一种全自动可升降的协作型移动机器人的制作方法
1.本实用新型涉及智能机器人领域,具体是涉及一种全自动可升降的协作型移动机器人。
背景技术:
2.随着协作机器人和移动机器人的飞速发展,在高度不同、位置不同的抓取场合,如工厂、零售等场景下,对于可升降、可移动、可定位的复合机器人的需求越来越大,灵活性要求越来越高。目前国内大部分采用只是手动拣货移动,或者用移动机器人以及固定安装的机器人的方式,来实现物体的转运以及抓取,大部分的应用场景无法满足。
3.目前市面上以单一自动化方式实现转运的机器人,通常设备集成度较差,可靠性无法保证;转运物体灵活性较差,一些场合需要专用治具平台定位,无法做到灵活性的要求;无升降功能,造成高处物体无法转运;综合使用成本高,尤其辅助工作需要大量人工,成本较高,在使用过程中十分的不便。
技术实现要素:
4.为解决上述技术问题,提供一种全自动可升降的协作型移动机器人,本技术方案解决了上述背景技术中提出的目前市面上以单一自动化方式实现转运的机器人,通常设备集成度较差,可靠性无法保证;转运物体灵活性较差,一些场合需要专用治具平台定位,无法做到灵活性的要求;无升降功能,造成高处物体无法转运;综合使用成本高,尤其辅助工作需要大量人工,成本较高,在使用过程中十分的不便的问题。
5.为达到以上目的,本实用新型采用的技术方案为:
6.一种全自动可升降的协作型移动机器人,包括:
7.移动安装组件:用于进行机器人的移动以及部件的安装,包括移动底盘、安装底座以及安装支架,所述安装底座固定连接在移动底盘的上端,所述安装支架固定连接在安装底座上端;
8.控制模块:用于对机器人的动作进行控制,包括控制面板、机器人控制器、电源模块、传感器、hub集线器、升降柱控制器、工控机以及夹持器控制器,所述控制面板固定连接在主梁上,所述机器人控制器固定连接在安装底座上端,所述电源模块固定连接于安装底座上端,所述传感器固定连接在主梁下端,所述hub集线器固定连接在安装板一侧,所述升降柱控制器、工控机以及夹持器控制器固定连接于安装板的另一侧;
9.抓取组件:用于抓取物体,包括升降柱、协作机器人、智能夹持器、深度相机、坦克链,所述升降柱固定连接于安装底座的上端后部,所述协作机器人固定连接于升降柱的上端,所述智能夹持器以及深度相机固定连接于协作机器人的顶部,所述坦克链一端固定连接在主梁上,所述坦克链另一端固定连接在升降柱上。
10.优选的,所述移动底盘包括转向轮、支撑轮、移动轮以及激光扫描仪,所述转向轮转动连接在移动底盘的底面前端,所述支撑轮转动连接在移动底盘底面的中部两侧,所述
移动轮转动连接在移动底盘的底面后端,所述激光扫描仪固定连接在移动底盘的侧面底部。
11.优选的,所述安装支架包括竖杆、主梁、横梁、安装板以及加强杆,所述竖杆固定连接于安装底座的上端,所述主梁固定连接于竖杆的顶端,所述横梁固定连接在主梁的两端,所述安装板固定连接在主梁的中部,所述加强杆固定连接在竖杆中部偏下的位置。
12.与现有技术相比,本实用新型的优点在于:
13.1)有完整移动底盘、可上下升降结构、6轴协作型关节机器人,整体结构紧凑,能保证机器人在水平以及垂直方向均可以获得相应行程,使用上更加灵活;
14.2)配有智能夹持器以及深度相机,有视觉以及力感知,操作上比较方便;
15.3)在使用上,不需要多种专用治具,无专用治具的成本消耗,无需等待专用治具的制作周期,节约投产前的准备时间;
16.4)降低大量的人工成本,单位时间内显著提高了生产效率,有利于企业的大订单扩产计划;
17.5)可扩展性更好,可以用于更多用途的物体的抓取。
附图说明
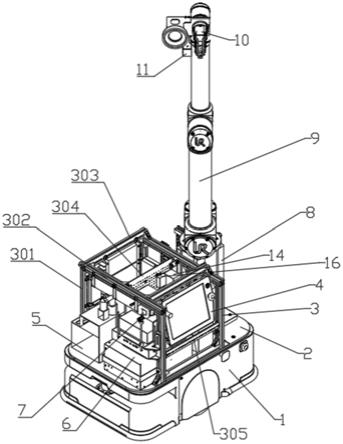
18.图1为本实用新型的侧面立体结构示意图;
19.图2为本实用新型的另一侧面立体结构示意图;
20.图3为本实用新型的背面立体结构示意图。
21.图中标号为:
22.1、移动底盘;101、移动轮;102、转向轮;103、支撑轮;104、激光扫描仪;2、安装底座;3、安装支架;301、竖杆;302、主梁;303、横梁;304、安装板;305、加强杆;4、控制面板;5、机器人控制器;6、电源模块;7、传感器;8、升降柱;9、协作机器人;10、智能夹持器;11、深度相机;12、hub集线器;13、升降柱控制器;14、工控机;15、坦克链;16、夹持器控制器。
