自动手套点断装置的制作方法
1.本实用新型涉及机械加工领域,特别涉及一种自动手套点断装置。
背景技术:
2.在加工手套制品时,手套的主料和余料通常为粘连的方式连接,现有技术中,通常需要人工将余料从主料处撕下或使用刀片裁切开,这样容易使得工人的手指和刀片接触而引发安全事故,且无法根据使用要求自行进行切割,生产效率较低,费时费力。
3.为此,我们急需一种能够自动裁切手套的机械装置。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种能够自动裁切的自动手套点断装置。
5.本实用新型通过以下技术方案实现:
6.一种自动手套点断装置,包括:送料机构和与送料机构相连的点断机构、侧拉机构和扯料机构,同时,点断机构、侧拉机构和扯料机构沿着方向a依次平行排列;
7.点断机构包括第二电机和点断组件,第二电机与点断组件相连;
8.侧拉机构包括一对拉扯组件,一对拉扯组件对称放置于送料机构两侧;拉扯组件包括第三电机和夹持部,第三电机的一端与夹持部固定连接;
9.扯料机构包括第五电机、第二压板和插板,第二压板与第五电机相连,第五电机带动第二压板上下运动从而使得第二压板与插板之间的空隙减小或增大;
10.控制系统,控制系统与手套点断装置相连使得手套点断装置进行自动运转。
11.进一步的,点断机构还包括第二支架,第二电机和点断组件均固定安装于第二支架上。
12.进一步的,点断组件包括刀具、顶针、顶柱、支柱、导向板和限位板;导向板和限位板平行摆放,支柱设置于导向板和限位板之间并将两者固定连接;刀具、一对顶针和顶柱均与导向板固定连接。
13.进一步的,限位板上设有若干通孔,若干通孔位置与一对顶针和顶柱对应。
14.进一步的,拉扯组件还包括导柱和固定板,导柱的一端与固定板可转动的连接,另一端与夹持部固定连接。
15.进一步的,夹持部与送料机构送料的方向a呈
‑
45
°
~45
°
之间的任意角度。
16.进一步的,扯料机构还包括侧板,插板和第五电机均固定连接于侧板。
17.进一步的,以上所有动作均通过控制系统进行控制运转,控制系统包括主控制器、电源模块、通信接口和检测模块。
18.进一步的,电源模块与主控制器相连,所有执行步骤均在电源通电时执行;通信接口与主控制器相连,主控制器向通信接口发送指令,自动手套点断装置开启;检测模块与主控制器相连,检测模块使得点断机构、侧拉机构和扯料机构可以检测原料是否到达各个位
置,并传输数据给主控制器,从而使得主控制器能够适时的控制各个机构运动。
19.进一步的,原料包括余料和主料,余料和主料通过第一粘连处、第二粘连处、第三粘连处和第四粘连处以粘连的形式连接。
20.相比于现有技术,本实用新型的优点在于:
21.1、本实用新型采用了多种机构的连续自动配合从而将余料和主料分离,代替了人工拆卸,提高工作效率。
附图说明
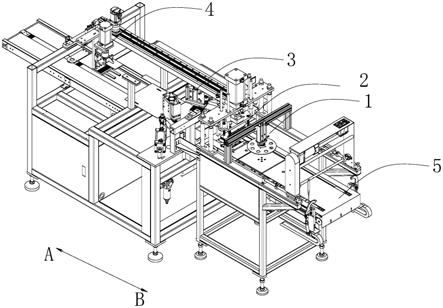
22.图1为本实用新型的自动手套点断装置的装配结构示意图;
23.图2为本实用新型的旋转机构的结构示意图;
24.图3为本实用新型的旋转机构的侧视图;
25.图4为本实用新型的点断机构的结构示意图;
26.图5为本实用新型的点断组件的结构示意图;
27.图6为本实用新型的原料的结构示意图;
28.图7为本实用新型的侧拉机构的结构示意图;
29.图8为本实用新型的扯料机构的结构示意图;
30.图9为本实用新型的送料机构的结构示意图;
31.图10为本实用新型的控制系统的结构示意图;
32.图11为本实用新型的若干原料堆叠的结构示意图。
33.图中标号:100
‑
自动手套点断装置,1
‑
旋转机构,2
‑
点断机构,3
‑
侧拉机构,4
‑
扯料机构,5
‑
送料机构,6
‑
原料,101
‑
第一支架,102
‑
第一旋转电机,103
‑
压盘,104
‑
顶升板,105
‑
第一电机,106
‑
第二旋转电机,201
‑
第二电机,202
‑
第二支架,203
‑
点断组件,2031
‑
刀具,2032
‑
顶针,2033
‑
顶柱,2034
‑
通孔,2035
‑
支柱,2036
‑
中空部,2037
‑
限位板,2038
‑
锯齿,2039
‑
导向板,31
‑
拉扯组件,301
‑
第三电机,302
‑
导柱,303
‑
夹持部,304
‑
第一压板,305
‑
底板,306
‑
固定板,307
‑
第四电机,308
‑
支撑板,309
‑
空隙,401
‑
第五电机,402
‑
第二压板,403
‑
插板,404
‑
侧板,405
‑
空隙,501
‑
压杆,502
