一种工业机器人防碰撞控制系统的制作方法
1.本实用新型涉及工业机器人防碰撞技术领域,特别是涉及一种工业机器人防碰撞控制系统。
背景技术:
2.人机协作式工业机器人正广泛应用于工业自动化装配中,防碰撞控制成为其安全应用的重要前提。目前工业机器人自带的碰撞检测功能,主要根据碰撞时负载变大,导致其驱动电流增大来检测碰撞发生并做出控制决策,这种方式在机械手臂各关节加减速时,容易产生碰撞误判断,即:设置碰撞参数敏感度值过低,容易因内部阻力而误触发;设置碰撞参数敏感度值过高,容易因钝感而无法正确触发。在当前一些协作式工业机器人中,采用力传感器的方式进行碰撞检测,存在成本高、占用结构空间体积、额外引入较大重量等问题,且其主要检测工业机器人末端、无法实现工业机器人全方位的碰撞检测与控制保护。
技术实现要素:
3.本实用新型所要解决的技术问题是目前自带碰撞检测功能的工业机器人或者在工业机器人末端配置力传感器的工业机器人,在检测到碰撞时,往往已经对工件、操作者或者工业机器人本身产生了碰撞伤害,难以在接触时即刻终止工业机器人运动,从而避免碰撞伤害,同时也无法做到对工业机器人进行全方位的碰撞检测与控制保护。本实用新型提供一种工业机器人防碰撞控制系统,基于电流回路通断式,实时检测工业机器人本体与人体或工件的接触,从而形成弱电流回路,电流传播时间段,可以即刻触发控制信号,在双方接触时即刻控制工业机器人停止运动,避免碰撞伤害,解除安全隐患,实现对工业机器人全方位的碰撞检测和控制保护。
4.本实用新型通过下述技术方案实现:
5.一种工业机器人防碰撞控制系统,包括系统控制器、机器人控制器、继电器、直流电源、第一航插和第二航插;
6.其中,所述系统控制器中设置有电源端子和第二输入信号端;所述电源端子和所述第二输入信号端分别连接在所述继电器的两端,所述继电器连接在所述直流电源的正极,所述直流电源的负极接地。
7.具体地,当保护对象与工业机器人接触时,继电器闭合,第二输入信号端输入高电平信号,系统控制器基于高电平信号向机器人控制器发送暂停运动控制命令,机器人控制器控制工业机器人停止运动。
8.进一步地,所述工业机器人防碰撞控制系统还包括按键;其中,所述按键的两端分别连接所述电源端子和所述第一输入信号端;
9.操作者控制按键是否导通,所述系统控制器通过所述第一输入信号端实时检测所述按键是否导通。
10.具体地,当按键导通,则系统控制器实时检测第一输入信号端输入的信号,当第一
输入信号端输入的信号为上升沿信号,系统控制器向机器人控制器发送暂停运动控制命令,机器人控制器控制工业机器人停止运动;
11.当按键断开,则系统控制器实时检测第一输入信号端和第二输入信号端的信号状态;当工业机器人与操作者或保护对象接触时,则继电器闭合,第二输入信号端输入高电平信号,系统控制器基于高电平信号向机器人控制器发送暂停运动控制命令,机器人控制器控制工业机器人停止运动。
12.进一步地,所述工业机器人防碰撞控制系统还包括第一航插和第二航插;
13.所述第一航插连接在所述直流电源的负极并接地,所述第二航插连接在所述继电器的一端;所述操作者通过第一航插和第二航插控制按键。
14.进一步地,所述继电器包括常开触点对和线圈;其中,所述电源端子和所述第二输入信号端分别连接在所述继电器的常开触点对上;所述继电器的线圈连接在所述直流电源的正极。当操作者或保护对象与工业机器人接触时,继电器的常开触点对和线圈均闭合。
15.进一步地,所述工业机器人防碰撞控制系统中还包括指示灯,所述指示灯并联在所述继电器线圈的两端。当所述保护对象与所述工业机器人接触时,所述指示灯亮;当所述保护对象与所述工业机器人没有接触时,所述指示灯熄灭。
16.进一步地,所述系统控制器和所述机器人控制器可通过无线方式或有线方式连接。
17.进一步地,所述工业机器人的外壳、所述操作者和所述保护对象的外表面导电且接地。
18.本实用新型与现有技术相比,具有如下的优点和有益效果:
19.通过系统控制器实时检测第二输入信号端的信号状态,确定工业机器人与保护对象是否接触,当信号状态为高电平,则表示保护对象与工业机器人接触,系统控制器即刻向机器人控制器发送暂停运动控制命令,机器人控制器基于暂停运动控制命令控制工业机器人停止运动,以保证保护对象的安全,解除安全隐患,实现对工业机器人全方位的碰撞检测和控制保护。
附图说明
