一种操纵手柄复合动作机械定位机构的制作方法
1.本实用新型属于操作手柄复合动作定位技术领域,具体涉及一种操纵手柄复合动作机械定位机构。
背景技术:
2.农耕机是一种农用机械,具有新型和智能化的特点,随着现代社会农业的迅速发展,科技技术的更新,农业越来越产业化,农民需要借助大量的农耕机器来辅助完成工作,面对各种各样的地理环境便衍生出了集先进科学技术的农耕机,因此也需要更为合适的操作手柄复合动作定位,当下的换挡机构十分的落后,不能匹配自动化程度较高的农耕机,例如调节机身高度,稳定机身或者输出功率的多级调节等等,因此需要一种灵活调节,多档位,制造简单的换挡机构,本实用新型设计了一种操纵手柄复合动作机械定位机构很好的达到了上述效果。
技术实现要素:
3.针对上述背景技术所提出的问题,本实用新型的目的是:旨在提供一种操纵手柄复合动作机械定位机构。
4.为实现上述技术目的,本实用新型采用的技术方案如下:一种操纵手柄复合动作机械定位机构,包括换挡轮盘,所述换挡轮盘安装有若干档位滑片,所述档位滑片两侧一体成型有滑块,所述滑块设置有弹簧顶柱,所述档位滑片前端焊接有位移杆,所述换挡轮盘设置有与弹簧顶柱匹配的让位孔,所述换挡轮盘设置有与滑块匹配的滑槽,所述位移杆贯穿于换挡轮盘,所述换挡轮盘套设有固定盘,所述固定盘贯穿连接有拉杆,所述拉杆一端螺纹连接有限位块,另一端铰接有套杆,所述套杆内安装有第一弹簧,所述第一弹簧连接有连接杆,所述连接杆焊接有抓手,所述连接杆一端螺纹连接有手柄,所述手柄内套设有推杆,所述推杆连接有第二弹簧,所述推杆另一端呈台阶状,头部呈一斜面,所述推杆滑动连接有收缩块,所述收缩块固定连接有第三弹簧,所述第三弹簧固定连接在连接杆,所述收缩块设有与推杆匹配的斜面,所述推杆贯穿于连接杆内部,所述换挡轮盘匹配有外壳,所述固定盘匹配有防尘罩。
5.进一步限定,所述档位滑片上开设有抓取孔和固定凹槽,这样的设计,方便抓取档位滑片和定位套杆。
6.进一步限定,所述滑块末端安装有限位垫片,这样的设计,防止档位滑片弹出,造成事故。
7.进一步限定,所述连接杆一侧设置有止转面和止推块,这样的设计,可以防止连接杆转动,精准定位,同时也限制连接杆意外弹出。
8.进一步限定,所述外壳开设有若干档位孔,这样的设计,方便使用中更换档位。
9.采用本实用新型的有益效果:
10.1、本实用新型采用调节多个档位滑片可以实现多级调节。
11.2、本实用新型采用按压式推杆,可以实现灵活操作,换挡快捷。
12.3、本实用新型结构简单,制造成本低廉,使用寿命长,方便维修。
附图说明
13.本实用新型可以通过附图给出的非限定性实施例进一步说明;
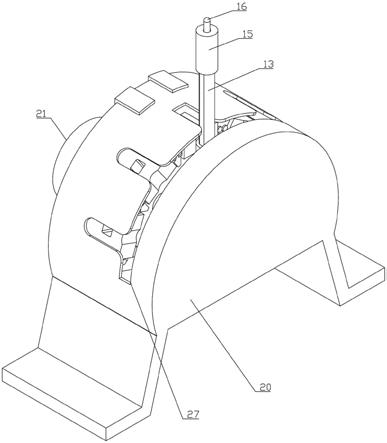
14.图1为本实用新型一种操纵手柄复合动作机械定位机构实施例的第一轴测图;
15.图2为本实用新型一种操纵手柄复合动作机械定位机构实施例的第二轴测图;
16.图3为本实用新型一种操纵手柄复合动作机械定位机构实施例的第一剖面图;
17.图4为本实用新型一种操纵手柄复合动作机械定位机构实施例的第三轴测图;
18.图5为本实用新型一种操纵手柄复合动作机械定位机构实施例的第四轴测图;
19.图6为本实用新型一种操纵手柄复合动作机械定位机构实施例的第五轴测图;
20.图7为本实用新型一种操纵手柄复合动作机械定位机构实施例的第六轴测图;
21.图8为本实用新型一种操纵手柄复合动作机械定位机构实施例的第二剖面图;