‑
压爪,503
‑
第三支架,504
‑
载带,505
‑
传动组件,601
‑
第一粘连处,602
‑
第二粘连处,603
‑
第三粘连处,604
‑
第四粘连处,605
‑
余料,606
‑
主料,7
‑
控制系统,701
‑
主控制器,702
‑
电源模块,703
‑
通信接口,704
‑
检测模块。
具体实施方式
34.以下结合较佳实施例及其附图对实用新型技术方案作进一步非限制性的详细说明。在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
35.如图1所示,本实用新型一较佳实施例的一种自动手套点断装置100,包括旋转机构1、点断机构2、侧拉机构3、扯料机构4和送料机构5,其中,旋转机构1、点断机构2、侧拉机构3和扯料机构4均与送料机构5相连,同时,沿着送料方向a按照旋转机构1、点断机构2、侧拉机构3和扯料机构4依次平行排列,用于对原料6的多次加工。
36.如图2~3所示,旋转机构1包括第一支架101、第一旋转电机102、压盘103、顶升板104、第一电机105和第二旋转电机106。第一支架101固定安装于送料机构5上,第一旋转电机102固定安装于第一支架101上,第一旋转电机102底部与压盘103相连,第一旋转电机102能够带动压盘103旋转,优选的,压盘103为圆盘状,压盘103正下方设有顶升板104,其与第一电机105和第二旋转电机106相连,第一电机105能够带动顶升板104在竖直方向上来回运动,第二旋转电机106能够带动顶升板104在水平面内旋转,优选的,第一旋转电机102和第二旋转电机106同步转动。
37.如图4~5所示,点断机构2包括第二电机201、第二支架202和点断组件203,第二电机201和点断组件203均固定安装于第二支架202上,第二电机201的底部与点断组件203相连。点断组件203包括刀具2031、顶针2032、顶柱2033、支柱2035、导向板2039和限位板2037,导向板2039和限位板2037平行摆放,支柱2035设置于导向板2039和限位板2037之间并将两者固定连接,限位板2037上设有若干通孔2034,若干通孔2034位置与一对顶针2032和顶柱2033对应;刀具2031、一对顶针2032和顶柱2033均与导向板2039固定连接,顶柱2033设置于一对顶针2032中间,顶针2032用于将原料6钉紧,顶柱2033用于将原料6压实,刀具2031与一对顶针2032和一个顶柱2033平行设置,刀具2031为排状长刀,其刀刃处具有多个用于裁切原料6的锯齿2038。第二电机201的带动刀具2031、一对顶针2032和顶柱2033上下运动,一对顶针2032和顶柱2033从若干通孔2034穿进穿出,刀具2031从限位板2037的中空部2036穿进穿出。
38.如图6所示,原料6包括余料605和主料606,余料605和主料606通过粘连的形式连接在一起,具体的,两者通过第一粘连处601、第二粘连处602、第三粘连处603和第四粘连处604以粘连的形式连接。
39.如图7所示,侧拉机构3包括一对拉扯组件31,一对拉扯组件31对称放置于送料机构5前进方向a的两侧并与送料机构5固定连接,拉扯组件31包括第三电机301、导柱302、固定板306和夹持部303,导柱302一端与固定板306可转动的连接,另一端与夹持部303固定连接,第三电机301的一端固定于固定板306上,另一端与夹持部303相连,第三电机301能够将夹持部303向前推动或向后拉扯,同时,导柱302限制夹持部303的方向,优选的,夹持部303与送料机构5的送料方向a呈
‑
45
°
~45
°
之间的任意角度。夹持部303包括第一压板304、底板305、第四电机307和支撑板308,第一压板304和底板305平行设置应分别与支撑板308固定连接,第四电机307设置于第一压板304上部并与其固定连接,同时,第四电机307一侧固定安装于支撑板308上,底板305固定不动,第四电机307带动压板304能够上下移动,当压板304向下运动时,压板304与底板305之间的空隙309减小,可以将若干原料6夹紧,当压板304向上运动时,压板304与底板305之间的空隙309增大,可以将若干原料6放松。
40.如图8所示,扯料机构4包括第五电机401、第二压板402、插板403和侧板404,第二压板402与第五电机401相连,插板403和第五电机401均固定连接于侧板404,第二压板402和插板403平行设置,第五电机401带动第二压板402上下运动从而使得第二压板402与插板
