稳定性好的钢缆轨道机器人的制作方法
1.本技术涉及机器人的领域,尤其是涉及稳定性好的钢缆轨道机器人。
背景技术:
2.钢缆机器人的研究起源于模仿人类在进行走钢丝运动时的运动,具有的特点为静态的不稳定和动态的稳定性的,基于钢缆及其人在不同领域的应用可以进行线路巡视、线路维修以及线路除冰等功能。
3.在公告号cn204173036u的中国实用新型中公开了钢丝缆绳爬行机器人,其技术要点是:一种钢丝缆绳爬行机器人,由爬行装置、夹紧装置、机架等部分构成,并通过爬行装置和夹紧装置的配合运动实现在钢丝缆绳上爬行。爬行机构包括主动连杆、从动连杆、前机架、后机架等组件;夹紧装置包括牵引电磁铁,主动夹紧块,固定夹紧块,弹簧等组件。
4.针对上述中的相关技术,发明人认为钢丝属于柔性材质,现有技术中的钢丝机器人在钢缆上进行爬行时,机架会发生摇晃,导致这题机构的稳定性不足。
技术实现要素:
5.为了提高机器人的整体稳定性,本技术提供稳定性好的钢缆轨道机器人。
6.本技术提供的稳定性好的钢缆轨道机器人采用如下的技术方案:
7.稳定性好的钢缆轨道机器人,包括机架,机架上设置有驱动装置,驱动装置能够驱动机架在钢缆上移动,机架中线位置转动连接有飞轮,机架对应飞轮的位置固接有飞轮电机,飞轮与飞轮电机的输出轴固接,飞轮外罩设有飞轮罩。
8.通过采用上述技术方案,首先通过驱动装置钢缆上沿钢缆的长度方向移动,带动机架在钢缆上进行运动,通过飞轮的转动提高整体机构的整体稳定性,飞轮罩罩设于飞轮外保证机构的整体稳定以及安全性。
9.可选的,驱动装置包括水平设置于机架上侧的驱动轴、固接于驱动轴中部且与钢缆抵接的钢丝轮,驱动轴的一端设置有能够驱动驱动轴转动的驱动组件,驱动轴的另一端设置有能够随驱动组件转动的配重轮,驱动轴上固接有与驱动轴同轴线设置的固定板。
10.通过采用上述技术方案,通过驱动组件的转动带动驱动轴从而带动配重轮转动,固定板固接于驱动轴的一端通过固定板的位置对配重轮相对于钢丝轮的位置等距设置,通过配重轮提高整体机构的整体稳定性。
11.可选的,驱动轴上对应固定板的一侧与配重轮过盈连接。
12.通过采用上述技术方案,在配重轮高速转动的时候,使得配重轮相对于驱动轴的相对位置不发生改变。
13.可选的,驱动轴端部螺纹连接有圆环压片,配重轮套设于驱动轴的圆环压片与固定板之间。
14.通过采用上述技术方案,首先将配重轮套设于驱动轴上,通过驱动轴与圆环压片的螺纹连接对配重轮进行压紧,使得配重轮相对于驱动轴的相对位置不发生改变。
15.可选的,固定板靠近配重轮的一侧固接有防滑垫。
16.通过采用上述技术方案,使用防滑垫,在圆环压片对配重轮进行压紧时,通过防滑垫增加配重轮与圆环压片的摩擦系数,防止配重轮相对于驱动轴的转动。
17.可选的,配重轮为空心配重轮,空心配重轮包括过盈连接于驱动轴的轮毂、设置于轮毂外的轮缘,连接轮毂与轮缘之前的连接板。
18.通过采用上述技术方案,空心配重轮整体控制体积更轻,使得轮缘的重量能够远离轴心,使得配重轮的储能密度变大,稳定效果更佳。
19.可选的,机架上设置有套设于配重轮外且设置于机架上表面的遮挡下罩与遮挡上罩。
20.通过采用上述技术方案,罩设于配重轮外的遮挡上罩与遮挡下罩,防止配重轮撞击其他零件,导致机架的损坏。
21.可选的,遮挡上罩与遮挡下罩螺栓连接。
22.通过采用上述技术方案,能通过旋拧螺栓,卸下遮挡上罩,能够对配重轮进行更换,更换配重轮后,拧上螺栓,使遮挡上罩与遮挡下罩罩设于配重轮外。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.首先通过驱动装置钢缆上沿钢缆的长度方向移动,带动机架在钢缆上进行运动,通过飞轮的转动提高整体机构的整体稳定性;
25.2.首先将配重轮套设于驱动轴上,通过驱动轴与圆环压片的螺纹连接对配重轮进行压紧,使得配重轮相对于驱动轴的相对位置不发生改变;
26.3.空心配重轮整体控制体积更轻,使得轮缘的重量能够远离轴心,使得配重轮的储能密度变大,稳定效果更佳。
附图说明
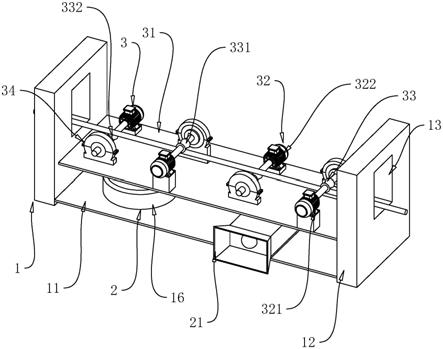
27.图1是稳定性好的钢缆轨道机器人的实施例1的整体示意图。
28.图2是稳定性好的钢缆轨道机器人的实施例1的剖面示意图。
29.图3是稳定性好的钢缆轨道机器人的实施例1的防护组件爆炸图。
30.图4是稳定性好的钢缆轨道机器人的实施例2的防护组件爆炸图。
31.图5是稳定性好的钢缆轨道机器人的实施例3的空心配重轮示意图。
32.附图标记说明:1、机架;11、底板;12、支撑板;13、通槽;14、飞轮;15、飞轮电机;16、飞轮罩;2、监控装置;21、监控器;3、驱动装置;31、承接板;32、驱动组件;321、上驱动电机;322、下驱动电机;33、驱动轴;331、钢丝轮;34、平衡组件;341、配重轮;342、固定板;35、防护组件;351、遮挡下罩;352、遮挡上罩;36、圆环压片;37、防滑垫;38、空心配重轮;381、轮毂;382、轮缘;383、连接板。