22.主要元件符号说明如下:换挡轮盘1、档位滑片2、滑块3、弹簧顶柱4、位移杆5、让位孔6、滑槽7、固定盘8、拉杆9、限位块10、套杆11、第一弹簧12、连接杆13、抓手14、手柄15、推杆16、第二弹簧17、收缩块18、第三弹簧19、外壳20、防尘罩21、抓取孔22、固定凹槽23、限位垫片24、止转面25、止推块26、档位孔27。
具体实施方式
23.为了使本领域的技术人员可以更好地理解本实用新型,下面结合附图和实施例对本实用新型技术方案进一步说明。
24.如图1~8所示,本实用新型的一种操纵手柄复合动作机械定位机构,包括换挡轮盘1,换挡轮盘1安装有若干档位滑片2,档位滑片2两侧一体成型有滑块3,滑块3设置有弹簧顶柱4,档位滑片2前端焊接有位移杆5,换挡轮盘1设置有与弹簧顶柱4匹配的让位孔6,换挡轮盘1设置有与滑块3匹配的滑槽7,位移杆5贯穿于换挡轮盘1,换挡轮盘1套设有固定盘8,固定盘8贯穿连接有拉杆9,拉杆9一端螺纹连接有限位块10,另一端铰接有套杆11,套杆11内安装有第一弹簧12,第一弹簧12连接有连接杆13,连接杆13焊接有抓手14,连接杆13一端螺纹连接有手柄15,手柄15内套设有推杆16,推杆16连接有第二弹簧17,推杆16另一端呈台阶状,头部呈一斜面,推杆16滑动连接有收缩块18,收缩块18固定连接有第三弹簧19,第三弹簧19固定连接在连接杆13,收缩块18设有与推杆16匹配的斜面,推杆16贯穿于连接杆13内部,换挡轮盘1匹配有外壳20,固定盘8匹配有防尘罩21。
25.4、本实施案例中,在使用一种操纵手柄复合动作机械定位机构的时候,首先将档位滑片2安装在换挡轮盘1,再整体安装在固定盘8,随后把收缩块18和第三弹簧19安装在连接杆13内部,再把第二弹簧17套在推杆16上,之后装入连接杆13内部,然后旋入手柄15,随后把第一弹簧17安装在套杆,并把连接杆13整体装入套杆11内,再将拉杆9安装在固定盘8,同时一端旋入限位块10,另一端铰接套杆,最后安装好外壳20和防尘罩21,不工作时,在第一弹簧17的作用下,连接杆13整体整体上升,不与档位滑片2接触,工作时,按下推杆16,收缩块18下移进入让位孔6,此时连接杆13与档位滑片2接触推动档位滑片2前进实现档位工作,需要换挡时松开推杆16,此时连接杆13不与档位滑片2接触,同时将连接杆后移沿着档
位孔27旋转至所需档位,再按下推杆16,此时连接杆13与档位滑片2接触推动档位滑片2前进实现换挡,本实用新型采用调节多个档位滑片可以实现多级调节,采用按压式推杆,可以实现灵活操作,换挡快捷,结构简单,制造成本低廉,使用寿命长,方便维修。
26.优选档位滑片2上开设有抓取孔22和固定凹槽23,这样的设计,方便抓取档位滑片2和定位套杆11,实际上,也可根据具体情况考虑其他抓取、定位方式。
27.优选滑块3末端安装有限位垫片24,这样的设计,防止档位滑片2弹出,造成事故,实际上,也可根据具体情况考虑其他限位方式。
28.优选连接杆13一侧设置有止转面25和止推块26,这样的设计,可以防止连接杆13转动,精准定位,同时也限制连接杆13意外弹出,实际上,也可根据具体情况考虑其他止转和限位方式。
29.优选外壳20开设有若干档位孔27,这样的设计,方便使用中更换档位,实际上,也可根据具体情况考虑其他换挡方式。
30.上述实施例仅示例性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1