一种模具机械手动态模拟工作台的制作方法
1.本实用新型涉及工作台技术领域,特别是涉及一种模具机械手动态模拟工作台。
背景技术:
2.对于现有的模具机械手动态模拟工作台,都是按照机械手夹钳和模具量产设备的生产参数提前定制的,导致该模具机械手动态模拟工作台只能运用于单一尺寸的模具,不利于企业生产,严重影响生产效率。
技术实现要素:
3.本实用新型的目的在于避免现有技术中的不足之处而提供一种模具机械手动态模拟工作台,该模具机械手动态模拟工作台具有调节功能,以适用于多种模具,增加企业的生产效率。
4.本实用新型的目的通过以下技术方案实现:
5.提供一种模具机械手动态模拟工作台,包括工作台、传送臂、升降机构、x轴导轨和y轴导轨,所述升降机构的固定端与所述工作台固定,所述升降机构的升降端与所述y轴导轨固定,所述y轴导轨的轨道内安装有滑动部件,所述x轴导轨与所述滑动部件固定,所述传送臂滑动的安装在所述x轴导轨的轨道内。根据现场模具的尺寸,通过升降机构、x轴导轨和y轴导轨来调节滑动部件的位置,实现传送臂在x轴、y轴和z轴方向上的移动,防止传送臂上的模具与其它物体产生干涉,以适用于多种模具,增加企业的生产效率。
6.进一步的,所述y轴导轨的轨道表面沿所述y轴导轨方向开设有多个第一定位孔,所述滑动部件上安装有配合所述第一定位孔的第一定位部件。y轴导轨上的第一定位孔和滑动部件的第一定位部件,用于在滑动部件在y轴方向上的位置确认好后,用于固定滑动部件,防止滑动部件发生滑动,即实现传送臂y轴方向上的定位。
7.进一步的,所述y轴导轨的端点设置有复位点。y轴导轨的端点设置的复位点,可以在该平台完成作业后将滑动部件移动至复位点,方便下次使用。
8.进一步的,所述传送臂的侧面沿所述传送臂方向开设有多个第二定位孔,所述滑动部件上安装有配合所述第二定位孔的第二定位部件。传送臂上的第二定位孔和滑动部件上的第二定位部件,用于在传送臂在x轴方向上的位置确认好后,用于固定传送臂,防止传送臂发生滑动,即实现传送臂x轴方向上的定位。
9.进一步的,所述传送臂的表面沿所述传送臂方向安装有多个夹钳定位部件。夹钳定位部件用于夹钳固定,固定好后的夹钳用于固定模具。
10.进一步的,所述传送臂的侧面沿所述传送臂方向安装有多个夹钳气管,所述夹钳气管安装有夹钳气管开关。夹钳气管用于配合夹钳使用,夹钳气管开关用于控制夹钳气管。
11.进一步的,所述传送臂设置有两个,两个所述传送臂通过拉杆连接为一体。两个传送臂能够更好的固定模具。
12.进一步的,所述升降机构包括中空的立柱、气缸和导柱,所述气缸和所述导柱设置
在所述立柱的内部,所述立柱与所述工作台固定,所述气缸固定在立柱的底部,所述气缸的伸缩端设置有所述导柱,所述导柱与所述y轴导轨固定。通过气缸来控制导柱的升降来完成传送臂z轴方向上的定位。
13.进一步的,所述气缸的伸缩端与所述导柱之间设置有调整块。通过安装不同高度的调整块来实现升降机构的升降行程的调整,使升降机构的升降行程变为可调整,以适应不同的模具。
14.进一步的,所述工作台的两侧固定有多个安全栓,所述工作台表面固定有模具定位部件。安全栓用于工作台内部物件的保护和模具的保护,模具定位部件用于模具定位。
15.本实用新型的有益效果:本实用新型的一种模具机械手动态模拟工作台,该模具机械手动态模拟工作台包括工作台、传送臂、升降机构、x轴导轨和y轴导轨,所述升降机构的固定端与所述工作台固定,所述升降机构的升降端与所述y轴导轨固定,所述y轴导轨的轨道内安装有滑动部件,所述x轴导轨与所述滑动部件固定,所述传送臂滑动的安装在所述x轴导轨的轨道内。根据现场模具的尺寸,通过升降机构、x轴导轨和y轴导轨来调节滑动部件的位置,实现传送臂在x轴、y轴和z轴方向上的移动,防止传送臂上的模具与其它物体产生干涉,以适用于多种模具,增加企业的生产效率。
附图说明
16.利用附图对实用新型作进一步说明,但附图中的实施例不构成对本实用新型的任何限制,对于本领域的普通技术人员,在不付出创造性劳动的前提下,还可以根据以下附图获得其它的附图。
