时点,二氧化碳的排放不再增长达到峰值,之后逐步回落,通过生产过程中对双碳量的约束,可以极大程度地降低我国碳排放量。
3.工业机器人是工业生产过程中常用的工业设备,而工业机器人的圆形多为电气元件系统进行控制,并且在工作过程中也需要电力进行供能,在长时间的使用过程中,工业机器人上主臂与第一副臂接触面之间的润滑油会逐渐消耗,当润滑油消耗减少时,则需要人工进行检修补油操作,并且在进行补油时,需要对工业机器人进行停机处理,由于工业机器人都是长期持续工作,因此润滑油的消耗速度快,需要频繁补油,而每一次停机补油后的开机过程都会消耗极多的电力,这样就会使得工业机器人在使用过程中会浪费大量的电力资源,并且频繁的人工补油也使得工业机器人在使用时较为麻烦,从而使得工业机器人的使用无法满足双碳理念的要求。
技术实现要素:
4.为解决上述主臂与第一副臂接触面之间润滑油消耗过快需要频繁进行停机补油导致电力损耗严重的问题,实现以上工业机器人在工作运行过程中可以自动对主臂与第一副臂接触面之间的润滑油进行补充的目的,本发明通过以下技术方案予以实现:一种基于双碳量约束转化利用的工业机器人,包括底座、设置在底座顶部的主臂、设置在主臂外部的第一副臂、第二副臂、抓手以及转动轴,所述主臂的内部设置有自动注油机构,所述自动注油机构包括连接轴、绝缘杆、连接环、绝缘件、检测件、注油件,所述转动轴的外部设置有连接轴,所述连接轴的外部设置有绝缘杆,所述主臂的内部设置有连接环,所述连接环的外部设置有绝缘件,所述主臂的内部设置有检测件,所述检测件包括第一触头、第二触头、驱动电机,所述主臂的外部设置有第一触头,所述主臂的内部设置有第二触头,所述主臂的内部设置有驱动电机。
5.所述主臂的内部设置有注油件,所述注油件包括绝缘油箱、齿轮、密封板、齿牙、润滑油、注油管,所述主臂的内部设置有绝缘油箱,所述绝缘油箱的内部设置有密封板,所述密封板的外表面开设有齿牙,所述齿牙的外侧面啮合有齿轮,所述绝缘油箱的内部填充有润滑油,所述绝缘油箱的外部设置有注油管。
6.所述主臂的内部设置有缺油警示机构,所述缺油警示机构包括顶杆、第一弹簧、活动杆、导电块、电源块、密封垫圈、复位件、警示器,所述密封板的内部设置有顶杆,所述顶杆
的外部设置有第一弹簧,所述第一弹簧,所述顶杆的外部设置有活动杆,所述活动杆的外部设置有导电块,所述密封板的内部设置有电源块,所述密封板的内部设置有密封垫圈,所述绝缘油箱的内部设置有复位件,所述主臂的内部设置有警示器。
7.所述复位件包括拉绳、线轮、棘轮、卡杆、控压槽、密封塞、铁块、第二弹簧、电磁铁、扭簧,所述密封板的外部设置有拉绳,所述拉绳的外部设置有线轮,所述线轮的外部设置有棘轮,所述绝缘油箱的内部设置有卡杆,所述绝缘油箱的内侧面开设有控压槽,所述控压槽的内部设置有密封塞,所述密封塞的外部设置有铁块,所述铁块的外部设置有第二弹簧,所述第二弹簧的外部设置有电磁铁,所述棘轮的外部设置有扭簧。
8.进一步的,所述连接轴与转动轴的内侧面转动连接,所述绝缘杆与主臂的内侧面固定连接,所述连接环为金属材料制成,所述绝缘件的数量为两个,两个所述绝缘件分别设置在连接环和主臂之间以及转动轴和第一副臂之间。
9.进一步的,所述第一触头、第二触头以及驱动电机串联在同一电路,所述第一触头与连接轴接触连接,所述第二触头与连接环接触连接。
10.进一步的,所述密封板与绝缘油箱的内侧面滑动连接且规格与绝缘油箱相对应,所述驱动电机设置在绝缘油箱的内部,所述齿轮与驱动电机传动连接,所述注油管的位置、规格均与转动轴以及连接环相对应。