具体实施方式
23.以下描述用于揭露本实用新型以使本领域技术人员能够实现本实用新型。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
24.参照图1-3所示,一种全自动可升降的协作型移动机器人,包括:
25.移动安装组件:用于进行机器人的移动以及部件的安装,包括移动底盘1、安装底座2以及安装支架3,安装底座2固定连接在移动底盘1的上端,安装支架3固定连接在安装底座2上端;
26.控制模块:用于对机器人的动作进行控制,包括控制面板4、机器人控制器5、电源模块6、传感器7、hub集线器12、升降柱控制器13、工控机14以及夹持器控制器16,控制面板4固定连接在主梁302上,控制面板4方便对机器人的整体运行参数进行监控,并可通过控制面板4对机器人进行程序调整,机器人控制器5固定连接在安装底座2上端,电源模块6固定连接于安装底座2上端,传感器7固定连接在主梁302下端,传感器7实时检测周围环境的变化,并通过工控机14计算后,把结果通过通信回传到中央系统,hub集线器12固定连接在安装板304一侧,升降柱控制器13、工控机14以及夹持器控制器16固定连接于安装板304的另
一侧;
27.抓取组件:用于抓取物体,包括升降柱8、协作机器人9、智能夹持器10、深度相机11、坦克链15,升降柱8固定连接于安装底座2的上端后部,协作机器人9固定连接于升降柱8的上端,智能夹持器10以及深度相机11固定连接于协作机器人9的顶部,坦克链15一端固定连接在主梁302上,坦克链15另一端固定连接在升降柱8上。
28.移动底盘1包括转向轮102、支撑轮103、移动轮101以及激光扫描仪104,转向轮102转动连接在移动底盘1的底面前端,转向轮102在移动时可以根据地形控制行进方向,支撑轮103转动连接在移动底盘1底面的中部两侧,移动轮101转动连接在移动底盘1的底面后端,支撑轮103以及移动轮101可以使移动底盘进行移动,激光扫描仪104固定连接在移动底盘1的侧面底部,移动底盘1会根据激光扫描仪104扫描的反馈形成周围空间地图,根据上位机指令,基于自身的导航技术行走到对应位置。
29.安装支架3包括竖杆301、主梁302、横梁303、安装板304以及加强杆305,竖杆301固定连接于安装底座2的上端,主梁302固定连接于竖杆301的顶端,横梁303固定连接在主梁302的两端,安装板304固定连接在主梁302的中部,加强杆305固定连接在竖杆301中部偏下的位置,安装支架3为机器人控制模块以及抓取组件提供了安装空间。
30.本实用新型的具体工作流程如下:
31.s1.移动底盘1会根据激光扫描仪104扫描的反馈形成周围空间地图,根据上位机指令,基于自身的导航技术行走到对应位置。
32.s2.升降柱8的高度由中央调度系统控制,升降柱控制器13接受对应指令控制升降柱8升高或者降低到对应位置,然后机器人控制器5控制协作机器人9到达对中央系统指定的位置,
33.s3.启动深度相机11确定具体抓取物的详细位置,经计算后把坐标偏差传给机器人控制器5,纠正协作机器人9的姿态;
34.s4.接着控制指令由机器人控制器5发给夹持器控制器16,控制智能夹持器10抓取物体。
35.s5.物体抓取后,协作机器人9收回机械臂,升降柱8降低或者升高到指定位置,移动底盘1把抓取的物体运输到指定地点。
36.综上所述,本实用新型的优点在于;抓取灵活,自动化程度高,操作方便;无需专业治具,通用性高;降低人工成本,提高工作效率,十分适合在实际的生产中推广使用。
37.以上显示以及描述了本实用新型的基本原理、主要特征以及本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例以及说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神以及范围的前提下本实用新型还会有各种变化以及改进,这些变化以及改进都落入要求保护的本实用新型的范围内。本实用新型要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1