电液混合驱动的高负载六自由度运动平台
1.本实用新型涉及六自由度运动平台技术领域,具体涉及一种电液混合驱动的高负载六自由度运动平台。
背景技术:
2.已知的,六自由度运动平台的基本结构是由作动器、动平台和定平台构成,定平台固定不动,借助作动器的伸缩运动,从而动平台完成在空间内六个自由度的运动。目前六自由度运动平台基本上采用stewart结构形式,其广泛应用于各种训练模拟器,如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域,具有重大的经济价值和国防战略意义。
3.六自由度运动平台的驱动方式主要有液压、电动、气动三种方式。使用液压驱动的六自由度运动平台刚度较大、承载能力强,但其作动器伸缩速度和精度较差、维护复杂、成本较高;使用电动驱动的六自由度运动平台作动器伸缩速度和精度较高、维护简单、成本低,但其承载能力较弱;使用气压驱动的六自由度运动平台压缩性大、使用环保无污染,但其密封性要求高、噪音大、稳定性不好。
4.由于传统的六自由度运动平台承载能力较弱、高频运动时稳定性较差,有时模拟与真实情况相差较远,因此需要对六自由度运动平台现有的缺陷进行改进。
技术实现要素:
5.为克服背景技术中存在的不足,本实用新型提供了一种电液混合驱动的高负载六自由度运动平台,本实用新型中液压缸可以对平台保持一定的推力,减小电动缸的受力,提高了平台的承载能力和稳定性,电动缸上装有位移传感器,用来进行反馈控制,平台的运动精度也相应提高等。
6.为实现如上所述的发明目的,本实用新型采用如下所述的技术方案:
7.一种电液混合驱动的高负载六自由度运动平台,包括动平台、定平台、电动缸和液压缸,在所述定平台的上面间隔设有复数个电动缸,每个电动缸的下端分别通过下虎克铰连接定平台,在电动缸的上方设有动平台,每个电动缸的上端分别通过上虎克铰连接动平台,在动平台与定平台之间设有液压缸,所述液压缸的下端通过下球铰与定平台连接,液压缸的上端通过上球铰与动平台连接形成所述的电液混合驱动的高负载六自由度运动平台。
8.所述的电液混合驱动的高负载六自由度运动平台,所述电动缸设置为六个,六个电动缸并联连接。
9.所述的电液混合驱动的高负载六自由度运动平台,每相邻两个下虎克铰之间的夹角为110
º
~130
º
。
10.所述的电液混合驱动的高负载六自由度运动平台,所述每个电动缸上分别设有传感器。
11.所述的电液混合驱动的高负载六自由度运动平台,所述液压缸上设有传感器。
12.所述的电液混合驱动的高负载六自由度运动平台,所述电动缸和液压缸上分别设有惯性测量单元。
13.所述的电液混合驱动的高负载六自由度运动平台,所述传感器为位移传感器。
14.所述的电液混合驱动的高负载六自由度运动平台,所述液压缸外接压力源,所述压力源连接控制系统。
15.所述的电液混合驱动的高负载六自由度运动平台,所述动平台的外形为正六边形结构。
16.所述的电液混合驱动的高负载六自由度运动平台,所述定平台的外形为正六边形结构。
17.采用如上所述的技术方案,本实用新型具有如下所述的优越性:
18.本实用新型中安装在动平台和定平台之间的液压缸可以对平台保持一定的推力,其伴随动平台的移动而移动,每个电动缸上还装有位移传感器和惯性测量单元,主要用来进行反馈控制,本实用新型能够提高平台的稳定性并增加平台的举升位移,液压缸减小了电动缸的受力,提高了平台的承载能力,由于增加了反馈控制功能,平台的运动精度也相应提高等,本实用新型具有使用精度较高、维护简单、成本低等特点,适合大范围的推广和应用。
附图说明
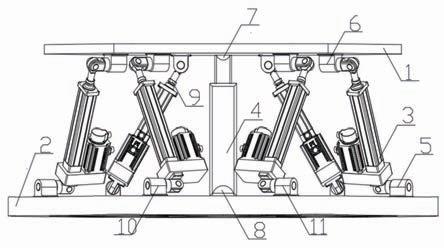
19.图1为本实用新型的结构示意图;
20.图2为本实用新型中反馈控制流程图;
21.图3为本实用新型实施例中各电动缸和液压缸代号示意图;
22.在图中:1、动平台;2、定平台;3、电动缸;4、液压缸;5、下虎克铰;6、上虎克铰;7、上球铰;8、下球铰;9、传感器;10、虎克铰组合组件a;11、虎克铰组合组件b。
具体实施方式
23.通过下面的实施例可以更详细的解释本实用新型,本实用新型并不局限于下面的实施例;
