城市多功能下水道勘探机器人
1.本实用新型涉及下水道技术领域,尤其涉及城市多功能下水道勘探机器人。
背景技术:
2.下水道是一种城市公共设施,指建筑物排放污水和雨水的管道;也指城市、厂区或村庄排除污水和雨水的地下通道。
3.当今社会下水管道工人仍然是人们避之不及的工作,据调查由于下水道中缺少氧气、充斥毒气、视野狭隘、易得慢性病、脏且累,对下水道工人造成严重的安全隐患,从而设计出下水道勘测机器人,现有的下水道勘测机器人,在进行移动时,由于下水道管道内部错综复杂,从而造成其移动时的稳定性较差,因此,亟需设计一种城市多功能下水道勘探机器人来解决上述问题。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的城市多功能下水道勘探机器人。其优点在于机器人移动时的稳定性较强。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.城市多功能下水道勘探机器人,包括支撑板,所述支撑板的顶部设置有机械臂机构,且机械臂机构的一侧设置有机械爪机构,所述支撑板的另一侧固定连接有传感器安装板,所述支撑板的底部两端均固定设置有转动轮安装架,且转动轮安装架的一端转动连接有转动轮,所述支撑板的顶部两端均固定连接有主动轮安装架,且主动轮安装架的一端转动连接有主动轮,位于同一端的两个转动轮和主动轮的外壁套接有同一个履带,所述支撑板的顶部两端均固定连接有直流电机,且直流电机的输出轴与主动轮固定连接。
7.通过以上技术方案:通过中间一个悬空的主动轮带动两个转动轮旋转,从而带动机器人在下水道内移动,利用主动轮使其与两个转动轮形成三角形,达到稳定的结构,来协助通过复杂地形,保持机器人更稳定的运行,三角形履带在管道内壁环境中,增大与管道接触面的面积,可提高摩擦力;在运动过程中更稳定、更容易保持平衡,防止机器人发生侧翻,同时更容易攻克道路上的障碍。
8.本实用新型进一步设置为,所述机械臂机构包括固定板,固定板与传感器安装板固定连接,所述固定板的一侧顶部和底部均固定连接有两个限位柱,位于顶部的所述固定板的一侧设置有齿条,且齿条与顶部两个限位柱之间滑动设置,位于底部的所述固定板的一侧固定连接有连接板,且连接板位于底部两个限位柱之间,所述连接板的一侧与支撑板的顶部固定连接,位于底部的两个所述限位柱的顶部均固定连接有齿轮安装板,且其中一个齿轮安装板的一侧固定连接有第三舵机,所述第三舵机延伸到两个齿轮安装板之间的输出轴固定连接有齿轮,且齿轮与齿条相啮合。
9.通过以上技术方案:在对下水道内杂物进行清理时,通过第三舵机带动齿轮旋转,进而在限位柱的限位作用下带动齿条移动,可以为机械爪提供一个较为强大的动力,如果
管道前方存在柔软、易碎的障碍物时,齿条带动机械爪也可以起到简易的破壁作用。
10.本实用新型进一步设置为,所述机械爪机构包括第一舵机,且第一舵机的外壁设置有舵机安装壳,所述舵机安装壳的另一侧外壁与齿条的一侧固定连接,所述第一舵机延伸到舵机安装壳顶部外壁的输出轴固定连接有转动盘,且转动盘的顶部转动连接有两个连接杆,两个所述连接杆的一侧均转动连接有机械爪安装架,且两个机械爪安装架呈折型设置,两个机械爪安装架的折口呈相反设置,两个所述舵机安装壳的一侧外壁固定连接有固定杆,且固定杆的顶部一侧位置转动连接有转动轴,所述转动轴穿过两个机械爪安装架折角处,且转动轴与两个机械爪安装架之间转动设置,所述机械爪安装架的顶部和底部均固定连接有两个连接柱,且位于顶部的两个连接柱的顶部和位于底部的两个连接柱的底部均固定连接有机械爪。
11.通过以上技术方案:利用第一舵机转动带动转动盘旋转,从而带动两个机械爪安装架闭合,利用机械爪对管道内的杂物进行抓取,反向旋转第一舵机即可将杂物投入储物篮内,达到便于清理下水管道内部杂物的目的。
12.本实用新型进一步设置为,所述支撑板的一侧固定连接有储物篮。
13.通过以上技术方案:利用储物篮对管道内的杂物进行储存,防止杂物对下水管道的疏通造成影响。
14.本实用新型进一步设置为,所述储物篮的底部转动设置有万向轮。
15.通过以上技术方案:利用设置有万向轮,使小车整体稳定性好,通过在储物篮下装设一个万向轮,能够有效的防止机器人在行进过程中卡死,提高了运行效率。
16.本实用新型进一步设置为,所述支撑板的一侧中部固定连接有第二舵机,且第二舵机的输出轴固定连接有摄像头,所述支撑板的顶部固定设置有无线数据传输器。