11.进一步的,所述顶杆与密封板的内侧面滑动连接,所述密封垫圈的位置、规格均与顶杆相对应,所述第一弹簧与密封板的内侧面固定连接,所述活动杆与密封板的内侧面滑动连接,所述导电块的位置、规格均与电源块相对应。
12.进一步的,所述线轮与绝缘油箱的内侧面转动连接,所述拉绳被收卷在线轮的外表面,所述卡杆与控压槽的内侧面滑动连接且规格与控压槽相对应,所述扭簧与绝缘油箱的内侧面固定连接。
13.进一步的,所述密封塞与控压槽的内侧面滑动连接,所述电磁铁与控压槽的内侧面固定连接,所述铁块的位置、规格均与电磁铁相对应。
14.进一步的,所述警示器以及电磁铁均与导电块耦合。
15.本发明提供了一种基于双碳量约束转化利用的工业机器人。具备以下有益效果:
16.1、该基于双碳量约束转化利用的工业机器人,通过第一触头、第二触头、转动轴、连接环以及补油件之间的相互配合,可以在工业机器人工作过程中对主臂与第一副臂接触面之间的润滑油状态进行实时监测并在润滑油消耗较多时自动进行补油操作,避免了工业机器人在工作过程中需要频繁停机进行补油导致电量损耗严重且使得工业机器人在使用过程中存在着一定局限性的情况发生,同时也避免了工业机器人在使用过程中主臂与第一副臂接触面之间摩擦阻力增大导致电力损耗严重的情况发生。
17.2、该基于双碳量约束转化利用的工业机器人,通过顶杆、第一弹簧、导电块、电源块、警示器以及复位件之间的相互配合,可以在绝缘油箱内部储油量见底时对操作者进行警示提醒,并且可以自动带动密封板复位,从而可以使得操作者及时对绝缘油箱进行补油且密封板的自动复位可以方便操作者进行补油,从而可以使得主臂与第一副臂接触面之间的润滑油可以持续补充保持充足状态。
附图说明
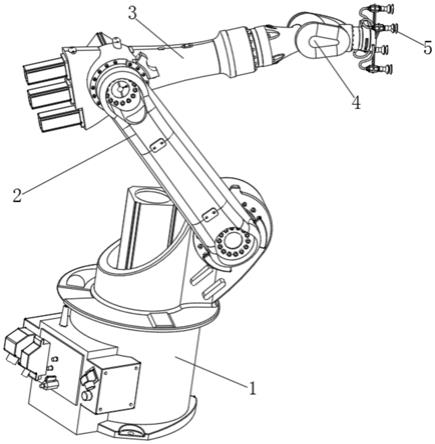
18.图1为本发明立体结构示意图;
19.图2为本发明局部剖视结构示意图;
20.图3为本发明图1中部分结构连接关系结构示意图;
21.图4为本发明图3中a处放大结构示意图;
22.图5为本发明图3中b处放大结构示意图;
23.图6为本发明图3中c处放大结构示意图;
24.图7为本发明图3中d处放大结构示意图;
25.图8为本发明自动注油机构工作流程图;
26.图9为本发明缺油警示机构工作流程图。
27.图中:1、底座;2、主臂;3、第一副臂;4、第二副臂;5、抓手;6、转动轴;7、自动注油机构;71、连接轴;72、绝缘杆;73、连接环;74、绝缘件;75、检测件;751、第一触头;752、第二触头;753、驱动电机;76、注油件;761、绝缘油箱;762、齿轮;763、密封板;764、齿牙;765、润滑油;766、注油管;8、缺油警示机构;81、顶杆;82、第一弹簧;83、活动杆;84、导电块;85、电源块;86、密封垫圈;87、复位件;871、拉绳;872、线轮;873、棘轮;874、卡杆;875、控压槽;876、密封塞;877、铁块;878、第二弹簧;879、电磁铁;8710、扭簧;88、警示器。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.该基于双碳量约束转化利用的工业机器人的实施例如下:
30.请参阅图1-图9,一种基于双碳量约束转化利用的工业机器人,包括底座1、设置在底座1顶部的主臂2、设置在主臂2外部的第一副臂3、第二副臂4、抓手5以及转动轴6,主臂2的内部设置有自动注油机构7,自动注油机构7包括连接轴71、绝缘杆72、连接环73、绝缘件74、检测件75、注油件76,转动轴6的外部设置有连接轴71,连接轴71的外部设置有绝缘杆72,主臂2的内部设置有连接环73,连接环73的外部设置有绝缘件74,主臂2 的内部设置有检测件75,主臂2的内部设置有注油件76;
