一种用于儿童教育的限位抓手机器人的制作方法
1.本实用新型涉及儿童教育器具领域,尤其是涉及一种用于儿童教育的限位抓手机器人。
背景技术:
2.随着时代的发展,一种融合信息技术,秉承“开放创新、探究体验”教育理念,以“创造中学”为主要学习方式和以培养各类创新型人才为目的的新型教育模式应运而生。传统教育具有深深的工业化烙印,是典型的基于知识的教育(knowledge
‑
based education);现在的儿童教育则是适应知识经济时代发展的以能力为导向的教育(competence
‑
based education)。现在儿童教育是科学发明文化与教育的结合,基于学生兴趣,以项目学习的方式,使用数字化工具,倡导造物,鼓励分享,培养跨学科解决问题能力、团队协作能力和创新能力的一种素质教育。这种教育模式背后蕴含着丰富的教育理念,其中最突出的便是美国实用主义教育家杜威提出的“做中学”(learning by doing)思想。“做中学”也就是“从活动中学”、“从真实体验中学”,将所学知识与生活实践联系起来,知行合一。现代儿童也强调学生的主观感受,引导学生培养快乐、自主的学习习惯。这种教育内容往往与现实问题的解决紧密相关,是一种问题导向式教育,让学生发现现实问题,寻求创意的解决方法并通过努力使之变成现实。我们对此特别设计了一系列儿童教育机器人,针对的目标群体主要是8岁以上的儿童、青少年,为了提高学生的动手能力,培养发散性思维,儿童教育机器人由多种零件组成,用于学生自己动手利用各式各样的零件拼接成各式各样的组合体(机器人),因此相关零件的设计既要考虑多样化,又要考虑零件的标准化;不仅要考虑结构的合理强度,还要考虑轻便化,因而现有技术还有待改进和提高。
技术实现要素:
3.鉴于上述现有技术的不足之处,本实用新型的目的在于提供一种用于儿童教育的限位抓手机器人。
4.为解决以上技术问题,本实用新型采取了以下技术方案:
5.一种用于儿童教育的限位抓手机器人,包括夹爪和主控板,还包括底架,所述底架的两侧设置有移动轮,所述底架上还设置有电池和用于驱动夹爪移动的限位力臂机构,所述限位力臂机构与底架的固定处位于电池和主控板之间,所述夹爪装设于限位力臂机构上,所述夹爪、限位力臂机构、移动轮及电池均与所述主控板电性连接。
6.进一步的,所述的用于儿童教育的限位抓手机器人,所述限位力臂机构包括支撑臂、伸出臂和连接座,所述支撑臂包括一对平行的柱连杆,两个柱连杆之间设置有有第一连接轴和第二连接轴,所述第一连接轴与第二连接轴平行,且预设间隔距离,所述伸出臂包括互相平行的上连杆和下连杆,所述上连杆的一端与第一连接轴可转动地连接,所述下连杆的一端与第二连接轴可转动地连接,所述上连杆的另一端和所述下连杆的另一端与所述连接座铰接,所述第二连接轴上设置有驱动齿轮,所述驱动齿轮与所述下连杆固定连接,所述
驱动齿轮与所述下连杆同轴共转;限位力臂机构还包括限位开关传感器,所述限位开关传感器的底部具有一接触弹片,当下连杆抵触在接触弹片时,所述驱动齿轮停止继续运转。
7.进一步的,所述的用于儿童教育的限位抓手机器人,所述移动轮为履带轮。
8.进一步的,所述的用于儿童教育的限位抓手机器人,所述电池为电池盒,内设有可拆卸电池。
9.进一步的,所述的用于儿童教育的限位抓手机器人,履带轮的内侧设置有用于驱动履带轮运转的移动电机,所述移动电机与主控板电性连接。
10.进一步的,所述的用于儿童教育的限位抓手机器人,所述移动电机为两个、对称设置于履带轮的内侧、分别驱动履带轮的一前轮与一后轮的转动。
11.进一步的,所述的用于儿童教育的限位抓手机器人,所述限位力臂机构还包括驱动电机,所述驱动电机装设于支撑臂的一侧,所述驱动电机驱动所述驱动齿轮转动,所述驱动电机与所述主控板电性连接。