403之间的空隙405减小或增大,当空隙405减小时,可用于夹持原料6,当空隙405增大时,可将原料6松开。
41.如图9所示,送料机构5包括压杆501、压爪502、第三支架503、载带504和传动组件505。载带为长条状,其贯穿于旋转机构1、点断机构2、侧拉机构3和扯料机构4,即以上机构的物料转移均通过送料机构5来实现,载带504底部与传动组件505相连,传动组件505用于带动载带504向方向a运动,载带504上方设有压杆501,其固定安装于第三支架503上,压杆501用于在原料6刚送入自动手套点断装置100时,将原料6压平,在载带504的两端设有一对压爪502,在原料6刚送入载带504时,压爪502会扣合从而将原料6夹紧使其紧贴载带504,并且,一对压爪502与载带504可同步向方向a运动,使得原料6在裁切加工过程中,能够一直被夹紧,防止其窜动而导致加工位置不准确。
42.如图11所示,使用时,将若干堆叠摆放的原料6放置于载带504上,此时压爪502扣合使得若干原料6紧贴载带504,压杆501将若干原料6压平,压爪502和载带504一同向着方向a运动,当原料6运动至旋转机构1时,第一电机105带动顶升板104向上运动,待顶升板104与压盘103将若干原料6夹紧后,第一旋转电机102带动压盘103水平面内旋转,第二旋转电机106带动顶升板104在水平面内旋转,压盘103和顶升板104为同步转动,以此带动若干原料6在空间内旋转,直至第三粘连处603朝着方向a,然后第一电机105带动顶升板104向下运动,若干原料6继续转移至点断机构2。当若干原料6运载至点断机构2正下方,同时刀具2031正对第一粘连处601时,第二电机201带动刀具2031、一对顶针2032和顶柱2033向下运动,一对顶针2032和顶柱2033将若干原料6向下压紧固定,刀具2031将第一粘连处601裁切,余料605和主料606在第一粘连处601断开,然后第二电机201带动刀具2031、一对顶针2032和顶柱2033向上运动,刀具2031与若干原料6分离,若干原料6在载带504的带动下进入侧拉机构3。当若干原料6进入到侧拉机构3的一对拉扯组件31中间时,一对第三电机301带动一对夹持部303分别向靠近若干原料6的方向移动,然后,第四电机307带动压板304向下运动,一对压板304和一对底板305分别将若干原料6的第二粘连处602和第四粘连处604夹紧,之后,扯料机构4向着方向b运动,直至接触到第三粘连处603,第五电机401带动第二压板402向下运动使得第二压板402与插板403将若干原料6的第三粘连处603夹紧,然后,一对第三电机301带动一对夹持部303分别向远离若干原料6的方向移动,扯料机构4向着方向a运动,使得余料605和主料606从第二粘连处602、第三粘连处603和第四粘连处604断开,至此,余料605和主料606完全脱离,载带504将余料605和主料606运动至载带504顺着方向a的末端,工作人员将余料605和主料606收起。自此,一个工作循环结束。本实用新型采用旋转机构1,可将若干原料6旋转至第三粘连处603朝着方向a,避免了人工识别原料6的摆放方向以及人工对原料6的摆放进行旋转,省时省力。同时,采用了多种机构的连续自动配合从而将余料605和主料606分离,代替了人工拆卸,提高工作效率。
43.如图10所示,以上所有动作均通过控制系统7进行控制运转,控制系统7包括主控制器701、电源模块702、通信接口703和检测模块704,电源模块702与主控制器701相连,所有执行步骤均在电源通电时执行;通信接口703与主控制器701相连,主控制器701向通信接口703发送指令,自动手套点断装置100开启;检测模块704与主控制器701相连,检测模块704使得一对压爪502能够检测原料6是否已放置于载带504上,当检测到原料6放置于载带504上时,检测模块704传输信号给主控制器701,主控制器701控制一对压爪502扣合从而将
原料6夹紧;检测模块704还使得旋转机构1、点断机构2、侧拉机构3和扯料机构4可以检测原料6是否到达其各个位置,并传输数据给主控制器701,从而使得主控制器701能够适时的控制各个机构运动;检测模块704还使得旋转机构1检测原料6的第三粘连处603是否朝着方向a,如第三粘连处603并未朝着方向a,则检测模块704传输数据给主控制器701,使得主控制器701控制旋转机构1带动原料6旋转直至第三粘连处603朝向方向a。
44.以上实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1