31.检测件75包括第一触头751、第二触头752、驱动电机753,主臂2的外部设置有第一触头751,主臂2的内部设置有第二触头752,主臂2的内部设置有驱动电机753,第一触头751、第二触头752以及驱动电机753串联在同一电路,第一触头751与连接轴71接触连接,第二触头752与连接环73接触连接,正常状态下的润滑油765为不良导体,因此转动轴6与连接环73的接触摩擦面被油隔开,阻抗较大,当润滑油765状态不良时,金属表面直接接触,随着直接接触面面积的增大,阻抗逐渐变小,串联电路阻值越来越小,而当润滑油765状态较好时,由于阻抗较大,因此串联短路中的阻值较大,从而可以依此对润滑油765的状态进行实时监测,同时,当转动轴6与连接环73接触面之间的润滑油765量过少时,串联电路中阻值减少,此时电路中通过的电流满足驱动电机753转动的需要。
32.注油件76包括绝缘油箱761、齿轮762、密封板763、齿牙764、润滑油 765、注油管
766,主臂2的内部设置有绝缘油箱761,绝缘油箱761的内部设置有密封板763,密封板763的外表面开设有齿牙764,齿牙764的外侧面啮合有齿轮762,绝缘油箱761的内部填充有润滑油765,绝缘油箱761的外部设置有注油管766,连接轴71与转动轴6的内侧面转动连接,绝缘杆72与主臂2的内侧面固定连接,连接环73为金属材料制成,绝缘件74的数量为两个,两个绝缘件74分别设置在连接环73和主臂2之间以及转动轴6和第一副臂3之间,可以将连接轴71与第一副臂3之间绝缘隔开以及将连接环73 与主臂2之间绝缘隔开,从而可以更为精确地对转动轴6与连接环73之间的润滑油765状态进行检测。
33.密封板763与绝缘油箱761的内侧面滑动连接且规格与绝缘油箱761相对应,驱动电机753设置在绝缘油箱761的内部,齿轮762与驱动电机753 传动连接,注油管766的位置、规格均与转动轴6以及连接环73相对应,使得注油管766内部输出的润滑油765可以注入至转动轴6与连接环73的接触缝隙内部。
34.主臂2的内部设置有缺油警示机构8,缺油警示机构8包括顶杆81、第一弹簧82、活动杆83、导电块84、电源块85、密封垫圈86、复位件87、警示器88,密封板763的内部设置有顶杆81,顶杆81的外部设置有第一弹簧 82,第一弹簧82,顶杆81的外部设置有活动杆83,活动杆83的外部设置有导电块84,密封板763的内部设置有电源块85,顶杆81与密封板763的内侧面滑动连接,密封垫圈86的位置、规格均与顶杆81相对应,第一弹簧82 与密封板763的内侧面固定连接,活动杆83与密封板763的内侧面滑动连接,导电块84的位置、规格均与电源块85相对应。
35.密封板763的内部设置有密封垫圈86,绝缘油箱761的内部设置有复位件87,主臂2的内部设置有警示器88,警示器88以及电磁铁879均与导电块84耦合,使得导电块84与电源块85接触时会使得警示器88以及电磁铁 879均通电。
