空间站科学手套箱机械臂
1.本实用新型涉及载人航天空间站科学实验设备,特别涉及一种空间站科学手套箱机械臂。
背景技术:
2.空间站的主要用途就是为人类提供一个可长期在轨运行的空间科学实验室。空间站科学手套箱实验柜是空间站众多的科学实验柜之一,旨在为微重力科学实验,如空间材料实验、空间生命科学实验、空间生物实验等提供在轨可操作环境,以实现在空间微重力环境下进行实验操作任务。
3.根据国内外载人航天工程中航天员在轨进行的空间科学实验经验,在航天飞机、空间实验室、空间站等环境下进行生命科学、生物技术、材料科学、航天医学等科学实验时,为保证航天员在舱内的可居住性,相当一部分科学实验的实验场所需要与航天员居住的舱内环境隔离开来,不允许实验产生的物质(气、液、固或其混合物)给航天员的健康带来危害;另一方面,许多科学实验对空气、气流、温度、湿度、光照等环境特征均有一定的要求,在这种情况下,许多科学实验通常是在手套箱内进行。此外,空间站科学手套箱可进行的研究涉及到生物、物理、材料等多个基础学科,这些空间科学实验中,很多实验样品都需要在可控的环境(温度、湿度、照明、通风等)下进行存储和运输,部分科学实验还需要进行精细操作。因此,空间站科学手套箱是一个设计成密闭、环境可控、并可提供空间科学实验所需要的灵巧、精细操作能力的系统。当航天员对手套箱内物体进行操作时,为了保证手套箱的密闭性,需要通过具有隔离功能的手套进行操作,对精细操作难度极大。空间站科学手套箱内属于狭小、非规则空间,目前工业中普遍使用的机械臂,不能直接搬用到空间站科学手套箱内。因此,需要设计一种能适应于手套箱内部空间的特殊构型与尺寸的小型机械臂,以满足在手套箱内部狭小空间内的灵巧作业需求。
技术实现要素:
4.针对上述问题,本实用新型的目的在于提供一种空间站科学手套箱机械臂,以满足空间站科学手套箱特定空间内的灵巧作业任务,自主完成或辅助航天员完成在轨科学实验的精细操作任务。
5.为了实现上述目的,本实用新型采用以下技术方案:
6.一种空间站科学手套箱机械臂,机械臂设置于空间站科学手套箱内,所述机械臂包括依次连接的六个关节及与末端关节连接的末端快速接口,所述六个关节均为转动关节,其中第一关节与空间站科学手套箱的底部连接,且可沿圆弧轨迹转动。
7.所述第一关节包括圆弧导轨、滑块、基座及第一关节转动驱动机构,其中圆弧导轨设置于空间站科学手套箱的底部,基座通过滑块与圆弧导轨滑动连接;第一关节转动驱动机构设置于圆弧导轨和基座之间,用于驱动基座沿圆弧导轨滑动。
8.所述第一关节转动驱动机构包括圆弧齿圈和驱动组件,圆弧齿圈同轴设置于所述
圆弧导轨的下部;
9.驱动组件包括小齿轮、谐波减速器ⅰ、电机支架及电机ⅰ,其中电机支架设置于所述基座上,电机ⅰ设置于电机支架上,且一输出端与谐波减速器ⅰ的输入轴连接;小齿轮连接在谐波减速器ⅰ的输出轴上,且与圆弧齿圈啮合。
10.所述电机ⅰ的另一输出端通过联轴器与多圈绝对值编码器连接,多圈绝对值编码器通过编码器支架支撑,编码器支架与所述电机支架连接。
11.所述第一关节转动驱动机构还包括设置于所述基座上的驱动控制器ⅰ,驱动控制器ⅰ用于控制电机ⅰ。
12.所述机械臂的第二关节设置于基座上,且转动轴线与所述第一关节的转动轴线平行;
13.所述机械臂的第三关节的转动轴线与第二关节的转动轴线垂直;
14.所述机械臂的第四关节和第五关节的转动轴线与第三关节的转动轴线平行;
15.所述机械臂的第六关节的转动轴线与第五关节的转动轴线垂直。
16.所述第三关节通过第一连杆与所述第四关节连接;所述第四关节通过第二连杆与所述第五关节连接。
17.所述第二至第六关节结构相同,均包括电机ⅱ、谐波减速器ⅱ及关节输出端,其中电机ⅱ的一输出轴与谐波减速器ⅱ的输入端连接,谐波减速器ⅱ的输出端与关节输出端连接。
18.所述关节输出端的内侧端固连一中空轴,该中空轴穿过电机ⅱ的中心孔与绝对值编码器ⅱ连接。
19.所述电机ⅱ的外侧设有驱动控制器ⅱ,所述驱动控制器ⅱ用于控制电机ⅱ。
20.本实用新型的优点及有益效果是:
21.本实用新型适用于空间站科学手套箱内部空间的优化构型:空间站科学手套箱内部为非规则、狭窄空间,为实现手套箱内部的全局可达,如果采用现有成熟的机械臂构型,会造成机械臂尺寸过大,导致手套箱内部有用空间变小甚至机械臂自身都无法安装进手套箱内。本实用新型的机械臂构型,能实现以最小的机械臂尺寸达到手套箱内部全局可达的功能,以最大化手套箱内部的有用工作空间。