24.结合附图1所述的一种电液混合驱动的高负载六自由度运动平台,包括动平台1、定平台2、电动缸3和液压缸4,所述定平台2的外形为正六边形结构,在定平台2的上面间隔设有复数个电动缸3,每个电动缸3的下端分别通过下虎克铰5连接定平台2,在电动缸3的上方设有动平台1,所述动平台1的外形为正六边形结构,每个电动缸3的上端分别通过上虎克铰6连接动平台1,在动平台1与定平台2之间设有液压缸4,所述液压缸4外接压力源,所述压力源连接控制系统,可以通过控制系统控制压力源对液压缸4加大压力,使其伸缩时间大幅降低,所述液压缸4的下端通过下球铰8与定平台2连接,液压缸4的上端通过上球铰7与动平台1连接形成所述的电液混合驱动的高负载六自由度运动平台。
25.进一步,在具体实施时,所述电动缸3设置为六个,六个电动缸3并联连接,六个电动缸3的设置位置如图1所示,每相邻两个下虎克铰5之间的夹角为110
º
~130
º
,实施时,如图1所示,将相邻的两下虎克铰5分别记作虎克铰组合组件a10、虎克铰组合组件b11,虎克铰组合组件a10与虎克铰组合组件b11构成一组结构组合,虎克铰组合组件a10与虎克铰组合
组件b11之间的夹角为110
º
~130
º
。
26.进一步,所述每个电动缸3上分别设有传感器9,所述液压缸4上设有传感器9;电动缸3和液压缸4上分别设有惯性测量单元,所述传感器9为位移传感器。
27.本实用新型在实施时,如图1所示,图1为平台的初始状态,液压缸4处于最大压缩状态,六个电动缸3的活塞杆处于同一伸长状态,动平台1与定平台2处于水平状态。如图2所示,当平台运动时,计算机会根据给定的平台位姿,计算出各电动缸3及液压缸4的相应位置和速度后向控制器发出指令信号,控制器紧接着向各驱动器发出控制命令带动电动缸3及液压缸4做伸缩运动,从而控制运动平台按照预定的轨迹运动。当动平台1到达给定的位姿后,电动缸3及液压缸4的速度指令信号为零,动平台1停止运动。在动平台1运动的过程中,各传感器9不断地向控制器发出位置反馈和状态反馈的信号,从而大幅度提高了动平台1的运动精度。
28.工作时,液压缸4和六个电动缸3均有独立的动力输出,电动缸3及液压缸4能够在空间中实现独立的伸缩运动,通过控制液压缸4和六个电动缸3的伸缩量,从而可以将不同大小和方向的力和力矩作用到动平台1,使得动平台1完成空间中的六自由度运动,六自由度分别指的是平台沿着x、y、z轴的平移和绕x、y、z轴的转动。如图3所示,在驱动力的作用下,若电动缸3(d1、d2)处于最大的伸长状态,电动缸3(d4、d5)处于最大压缩状态,电动缸3(d3、d6)伸缩量保持不变,液压缸y1随动平台1运动并绕上球铰7、下球铰8转动,此时动平台1处于最大的平移位置。若电动缸3(d2、d3)处于最大压缩状态,电动缸3(d4、d5)处于最大的伸长状态,电动缸3(d1、 d6)伸缩量保持不变,液压缸y1随动平台1伸长运动并绕上球铰7、下球铰8转动,此时动平台1的位置为最大的倾斜位置。若电动缸3(d1、d2、d3、d4、d5、d6)均处于最大的伸长状态,液压缸y1随动平台1伸长运动,此时动平台1处于最大的举升位置。
29.另外,本实用新型在实施时还可以设置警报装置,当平台的某个缸超出其运动范围时,限位系统发出警报,并执行相应保护措施。当平台出现超载时,系统会立即发出警报关闭系统,及时地保护运动平台。当系统发出严重故障时,系统将会直接切断整个系统电源,令平台立即停止运动,避免运动平台受到碰撞损坏等。
30.本实用新型的优点如下:
31.本实用新型可通过对六个电动缸3的分别控制实现水平、横向、纵向、俯仰、侧倾和横摆六个自由度的运动。本实用新型的六自由度运动平台能够提高平台的稳定性并增加平台的举升位移,液压缸4减小了电动缸3的受力,提高了平台的承载能力,由于增加了反馈控制功能,平台的运动精度也相应提高。
32.安装在动平台1和定平台2之间的液压缸4可以对平台保持一定的推力,其伴随动平台的移动而移动。每个电动缸3上设置的位移传感器和惯性测量单元,主要用来进行反馈控制。
33.本实用新型能够提高平台的稳定性并增加平台的举升位移,液压缸4减小了电动缸3的受力,提高了平台的承载能力,由于增加了反馈控制功能,平台的运动精度也相应提高等。
34.本实用新型可以应用于各种训练模拟器、动感座椅和娱乐设备等领域。
35.本实用新型未详述部分为现有技术。
36.为了公开本实用新型的发明目的而在本文中选用的实施例,当前认为是适宜的,
但是,应了解的是,本实用新型旨在包括一切属于本构思和发明范围内的实施例的所有变化和改进。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1