12.进一步的,所述的用于儿童教育的限位抓手机器人,所述支撑臂垂直伫立地固定于底架上。
13.进一步的,所述的用于儿童教育的限位抓手机器人,所述主控板位于限位力臂机构的伸出端方向、且位于履带轮的前轮和后轮之间,所述履带轮的前轮位于限位力臂机构的伸出端方向,所述履带轮的后轮位于限位力臂机构的伸出端反方向。
14.进一步的,所述的用于儿童教育的限位抓手机器人,所述限位力臂机构与底架的固定处靠近履带轮的后轮的装设处,所述电池位于履带轮的后轮的后上方。
15.相较于现有技术,本实用新型提供的一种用于儿童教育的限位抓手机器人,包括夹爪和主控板,还包括底架,所述底架的两侧设置有移动轮,所述底架上还设置有电池和用于驱动夹爪移动的限位力臂机构,所述限位力臂机构与底架的固定处位于电池和主控板之间,所述夹爪装设于限位力臂机构上,所述夹爪、限位力臂机构、移动轮及电池均与所述主控板电性连接,所述限位力臂机构包括支撑臂、伸出臂和连接座,所述支撑臂包括一对平行的柱连杆,两个柱连杆之间设置有有第一连接轴和第二连接轴,所述第一连接轴与第二连接轴平行,且预设间隔距离,所述伸出臂包括互相平行的上连杆和下连杆,所述上连杆的一端与第一连接轴可转动地连接,所述下连杆的一端与第二连接轴可转动地连接,所述上连杆的另一端和所述下连杆的另一端与所述连接座铰接,所述第二连接轴上设置有驱动齿轮,所述驱动齿轮与所述下连杆固定连接,所述驱动齿轮与所述下连杆同轴共转;限位力臂机构还包括限位开关传感器,所述限位开关传感器的底部具有一接触弹片,当下连杆抵触在接触弹片时,所述驱动齿轮停止继续运转,所述限位开关传感器与主控板电性连接。本实用新型的夹爪的尾端设置有电机,其与主控板电性连接,控制该电机可控制夹爪的张开、抓取运动。本实用新型作为一种儿童教育机器人,能够被控制抓取、移动物品,结构简单易组装,趣味性强,利于示教,有利于激发儿童的学习兴趣。本实用新型设置有限位开关传感器,其为一个弹片触碰开关,当伸出臂上台或下沉至某一角度,其接触弹片被抵触,从而触发开关停止运转,从而实现限位保护。
附图说明
16.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例
或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
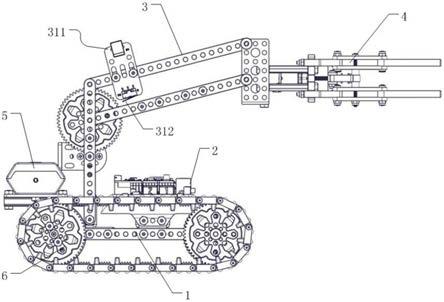
17.图1为本实用新型提供的用于儿童教育的限位抓手机器人的结构示意图。
18.图2为本实用新型提供的机械抓手机器人的限位力臂机构的结构示意图。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.需要说明,若本实用新型实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
21.另外,若本实用新型实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
22.如图1、图2所示,本实用新型提供的一种用于儿童教育的限位抓手机器人,包括夹爪4和主控板,还包括底架1,所述底架1的两侧设置有移动轮6,所述底架1上还设置有电池5和用于驱动夹爪4移动的限位力臂机构3,所述限位力臂机构3与底架1的固定处位于电池5和主控板之间,所述夹爪4装设于限位力臂机构3上,所述夹爪4、限位力臂机构3、移动轮6及电池5均与所述主控板电性连接。本实用新型的夹爪4的尾端设置有电机,其与主控板电性连接,控制该电机可控制夹爪4的张开、抓取运动。本实用新型作为一种儿童教育机器人,能够被控制抓取、移动物品,结构简单易组装,趣味性强,利于示教,有利于激发儿童的学习兴趣。