物流机器人的货仓稳定装置及其控制方法与流程
1.本发明属于物流机器人领域,尤其涉及一种物流机器人的货仓稳定装置及其控制方法。
背景技术:
2.随着电子商务的日益发展,与之配套的物流产业也在不断发展创新,物流效率一直是各个电商巨头的痛点。为了提高仓库运营效率,降低物流成本,电商巨头们纷纷研发物流配送机器人,助推企业仓储物流系统升级优化。
3.现有物流机器人包括货仓和行走机构,通过行走机构将装配于行走机构上的货仓带动在配送区域内移动,但是大多数的时候行走机构在平稳的道路上移动,一般通过倾斜路面时,行走机构和货仓为同时倾斜,易导致货仓内货物随货仓的倾斜而倾斜,导致货物损坏或脱离货仓。
技术实现要素:
4.本发明的目的在于提供一种物流机器人的货仓稳定装置,旨在解决现有技术货仓与行走机构同时倾斜的技术问题。
5.本发明是这样实现的:
6.一种物流机器人的货仓稳定装置,包括行走机构和设于所述行走机构上的货仓,所述行走机构上设有支撑件,所述支撑件与所述货仓连接,所述行走机构和所述货仓之间还设置有弹性件;
7.所述货仓内设有用于驱使所述货仓始终处于水平位置的平衡机构,所述平衡机构包括与所述货仓固定连接的平衡杆、固设于所述平衡杆一端的配重块和活动设于所述平衡杆另一端的水平滑移组件,所述水平滑移组件用于使所述平衡杆始终处于水平位置;
8.所述支撑件的一端固定连接于所述平衡杆的中心位置,另一端转动连接于所述行走机构,以使所述水平滑移组件能够根据所述货仓的倾斜程度而滑移至使所述平衡杆保持水平平衡的位置。
9.进一步地,所述支撑件远离所述平衡杆的一端设有转动杆,所述行走机构内设有与所述转动杆间歇性连接的转动环,所述转动杆穿设于所述转动环内。
10.进一步地,所述转动环为环形外齿环,所述行走机构内设有与所述转动环啮合的驱动齿轮和驱动所述驱动齿轮转动的驱动器;所述驱动齿轮和所述转动环位于所述支撑件远离所述平衡杆的一端上。
11.进一步地,所述转动杆内设置有电磁件,所述转动环内设置有磁性件,当所述电磁件通电后,所述转动杆和所述转动环吸附固定。
12.进一步地,所述平衡杆上开设有供所述水平滑移组件滑移的滑槽,所述滑槽的延伸方向与所述平衡杆的延伸方向一致。
13.进一步地,所述平衡杆内设有往复丝杆,所述往复丝杆、所述滑槽、所述平衡杆的
延伸方向一致,且所述往复丝杆的局部位于所述滑槽内,所述配重块内设有驱动所述往复丝杆转动的驱动电机,所述转动后的往复丝杆能够驱动所述水平滑移组件沿所述滑槽往复滑移。
14.进一步地,所述水平滑移组件包括滑移于所述滑槽内的滑动杆,和连接于所述滑动杆上的滑动块所述滑动块用于调节所述平衡杆的水平位置;所述往复丝杆穿过所述滑动杆,并能够驱动所述滑动杆沿所述滑槽往复滑移;所述滑动杆与所述滑槽的上、下壁分别对应设置有第一平面和第二平面;所述第一平面和所述第二平面均凹设有多个滚珠。
15.进一步地,所述滑动杆内设有用于监测所述滑动杆的平衡状态的水平感应传感器。
16.进一步地,所述行走机构内设有控制模块,所述控制模块、所述水平感应传感器、所述驱动器和所述电磁件电性连接。
17.一种控制方法,应用于上述的物流机器人的货仓稳定装置,
18.当所述平衡杆倾斜时,所述水平感应传感器检测到所述平衡杆倾斜的倾斜信号,并将所述倾斜信号发出;
19.所述控制模块接收所述倾斜信号,并根据所述倾斜信号控制所述驱动电机转动而驱动所述往复丝杆转动,所述往复丝杠转动后驱使所述滑动块滑移至与所述配重块相适配的位置,以使所述平衡杆保持水平状态;
20.当所述平衡杆处于水平状态时,所述控制模块控制所述电磁件通电,使所述转动杆与所述转动环磁吸固定,所述驱动齿轮啮合于所述转动环而保持所述平衡杆的水平状态。
21.本发明的有益效果在于:通过活动于平衡杆上的水平滑移组件与配重块的适配,使得平衡杆处于水平状态上,当平衡杆倾斜时,通过调整水平滑移组件在平衡杆上的具体位置,实现调整平衡杆的水平位置,进而调整与平衡杆固定连接的货仓的水平位置;并通过转动连接于行走机构上的支撑件,以便于与支撑件连接的平衡杆能够相对行走机构转动,进而实现调整与平衡杆连接的货仓的水平位置,以实现当行走机构行走的倾斜的路面时货仓能够保持在水平位置上。
