一种减震组件的制作方法
1.本实用新型涉及机器人技术领域,特别是涉及一种减震组件。
背景技术:
2.在餐饮服务行业中,智能机器人被应用于餐厅内运送餐品,用以代替人工完成上菜服务。但现实情况下由于某些餐厅地面不平,为了避免送餐移动过程中机器人所运送餐品的洒漏,需要为送餐机器人设置减震结构。
3.现有送餐机器人的减震结构中,大多采用从动轮与主动轮联动的形式,此方式结构复杂,占用空间大,不利于机器人底盘上其他零件的布置。
技术实现要素:
4.为了至少解决上述技术问题之一,本实用新型采用的技术方案是提供一种减震组件,该减震组件具有更好的减震效果、结构简单、连接可靠,占用空间小,方便布置。
5.为了至少实现上述目的之一,本实用新型采用的技术方案为:
6.本实用新型提供一种减震组件,所述减震组件设置在机器人的受力板和固定板之间;所述减震组件包括支撑架,伸缩件和旋转架;所述支撑架的两端分别与所述受力板和固定板固连;所述伸缩件与所述受力板铰接,所述伸缩件的另一端与所述旋转架的一端铰接;所述旋转架的另一端铰接在所述支撑架上。
7.进一步地,所述伸缩件包括弹簧和阻尼。
8.进一步地,所述伸缩件的两端均通过固定座分别与所述受力板和所述旋转架铰接。
9.进一步地,所述旋转架包括旋转本体,所述旋转本体与所述固定座固连,所述旋转本体与所述支撑架铰接。
10.进一步地,所述旋转本体上还设置有铰接孔,所述铰接孔通过销轴与所述支撑架连接。
11.进一步地,还包括万向轮,所述旋转本体的中部还设置有通孔,所述万向轮套设在所述通孔中。
12.进一步地,所述万向轮包括轮体和连接部。
13.进一步地,所述连接部形状适配插入所述通孔中。
14.进一步地,所述支撑架、伸缩件和旋转架组成三角弹性铰接结构。
15.本实用新型提供的一种减震组件与现有技术相比,本实用新型的有益效果在于:
16.本实用新型提供的减震组件,通过支撑架、伸缩件和旋转架组成三角弹性铰接结构,可平衡凹凸不平的路面,具有更好的减震效果;在万向轮上方单独布置减震组件,在保证减震效果的同时,大大减小了悬挂占用的空间;减震组件结构简单、连接可靠,占用空间小,方便布置。
17.总之,本实用新型提出了一种结构简单、连接可靠并能够进行有效减震的减震组
件,其具有广泛的应用前景。
附图说明
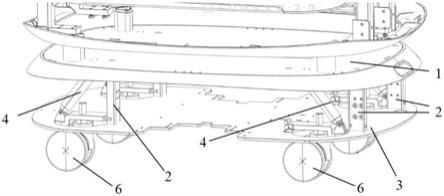
18.图1为本实用新型的送餐机器人底盘的结构示意图;
19.图2为本实用新型的送餐机器人一部分减震组件的结构示意图;
20.图3为本实用新型的送餐机器人一部分减震组件另一视角的结构示意图;
21.图4为本实用新型的送餐机器人另一部分减震组件的结构示意图;
22.图5为本实用新型的送餐机器人另一部分减震组件另一视角的结构示意图;
23.图6为本实用新型的旋转架的结构示意图;
24.图7为本实用新型的万向轮的结构示意图;
25.其中,1受力板,2支撑架,3固定板,4伸缩件,4
‑
1固定座,5旋转架,5
‑
1旋转本体,5
‑
2铰接孔,5
‑
3通孔,6万向轮,6
‑
1轮体,6
‑
2连接部。
具体实施方式
26.为了使本领域技术人员更好地理解本实用新型的技术方案,下面结合具体实施例对本实用新型作进一步的详细说明。请注意,下面描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。实施例中未注明具体技术或条件的,按照本领域内的文献所描述的技术或条件或者按照产品说明书进行。
27.在本实用新型的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
28.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电性连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
29.以下,将通过具体实施例对本实用新型提供的送餐机器人的减震组件作详细说明:
30.如图1
‑
7所示,本实用新型提供的减震组件,包括支撑架2,伸缩件4和旋转架5。上述减震组件设置在送餐机器人的底盘上,具体地,减震组件布置在受力板1和固定板3之间。在所述受力板1的下方通过支撑架2连接有固定板3,所述支撑架2的两端分别与受力板1和固定板3固定连接。
31.伸缩件4的一端通过固定座4
‑
1与受力板1铰接,伸缩件4可绕铰接点转动。伸缩件4的另一端同样通过固定座4
‑
1与旋转架5的俯仰端铰接,伸缩件4同样可绕铰接点转动。伸缩件4由弹簧和阻尼两部分组成,伸缩件4具有很好的减震效果。
32.旋转架5的旋转本体5
‑
1上与俯仰端相对的另一端设置有铰接孔5
‑
2,铰接孔5
‑
2通过销轴与支撑架2连接。旋转架5能够以铰接孔5
‑
2为轴线绕支撑架2转动。旋转架5的中部还设置有通孔5
‑
3,万向轮6套设在所述通孔5
‑
3中。
33.万向轮6包括轮体6
‑
1和连接部6
‑
2。所述连接部6
‑
2为阶梯柱状,所述连接部6
‑
2与所述通孔5
‑
3相适配;通过连接部6
‑
2与通孔5
‑
3的配合,以及支撑架2、伸缩件4和旋转架5的配合,实现万向轮6对整个送餐机器人的承载。
34.本技术提供的减震组件中支撑架2、伸缩件4和旋转架5组成三角弹性铰接结构。由于伸缩件4承受整个机器人的重量,在正常状态下呈现中度压缩状态;当遇见凸起路面时,万向轮6在凸起路面上升起,在万向轮6的作用下,旋转架5上与伸缩件4连接的俯仰端被抬起,伸缩件4受力进一步被压缩;当遇见凹陷路面时,万向轮6在凹陷路面上下降,在万向轮6的作用下,伸缩件4受到旋转架5的压力减小,伸缩件4伸长,从而使旋转架5的俯仰端随着万向轮6俯下。通过支撑架2、伸缩件4和旋转架5组成三角弹性铰接结构,可平衡凹凸不平的路面,实现减震效果。
35.本技术提供的伸缩件4,可一定程度调节弹簧的压缩量,进而调整整个机器人的减震效果。
36.本实用新型提供的一种减震组件与现有技术相比,本实用新型的有益效果在于:
37.本实用新型提供的减震组件,通过支撑架、伸缩件和旋转架组成三角弹性铰接结构,可平衡凹凸不平的路面,具有更好的减震效果;且减震组件结构简单、连接可靠,占用空间小,方便布置。
38.总之,本实用新型提出了一种结构简单、连接可靠并能够进行有效减震的减震组件,其具有广泛的应用前景。
39.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
40.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1