具体实施方式
33.以下结合附图1
‑
5对本技术作进一步详细说明。
34.实施例1:
35.本技术实施例公开稳定性好的钢缆轨道机器人。
36.参照图1和图2,稳定性好的钢缆轨道机器人包括机架1,机架1上设置有监控装置2
以及驱动装置3,机架1由底板11和两支撑板12组成,底板11水平设置,底板11呈矩形板状结构,两支撑板12固接于底板11的两端,两支撑板12的中部均开设有钢缆能够通过的通槽13,底板11上转动连接有飞轮14,飞轮14的轴线竖直设置,底板11下对应飞轮14的位置固接有与飞轮14同轴线设置的飞轮电机15,飞轮电机15的输出轴固接于飞轮14,飞轮14外罩设有飞轮罩16。
37.参照图1和图2,监控装置2包括固接于底板11上的监控器21。
38.参照图1和图3,驱动装置3包括承接板31,承接板31水平设置,承接板31呈矩形板状结构,承接板31的长度方向与底板11的长度方向相同,承接板31的两端固接于两支撑板12相互靠近的一侧;承接板12上设置有多个驱动组件32,驱动组件32由上驱动电机321和下驱动电机322组成,上驱动电机321和下驱动电机分别沿承接板31的长度方向排列在承接板31两侧,上驱动电机321的输出轴与承接板31的宽度方向相同,下驱动电机322的输出轴与承接板31的宽度方向相同。
39.参照图1和图3,承接板31上对应各驱动组件32的位置均设置有驱动轴33,驱动轴33的轴线方向与承接板31的宽度方向相同,各驱动轴33的一端均连接于对应的驱动组件32。驱动轴33的轴线方向中部固接有与其同轴线设置的钢丝轮331;钢丝轮331的周面开设有弧形环槽。
40.使用时,通过上驱动电机321以及下驱动电机322带动钢丝轮331在钢缆上转动,带动机架1沿底板11的长度方向进行滑移,能够带动监视器21在钢缆上进行滑移,沿钢缆的长度方向进行监视作业,飞轮14通过飞轮电机15转动,提高整体机构的稳定性。
41.参照图1和图3,驱动轴33远离驱动组件32的一端设置有平衡组件34,平衡组件34包括配重轮341、固定板342,固定板342固接于驱动轴33远离驱动组件32的一端,配重轮341连接于驱动轴33对应固定板342远离驱动组件32的一侧。固定板342、配重轮341以及驱动轴33的轴线处于同一直线。配重轮341与驱动轴33的连接方式可以采用过盈配合的固定连接方式,且配重轮341采用实心配重轮,配重轮341的轮缘厚度大于轮毂的厚度。
42.使用时,在驱动电机带动配重轮341进行转动时,能够对旋转的能量进行存储,当机架1运行所遇到尖峰值时,通过配重轮341能减少对驱动组件32的损伤,在配重轮341进行高速转动时,能够使整体机构趋于稳定。
43.参照图1和图3,承接板31对应各平衡组件34的位置均设置有防护组件35,防护组件35包括固接于承接板31上的遮挡下罩351以及设置于遮挡下罩351上侧的遮挡上罩352,遮挡上罩352与遮挡下罩351螺栓连接,驱动轴33设置有配重轮341的一端延伸至遮挡下罩351与遮挡上罩352之间。
44.实施例1的实施原理为:通过上驱动电机321和下驱动电机322分别驱动钢丝轮331在钢缆上转动,实现整体机架1在钢缆上的运行,带动监控器21在钢缆的长度方向进行运动,通过配重轮341和2飞轮14提高整体机架1的整体稳定性。
45.实施例2:
46.参照图4,稳定性好的钢缆轨道机器人,与实施例1不同之处在于:驱动轴33远离驱动组件32的一端开设有外螺纹,配重轮341套设于驱动轴33对应固定板远离驱动组件32的一端, 驱动轴33对应配重轮341远离固定板342的一侧设置有圆环压片36,圆环压片36螺纹连接于驱动轴。为避免配重轮341相对于固定盘转动,固定板342靠近配重轮341的一侧固接
有防滑垫37。
47.实施例2的实施原理为:将配重轮341套设于驱动轴33上,配重轮341通过防滑垫37能够相对于固定板342的相对位置固定,通过驱动轴33与圆环压片36的螺纹连接,对配重轮341进行压紧,当配重轮341损坏,需要更换配重轮341的时候能够旋拧圆环压片36,卸下配重轮341进行更换。
48.实施例3:
49.参照图5,稳定性好的钢缆轨道机器人,与实施例1不同之处在于:配重轮341为空心配重轮38,空心配重轮38包括过盈连接于延长杆343上的轮毂381,均匀固接于轮毂381周面的三个连接板383以及固接于连接板外的轮缘382。
50.实施例3的实施原理为:使用空心配重轮38,能够减少配重轮341的质量,将质量集中至轮缘382位置,能够增加增加配重轮341的储能密度。
51.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1