附图说明
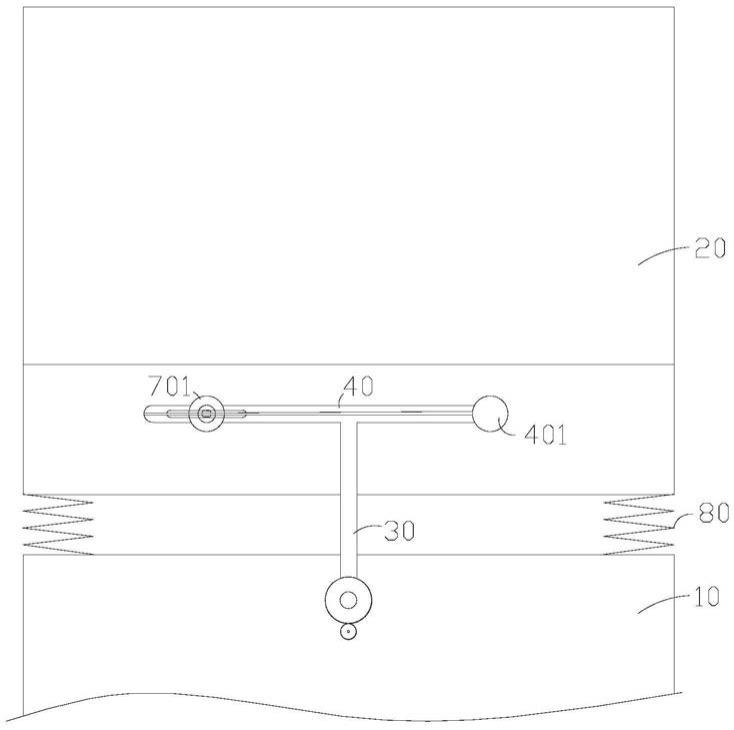
22.图1是本发明实施例提供的物流机器人的货仓稳定装置的示意图;
23.图2是本发明实施例提供的物流机器人的货仓稳定装置中平衡杆与支撑件的组装示意图;
24.图3是图2中的a处放大图。
25.附图标记:
26.10、行走机构;20、货仓;30、支撑件;40、平衡杆;401、配重块;402、滑槽;403、往复丝杆;50、转动杆;501、转动环;60、驱动齿轮;601、驱动器;70、滑动杆;701、滑动块;702、第一平面;703、第二平面;704、滚珠;80、弹簧。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对
本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
28.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为“连接于”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
29.还需要说明的是,本实施例中的左、右、上、下等方位用语,仅是互为相对概念或是以产品的正常使用状态为参考的,而不应该认为是具有限制性的。
30.如图1至图3所示,为本发明实施例提供的一种物流机器人的货仓稳定装置,包括行走机构10和设于所述行走机构10上的货仓20,所述行走机构10上设有与所述货仓20连接的支撑件30;其中,行走机构10和货仓20之间还设置有两个对称设置的弹簧80,且支撑件30位于两个弹簧80之间,以提升行走机构10与货仓20之间的稳定性;所述货仓20内设有用于驱使所述货仓20始终处于水平位置上的平衡机构(图中未标记),所述平衡机构包括与所述货仓20固定连接的平衡杆40、固设于所述平衡杆40的一端的配重块401,和活动于所述平衡杆40另一端的水平滑移组件(图中未标记),所述水平滑移组件用于使所述平衡杆40始终处于水平位置上;通过活动于平衡杆40上的水平滑移组件与配重块401的适配,使得平衡杆40处于水平状态上,当平衡杆40倾斜时,通过调整水平滑移组件在平衡杆40上的具体位置,实现调整平衡杆40的水平位置,进而调整与平衡杆40固定连接的货仓20的水平位置。
31.所述支撑件30的一端固定连接于所述平衡杆40的中心位置上,另一端转动连接于所述行走机构10上,以使所述水平滑移组件能够根据所述货仓20的倾斜程度而滑移至使所述平衡杆40保持水平平衡的位置。即,水平滑移组件在平衡杆40上的位置与配重块401在平衡杆40上的位置适配时,平衡杆40则处于水平状态。通过转动连接于行走机构10上的支撑件30,以便于与支撑件30连接的平衡杆40能够相对行走机构10转动,进而实现调整与平衡杆40连接的货仓20的水平位置,以实现当行走机构10行走的倾斜的路面时货仓20能够保持在水平位置上。
32.参见图1和图2,所述支撑件30远离所述平衡杆40的一端设有转动杆50,所述行走机构10内设有与所述转动杆50间歇性连接的转动环501,所述转动杆50穿设于所述转动环501内,通过转动杆50转动于转动环501内,以便于支撑件30相对行走机构10转动,进而便于货仓20相对行走机构10转动,其中,通过转动杆50与转动环501的间歇性连接,以实现当支撑件30随平衡杆40因倾斜转动时转动杆50转动于转动环501内。