进一步的,本实用新型提供的限位力臂机构3包括支撑臂301、伸出臂302和连接座306,所述支撑臂301包括一对平行的柱连杆,两个柱连杆之间设置有有第一连接轴309和第二连接轴310,所述第一连接轴309与第二连接轴310平行,且预设间隔距离,所述伸出臂302包括互相平行的上连杆303和下连杆304,所述上连杆303的一端与第一连接轴309可转动地连接,所述下连杆304的一端与第二连接轴310可转动地连接,所述上连杆303的另一端和所述下连杆304的另一端与所述连接座306铰接,所述第二连接轴310上设置有驱动齿轮307,所述驱动齿轮307与所述下连杆304固定连接,所述驱动齿轮307与所述下连杆304同轴共转,限位力臂机构3还包括限位开关传感器311,所述限位开关传感器311的底部具有一接触弹片312,当下连杆304抵触在接触弹片312时,所述驱动齿轮307停止继续运转,所述限位开关传感器311与主控板2电性连接。本实用新型设置有限位开关传感器311,其为一个弹片触碰开关,当伸出臂上台或下沉至某一角度,其接触弹片被抵触,从而触发开关停止运转,从而实现限位保护。
23.进一步的,本实用新型提供的用于儿童教育的限位抓手机器人,所述移动轮6为履带轮。
24.进一步的,本实用新型提供的用于儿童教育的限位抓手机器人,所述电池5为电池5盒,内设有可拆卸电池5。
25.进一步的,本实用新型提供的用于儿童教育的限位抓手机器人,履带轮的内侧设置有用于驱动履带轮运转的移动电机,所述移动电机与主控板电性连接。
26.进一步的,本实用新型提供的用于儿童教育的限位抓手机器人,所述移动电机为两个、对称设置于履带轮的内侧、分别驱动履带轮的一前轮与一后轮的转动。
27.进一步的,本实用新型提供的用于儿童教育的限位抓手机器人,所述主控板位于限位力臂机构3的伸出端方向、且位于履带轮的前轮和后轮之间,所述履带轮的前轮位于限位力臂机构3的伸出端方向,所述履带轮的后轮位于限位力臂机构3的伸出端反方向。
28.进一步的,本实用新型提供的用于儿童教育的限位抓手机器人,所述限位力臂机构3与底架1的固定处靠近履带轮的后轮的装设处,所述电池5位于履带轮的后轮的后上方。
29.进一步的,所述下连接杆为一对平行杆。进一步的,所述下连接杆的平行杆之间设置有固定块305。所述固定块305的设置有利于大大提升下连接杆的结构强度,所述接触弹片312与一固定块抵触配合。进一步的,所述固定块305为两个、间隔设置。进一步的,本实用新型提供的限位力臂机构3还包括驱动电机308,所述驱动电机308装设于支撑臂301的一侧,所述驱动电机308驱动所述驱动齿轮307转动,所述驱动电机308与所述主控板电性连接。进一步的,所述驱动电机308设置于靠近驱动齿轮307的一侧,所述驱动电机308的输出部位于所述支撑臂301的内侧、并与所述驱动齿轮307啮合。进一步的,所述支撑臂301垂直伫立地固定于底架1上,有利于保障限位力臂机构3装配于儿童教育机器人上的稳定性。进一步的,所述上连杆303为单杆、位于所述下连杆304的平行杆之间的中心线正上方。进一步的,所述连接座306为u形构件、其u形开口朝上设置。
30.综上所述,本实用新型的夹爪的尾端设置有电机,其与主控板电性连接,控制该电机可控制夹爪的张开、抓取运动。本实用新型作为一种儿童教育机器人,能够被控制抓取、移动物品,结构简单易组装,趣味性强,利于示教,有利于激发儿童的学习兴趣。本实用新型设置有限位开关传感器,其为一个弹片触碰开关,当伸出臂上台或下沉至某一角度,其接触弹片被抵触,从而触发开关停止运转,从而实现限位保护。
31.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的实用新型构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1