36.复位件87包括拉绳871、线轮872、棘轮873、卡杆874、控压槽875、密封塞876、铁块877、第二弹簧878、电磁铁879、扭簧8710,密封板763 的外部设置有拉绳871,拉绳871的外部设置有线轮872,线轮872的外部设置有棘轮873,在卡杆874的配合作用下是,棘轮873只能够进行单向转动,且棘轮873的允许单向转动方向与齿轮762转动带动密封板763移动对润滑油765进行挤压时的方向一致,绝缘油箱761的内部设置有卡杆874,绝缘油箱761的内侧面开设有控压槽875,控压槽875的内部设置有密封塞876,密封塞876的外部设置有铁块877,铁块877的外部设置有第二弹簧878,第二弹簧878的外部设置有电磁铁879,密封塞876与控压槽875的内侧面滑动连接,电磁铁879与控压槽875的内侧面固定连接,铁块877的位置、规格均与电磁铁879相对应。
37.棘轮873的外部设置有扭簧8710,线轮872与绝缘油箱761的内侧面转动连接,拉绳871被收卷在线轮872的外表面,卡杆874与控压槽875的内侧面滑动连接且规格与控压槽875相对应,扭簧8710与绝缘油箱761的内侧面固定连接。
38.工作原理:在工作时,通过第一副臂3与主臂2之间发生相对转动来实现工业机器人多自由度工作,长时间的转动会使得第一副臂3与主臂2连接面之间的润滑油765消耗严重,而润滑油765缺乏会使得第一副臂3与主臂2 之间发生转动时的摩擦阻力增大,从而不仅会使得两者的接触面摩擦受损,同时还会造成动能损耗变大,使得电力资源浪费,因此在实际工作过程中,当转动轴6与连接环73接触面之间的润滑油765量消耗减少时,转动轴6与连接环73接触面之间的阻抗减小,串联电路中的阻值减小,从而电路中的电流增大至满足
驱动电机753正常运行,驱动电机753运行过程中会驱动齿轮 762转动,在齿牙764的传动作用下,齿轮762转动带动密封板763移动,密封板763移动过程中会对润滑油765进行挤压,使得润滑油765被挤压至注油管766内部并从注油管766端头部位排出至转动轴6与连接环73之间,从而可以在工业机器人运行工作过程中自动进行注油操作,避免了主臂2与第一副臂3之间连接部位的润滑油765消耗需要人工频繁对其进行补充导致其在实际使用过程中存在着一定局限性的情况发生;
39.密封板763移动过程中还会对拉绳871进行拉扯,拉绳871受到拉扯时会带动线轮872转动,线轮872转动带动棘轮873转动,棘轮873转动带动扭簧8710扭转压缩,当密封板763移动至顶杆81与绝缘油箱761内壁接触时,顶杆81不再移动,此时密封板763继续移动会与顶杆81之间发生相对运动,从而会对第一弹簧82进行压缩,同时还会使得活动杆83与密封板763 之间发生相对运动,使得导电块84移动靠近电源块85,当导电块84移动至与电源块85接触时,导电块84通电并依次间隔给警示器88以及电磁铁879 进行通电,警示器88通电后会发出警示音对操作者进行提醒,使得操作者可以及时对绝缘油箱761内部的润滑油765进行补充,从而使得转动轴6与连接环73之前的润滑油765可以持续进行自动补充,避免了绝缘油箱761内部缺油导致润滑油765无法及时补充的情况发生,使得工业机器人使用过程中的人工补油时间间隔显著延长;
40.电磁铁879通电后会产生磁性与铁块877之间相互吸引,使得铁块877 移动对第二弹簧878进行压缩,同时带动密封塞876移动,密封塞876移动过程中会使得控压槽875内部产生负压并在其另一端产生吸力,使得卡杆874 移动至控压槽875的内部并与棘轮873分离,从而使得棘轮873的反向转动不再受限,此时在扭簧8710回弹力的作用下,棘轮873反向转动带动线轮872 反向转动对拉绳871进行收卷,从而使得密封板763反向移动复位,这样就可以方便操作者进行补油操作。
41.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1