33.具体地,转动杆50与支撑件30垂直设置;所述转动环501为环形外齿环,所述行走机构10内设有与所述转动环501啮合的驱动齿轮60,和驱动所述驱动齿轮60转动的驱动器601;通过转动环501与转动杆50的间歇性连接,以当通过驱动器601转动驱动齿轮60时,转动环501与转动杆50固定连接,以便于通过驱动器601驱动支撑件30摆动,进而实现调节货仓20水平位置的目的。其中,所述驱动齿轮60和所述转动环501位于所述支撑件30远离所述平衡杆的一端上。所述转动杆50内设置有电磁件(图中未展示),所述转动环501内设有磁性件,当所述转动杆50内的电磁件通电后,所述转动杆50和所述转动环501吸附固定,通过在转动杆50和转动环501内设置使两者能够间歇性连接的电磁件和磁性件,以实现当支撑件30随货仓20因倾斜而倾斜时而转动,当支撑件30辅助水平滑移组件进行水平调节时而使电磁件与磁性件磁吸固定,以实现支撑件30通过转动环501与驱动齿轮60的啮合而驱动支撑
件30进行转动补偿。
34.参见图1和图2,所述平衡杆40上开设有供所述水平滑移组件滑移的滑槽402,所述滑槽402的延伸方向与所述平衡杆40的延伸方向一致。通过将滑槽402的延伸方向与平衡杆40的延伸方向设置为一致方向,以便于平衡杆40倾斜时位于滑槽402内的水平滑移组件能够更快捷的在滑槽402内滑移。
35.所述平衡杆40内设有往复丝杆403,所述往复丝杆403、所述滑槽402、所述平衡杆40的延伸方向一致,且所述往复丝杆403的局部位于所述滑槽402内,所述配重块401内设有驱动所述往复丝杆403转动的驱动电机(图中未展示),转动后的所述往复丝杆403能够驱动所述水平滑移组件沿所述滑槽402往复滑移。以通过与滑槽402的延伸方向一致设置的往复丝杆403,驱使水平滑移组件在滑槽402内滑移,进而实现通过调节水平滑移组件在滑槽402内的位置而适配配重块401,使平衡杆40能够快速趋于水平位置上。其中,往复丝杆403位于平衡杆40内。
36.参见图2和图3,所述水平滑移组件包括滑移于所述滑槽402内的滑动杆70,和连接于所述滑动杆70上的滑动块701,以调节所述滑动块701的位置与所述配重块401的位置适配,而实现调节所述平衡杆40的水平位置;所述丝杆403穿过所述滑动杆70,并能够驱动所述滑动杆70沿所述滑槽402往复滑移;通过往复丝杆403驱动所述滑动杆70在滑槽402内往复滑移,以使得通过往复丝杆403调节滑动杆70在滑槽402内的滑移位置,并通过往复丝杆403与滑动杆70的螺接特性,使得滑动杆70在确定位置后,难以移动,进而确保了水平滑移组件与配重块401之间的稳定性;所述滑动杆70与所述滑槽402的上、下壁分别对应设置有第一平面702和第二平面703;所述第一平面702和所述第二平面703均凹设有多个滚珠704,通过在第一平面702和第二平面703上设置多个滚珠704,以使得滑动杆70通过滚珠704滑移于滑槽402内,进一步的提升滑动杆70在滑槽402内滑移的流畅性。
37.所述滑动杆70内设有用于监测滑动杆70的平衡状态的水平感应传感器(图中未展示),以通过水平感应传感器监测平衡杆40是否倾斜的目的,将水平感应传感器设置在滑动杆70内的目的在于,以便于快速感应滑动杆70的水平状态,进而实现快速感应平衡杆40的水平状态。
38.所述行走机构10内设有控制模块,所述控制模块、所述水平感应传感器、所述驱动器601和所述电磁件电性连接。
39.一种控制方法,应用于上述物流机器人的货仓稳定装置,
40.当所述平衡杆40倾斜时,所述水平感应传感器检测到所述平衡杆40倾斜的倾斜信号,并将所述倾斜信号发出;
41.所述控制模块接收到所述倾斜信号,并根据所述倾斜信号控制所述驱动电机转动而驱使所述往复丝杆403转动,所述往复丝杆403转动后驱使所述滑动块701滑移至与所述配重块401的相适配的位置,以使所述平衡杆40保持水平状态;
42.当所述平衡杆40处于水平状态时,所述控制模块控制所述转动杆50内的电磁件通电,使所述转动杆50与所述转动环501磁吸固定,所述驱动齿轮60啮合于所述转动环501而保持所述平衡杆40的水平状态。
43.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1