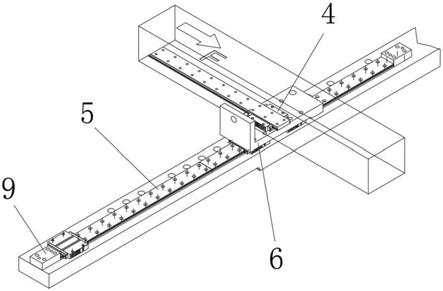
17.图1是本实用新型的一种模具机械手动态模拟工作台的整体结构示意图。
18.图2是本实用新型的一种模具机械手动态模拟工作台的侧视图。
19.图3是图1中a部分结构放大图。
20.图4是图1中b部分结构放大图。
21.图5是图2中c部分结构放大图。
22.图6是升降机构结构剖视图。
23.图中包括有:
24.工作台1,传送臂2,升降机构3,x轴导轨4,y轴导轨5,滑动部件6,第一定位孔7,第一定位部件8,复位点9,第二定位孔10,第二定位部件11,夹钳定位部件12,夹钳气管13,夹钳气管开关14,拉杆15,立柱16,气缸17,导柱18,调整块19,安全栓20,模具定位部件21。
具体实施方式
25.结合以下实施例对本实用新型作进一步描述。
26.实施例
27.本实施例的一种模具机械手动态模拟工作台,如图1
‑
6所示,包括工作台1、传送臂2、升降机构3、x轴导轨4和y轴导轨5,所述升降机构3的固定端与所述工作台1固定,所述升降机构3的升降端与所述y轴导轨5固定,所述y轴导轨5的轨道内安装有滑动部件6,所述x轴导轨4与所述滑动部件6固定,所述传送臂2滑动的安装在所述x轴导轨4的轨道内。根据现场模具的尺寸,通过升降机构3、x轴导轨4和y轴导轨5来调节滑动部件6的位置,实现传送臂2
在x轴、y轴和z轴方向上的移动,防止传送臂2上的模具与其它物体产生干涉,以适用于多种模具,增加企业的生产效率。
28.所述y轴导轨5的轨道表面沿所述y轴导轨5方向开设有多个第一定位孔7,所述滑动部件6上安装有配合所述第一定位孔7的第一定位部件8。y轴导轨5上的第一定位孔7和滑动部件6的第一定位部件8,用于在滑动部件6在y轴方向上的位置确认好后,用于固定滑动部件6,防止滑动部件6发生滑动,即实现传送臂2y轴方向上的定位。
29.所述y轴导轨5的端点设置有复位点9。y轴导轨5的端点设置的复位点9,可以在该平台完成作业后将滑动部件6移动至复位点,方便下次使用。
30.所述传送臂2的侧面沿所述传送臂2方向开设有多个第二定位孔10,所述滑动部件6上安装有配合所述第二定位孔10的第二定位部件11。传送臂2上的第二定位孔10和滑动部件6上的第二定位部件11,用于在传送臂2在x轴方向上的位置确认好后,用于固定传送臂2,防止传送臂2发生滑动,即实现传送臂2x轴方向上的定位。
31.所述传送臂2的表面沿所述传送臂方向安装有多个夹钳定位部件12。夹钳定位部件12用于夹钳固定,固定好后的夹钳用于固定模具。
32.所述传送臂2的侧面沿所述传送臂2方向安装有多个夹钳气管13,所述夹钳气管13安装有夹钳气管开关14。夹钳气管13用于配合夹钳使用,夹钳气管开关14用于控制夹钳气管13。
33.所述传送臂2设置有两个,两个所述传送臂2通过拉杆15连接为一体。两个传送臂2能够更好的固定模具。
34.所述升降机构2包括中空的立柱16、气缸17和导柱18,所述气缸17和所述导柱18设置在所述立柱16的内部,所述立柱16与所述工作台1固定,所述气缸17固定在立柱16的底部,所述气缸17的伸缩端设置有所述导柱18,所述导柱18与所述y轴导轨5固定。通过气缸17来控制导柱18的升降来完成传送臂2z轴方向上的定位。
35.所述气缸17的伸缩端与所述导柱18之间设置有调整块19。通过安装不同高度的调整块19来实现升降机构2的升降行程的调整,使升降机构2的升降行程变为可调整,以适应不同的模具。
36.所述工作台1的两侧固定有多个安全栓20,所述工作台1表面固定有模具定位部件21。安全栓20用于工作台1内部物件的保护和模具的保护,模具定位部件21用于模具定位。
37.最后应当说明的是,以上实施例仅用以说明本实用新型的技术方案,而非对本实用新型保护范围的限制,尽管参照较佳实施例对本实用新型作了详细地说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1