20.此处所说明的附图用来提供对本实用新型实施例的进一步理解,构成本技术的一部分,并不构成对本实用新型实施例的限定。在附图中:
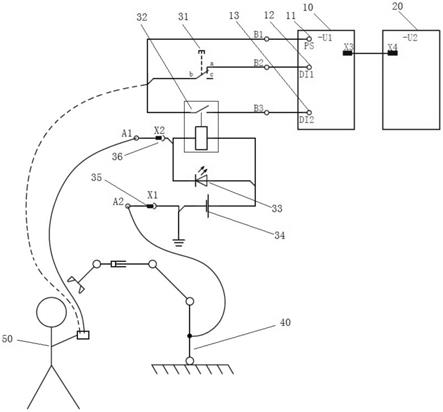
21.图1为本实用新型一种工业机器人防碰撞控制系统的原理图。
22.附图中标记及对应的零部件名称:
23.10
‑
系统控制器、20
‑
机器人控制器、11
‑
电源端子、12
‑
第一输入信号端、 13
‑
第二输入信号端、31
‑
按键、32
‑
继电器、33
‑
指示灯、34
‑
直流电源、35
‑
第一航插、36
‑
第二航插、40
‑
工业机器人、50
‑
操作者。
具体实施方式
24.为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本实用新型,并不作为对本实用新型的限定。
25.实施例
26.如图1所示,本实用新型提供一种工业机器人防碰撞控制系统,包括系统控制器(即图1中u1)10、机器人控制器(即图1中u2)20、继电器32和直流电源 34。其中,a1、a2、b1、b2和b3表示导线连接点。
27.其中,系统控制器10中设置有电源端子(即图1中ps端)11和第二输入信号端(即图1中di2端)13。电源端子11和第二输入信号端13分别连接在继电器32 的两端,继电器32连接在直流电源34的正极,直流电源34的负极接地。本实施例中直流电源34优选5v。
28.具体地,直流电源对系统控制器、机器人控制器、继电器、第一航插和第二航插通电,系统控制器实时检测第二输入信号端的信号状态。当保护对象与工业机器人接触时,继电器闭合,第二输入信号端输入高电平信号,系统控制器基于高电平信号向机器人控制器发送暂停运动控制命令,机器人控制器控制工业机器人停止运动。
29.进一步地,工业机器人防碰撞控制系统还包括按键31。其中,按键31的两端分别连接电源端子11和第一输入信号端(即图1中di1端)12。
30.进一步地,工业机器人防碰撞控制系统还包括第一航插(即图1中x1)35和第二航插(即图1中x2)36。
31.第一航插35连接在直流电源34的负极并接地,第二航插36连接在继电器32 的一端。
32.具体地,操作者50通过第一航插(即图1中x1)35和第二航插36控制按键31 是否导通,系统控制器10通过第一输入信号端12实时检测按键31是否导通。
33.当按键31导通(即图1中开关b打到c点处),则系统控制器10实时检测第一输入信号端12输入的信号,当第一输入信号端12输入的信号为上升沿信号,系统控制器10向机器人控制器20发送暂停运动控制命令,机器人控制器20控制工业机器人40停止运动。
34.当按键31断开(即图1中开关b打到a点处),则系统控制器10实时检测第一输入信号端12和第二输入信号端13的信号状态。当工业机器人40与操作者50或保护对象接触时,则继电器32闭合,第二输入信号端13输入高电平信号,系统控制器10基于高电平信号向机器人控制器20发送暂停运动控制命令,机器人控制器20控制工业机器人40停止运动。
35.进一步地,继电器32包括常开触点对和线圈。其中,电源端子11和第二输入信号端13分别连接在继电器32的常开触点对上;当操作者50或保护对象与工业机器人40接触时,继电器32的常开触点对和线圈均闭合。
36.进一步地,工业机器人防碰撞控制系统中还包括指示灯33,指示灯33并联在继电器32线圈的两端;当保护对象50与工业机器人40接触时,指示灯33亮。当保护对象50与工业机器人40没有接触时,指示灯33熄灭,以使操作者及时获知工业机器人的工作状态,并采取对应措施,避免碰撞伤害,同时实现对工业机器人全方位的碰撞检测和控制保护。
37.进一步地,系统控制器10和机器人控制器20可通过无线方式或有线方式连接。
38.进一步地,为保护工业机器人防碰撞控制系统的安全,防止其漏电,本实施例中工业机器人40的外壳、操作者50和保护对象的外表面导电且接地。
39.具体地,以上所述具体实施方式,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施方式而已,并不用于限定本实用新型的保护范围,凡在本实用新型的精神和原则之内,所做的任何修改、等同
替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1