22.本实用新型更换末端工具更便捷:设置标准化的机械与电气接口,可以实现多样化的末端工具更换,并通过拉拔式快锁机构实现机械臂与末端工作的连接与断开,使航天员在轨单手可操作,大大提高航天员在轨更换机械臂末端工具的效率,减小航天员的劳动强度。
附图说明
23.图1为本实用新型一种空间站科学手套箱机械臂在手套箱内的布局图;
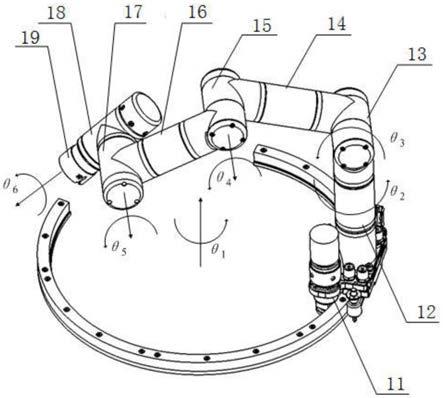
24.图2为本实用新型一种空间站科学手套箱机械臂的结构示意图;
25.图3为本实用新型一种空间站科学手套箱机械臂的第一关节的结构示意图;
26.图4为本实用新型中第一关节的驱动组件的结构示意图;
27.图5为本实用新型中第二关节的结构示意图。
28.图中:1为机械臂,2为空间站科学手套箱,11为第一关节,111为圆弧齿圈,112为圆
弧导轨,113为滑块,114为滑块转接板,115为基座,116为驱动组件,1161为小齿轮,1162为谐波减速器ⅰ,1163为电机支架,1164为电机ⅰ,1165为联轴器,1166为多圈绝对值编码器,1167编码器支架,117为驱动控制器ⅰ,12为第二关节,13为第三关节,14为第一连杆,15为第四关节,16为第二连杆,17为第五关节,18为第六关节,19为末端快速接口,121为电机ⅱ,122为谐波减速器ⅱ,123为交叉滚子轴承,124为绝对值编码器,125为驱动控制器ⅱ,126为关节输出端,θ1、θ2、θ3、θ4、θ5、θ6分别为第一至第六关节的转角。
具体实施方式
29.为了使本实用新型的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本实用新型进行详细描述。
30.如图1
‑
2所示,本实用新型提供的一种空间站科学手套箱机械臂,包括机械臂1,机械臂1设置于空间站科学手套箱2内。机械臂1包括依次连接的六个关节及与末端关节连接的末端快速接口19,六个关节均为转动关节。六个关节依次为第一关节11、第二关节12、第三关节13、第四关节15、第五关节17及第六关节18,其中第一关节11与空间站科学手套箱2的底部连接,且可沿圆弧轨迹转动,末端快速接口19连接在第六关节18的输出端。
31.如图3所示,本实用新型的实施例中,第一关节11包括圆弧导轨112、滑块113、滑块转接板114、基座115及第一关节转动驱动机构,其中圆弧导轨112设置于空间站科学手套箱2的底部,基座115与滑块转接板114连接,滑块转接板114通过滑块113与圆弧导轨112滑动连接;第一关节转动驱动机构设置于圆弧导轨112和基座115之间,用于驱动基座115沿圆弧导轨112滑动。
32.具体地,第一关节转动驱动机构包括圆弧齿圈111和驱动组件116,圆弧齿圈111同轴设置于圆弧导轨112的下部。如图4所示,驱动组件116包括小齿轮1161、谐波减速器ⅰ1162、电机支架1163及电机ⅰ1164,其中电机支架1163设置于基座115上,电机ⅰ1164设置于电机支架1163上,且一输出端与谐波减速器ⅰ1162的输入轴连接;小齿轮1161连接在谐波减速器ⅰ1162的输出轴上,且与圆弧齿圈111啮合。电机ⅰ1164经过谐波减速器ⅰ1162驱动小齿轮1161转动,因小齿轮1161与圆弧齿圈111形成齿轮运动副,所以小齿轮1161在圆弧齿圈111上滚动,从而带动基座115沿圆弧导轨112滑动,从而实现第一关节11的运动。
33.在上述实施例的基础上,进一步地,在电机ⅰ1164的另一输出端通过联轴器1165与多圈绝对值编码器1166连接,多圈绝对值编码器1166通过编码器支架1167支撑,编码器支架1167与电机支架1163连接。多圈绝对值编码器1166用于反馈第一关节11的位置。
34.在上述实施例的基础上,第一关节转动驱动机构还包括设置于基座115上的驱动控制器ⅰ117,驱动控制器ⅰ117用于控制电机ⅰ1164。
35.如图2所示,本实用新型的实施例中,机械臂1的六个关节的布置方式是:第二关节12设置于第一关节11的基座115上,且转动轴线与第一关节11的转动轴线平行;第三关节13的转动轴线与第二关节12的转动轴线垂直;第四关节15和第五关节17的转动轴线与第三关节13的转动轴线平行;第六关节18的转动轴线与第五关节17的转动轴线垂直。
36.进一步地,第三关节13通过第一连杆14与第四关节15连接;第四关节15通过第二连杆16与第五关节17连接。第一连杆14与第二连杆16均是用于连接相邻的两个关节,使机械臂满足操作空间的要求,即实现手套箱内部全局可达。
37.如图5所示,本实用新型的实施例中,六个关节中的第二至第六关节均采用模块化,且结构相同,均包括电机ⅱ121、谐波减速器ⅱ122及关节输出端126,其中电机ⅱ121的一输出轴与谐波减速器ⅱ122的输入轴连接,谐波减速器ⅱ122的输出轴与关节输出端126连接,关节输出端126通过交叉滚子轴承123支撑。电机ⅱ121经过谐波减速器ⅱ122减速后带动关节输出端126运动,从而实现第二至第六关节的运动。
38.在上述实施例的基础上,进一步地,在输出端126的内侧端固连一中空轴,该中空轴穿过电机ⅱ121的中心孔与绝对值编码器ⅱ124连接,绝对值编码器ⅱ124用于反馈第二至第六关节的位置。电机ⅱ121的外侧设有驱动控制器ⅱ125,驱动控制器ⅱ125用于控制电机ⅱ121。
39.本实用新型的实施例中,机械臂1的六个关节组成均是转动关节,组成6r的关节配置形式,其关节变量分别为角度θ1、θ2、θ3、θ4、θ5及θ6。各关节的结构设计中采用中空走线,机械臂1的线缆从各关节中心孔中穿过,可以实现
±
180
°
回转运动。
40.本实用新型的实施例中,第一关节11提供回转运动,实现机械臂1在空间站科学手套箱2内的大范围可达。空间站科学手套箱2的内部为非规则几何空间,如果采用传统的旋转关节设计方式,为实现全局可达,机械臂臂杆将设计得非常长,会导致机械臂刚度低、受载变形大。因此,第一关节11采用圆弧导轨112与圆弧齿圈111的支撑和驱动设计方式,可以在实现大范围可达的同时,使结构实现轻量化、高刚度化。
41.第二关节12、第三关节13、第四关节15、第五关节17及第六关节18为模块化关节,均提供回转运动,设计原理相同,均是采用电机、谐波减速器加高精度绝对值编码器反馈的方式。此五个关节与第一关节11形成串联形式的六自由度的运动机构,实现机械臂末端的三个位置与三个姿态的调节。第一至第六关节均将关节控制器置于关节内部,实现了结构上的美观化与紧凑化设计,并同时实现中空走线,提高了系统的可靠性。
42.本实用新型的实施例中,末端快速接口19为手套箱机械臂提供标准化的机械与电气接口,可实现机械臂末端与不同执行器快速化的连接与断开,可适配不同种类的末端执行器,极大降低航天员在轨更换末端执行器的劳动强度。末端执行器上设置公头,机械臂末端设置母头,当将公头插入母头时,通过弹簧压缩母头端的钢球嵌入公头端的沟槽内,实现快速连接锁紧。当需要断开连接时,拉动压紧钢球的结构往压紧弹簧的方向运动,释放对钢球的压力,可以将公头从母头中快速拔出,实现末端执行器与机械臂的快速断开。在公头与母头中间分别布置电连接器插针端与插孔端,在机械连、断的同时实现电气的连、断。
43.本实用新型的控制系统分为下层的关节驱动控制器与上层的系统控制器,关节驱动控制器均放置于关节内部。关节驱动控制器的作用是接受上层的系统控制器下发的运动指令,驱动关节运动,并向系统控制器反馈关节参数,包括关节电流、位置与速度等参数。系统控制器实现机械臂的运动规划、参数采集与监控,以及与更上一层控制器的交互通讯。系统控制器与各关节驱动控制器之间通过总线进行通讯,各关节驱动控制器均串联连接于总线上,实现线缆的最精简化设计与布置。
44.本实用新型提出的一种空间站科学手套箱机械臂,适用于复杂狭窄空间的特殊构型的机械臂,不但解决了传统工业机械臂受限于重量、体积难以用于空间站科学手套箱的问题,而且提供了适用于多种末端执行器的标准化快换接口,极大地方便了航天员在轨操作的便利性。该机械臂能实现六自由度操作任务,以辅助航天员完成精细操作或自主完成
精细操作,可极大地降低航天员在轨操作精细任务的劳动强度,并提高其任务成功率。
45.以上所述仅为本实用新型的实施方式,并非用于限定本实用新型的保护范围。凡在本实用新型的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1