17.通过以上技术方案:利用摄像头对下水管道内的情况进行录制,随后利用无线数据传输器将视频传输至工作人员,便于工作人员对机器人进行控制。
18.本实用新型进一步设置为,所述传感器安装板的一侧固定连接有检测机构,且检测机构包括温湿度传感器、甲烷传感器和一氧化碳传感器。
19.通过以上技术方案:利用温湿度传感器、甲烷传感器和一氧化碳传感器检测管道内空气中温湿度、甲烷的浓度和一氧化碳的浓度。
20.本实用新型进一步设置为,所述支撑板的底部固定设置有超声波测距传感器。
21.通过以上技术方案:利用超声波传感器检测下水道污垢的厚度,观察是否需要清理。
22.本实用新型进一步设置为,所述支撑板的底部固定设置有蓝牙。
23.通过以上技术方案:工作人员利用蓝牙与机器人进行连接,便于控制机器人。
24.本实用新型的有益效果为:
25.1、该多功能下水道勘探机器人,通过设置有履带、主动轮、转动轮和直流电机,通过中间一个悬空的主动轮带动两个转动轮旋转,从而带动机器人在下水道内移动,利用主动轮使其与两个转动轮形成三角形,达到稳定的结构,来协助通过复杂地形,保持机器人更稳定的运行,三角形履带在管道内壁环境中,增大与管道接触面的面积,可提高摩擦力;在运动过程中更稳定、更容易保持平衡,防止机器人发生侧翻,同时更容易攻克道路上的障碍。
26.2、该多功能下水道勘探机器人,通过设置有齿条、固定板、限位柱、第三舵机、齿轮、第一舵机、连接杆、机械爪安装架和机械爪,,在对下水道内杂物进行清理时,通过第三舵机带动齿轮旋转,进而在限位柱的限位作用下带动齿条移动,可以为机械爪提供一个较为强大的动力,如果管道前方存在柔软、易碎的障碍物时,齿条带动机械爪也可以起到简易的破壁作用,而后通过第一舵机转动带动转动盘旋转,从而带动两个机械爪安装架闭合,利用机械爪对管道内的杂物进行抓取,反向旋转第一舵机即可将杂物投入储物篮内,达到便于清理下水管道内部杂物的目的。
27.3、该多功能下水道勘探机器人,通过设置有万向轮,使小车整体稳定性好,通过在储物篮下装设一个万向轮,能够有效的防止机器人在行进过程中卡死,提高了运行效率。
附图说明
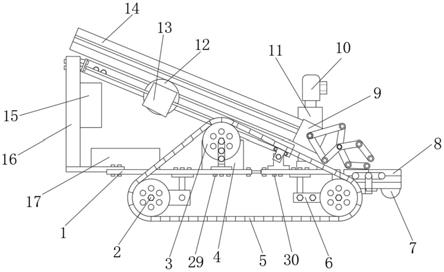
28.图1为本实用新型提出的城市多功能下水道勘探机器人的局部正面结构剖视图;
29.图2为本实用新型提出的城市多功能下水道勘探机器人的凸显齿条和齿轮的立体结构示意图;
30.图3为本实用新型提出的城市多功能下水道勘探机器人的凸显机械爪和第一舵机的立体结构示意图。
31.图中:1、支撑板;2、转动轮;3、主动轮;4、直流电机;5、履带;6、转动轮安装架;7、万向轮;8、储物篮;9、第一舵机;10、摄像头;11、第二舵机;12、齿轮;13、第三舵机;14、齿条;15、检测机构;16、传感器安装板;17、无线数据传输器;18、固定板;19、限位柱;20、齿轮安装板;21、连接板;22、舵机安装壳;23、转动盘;24、连接杆;25、机械爪安装架;26、固定杆;27、转动轴;28、机械爪;29、超声波测距传感器;30、蓝牙。
具体实施方式
32.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
33.下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
34.在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
35.在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
36.参照图1-3,城市多功能下水道勘探机器人,包括支撑板1,支撑板1的顶部设置有机械臂机构,且机械臂机构的一侧设置有机械爪机构,支撑板1的另一侧固定连接有传感器安装板16,支撑板1的底部两端均固定设置有转动轮安装架6,且转动轮安装架6的一端转动连接有转动轮2,支撑板1的顶部两端均固定连接有主动轮安装架,且主动轮安装架的一端
转动连接有主动轮3,位于同一端的两个转动轮2和主动轮3的外壁套接有同一个履带5,支撑板1的顶部两端均固定连接有直流电机4,且直流电机4的输出轴与主动轮3固定连接。
37.具体的,机械臂机构包括固定板18,固定板18与传感器安装板16固定连接,固定板18的一侧顶部和底部均固定连接有两个限位柱19,位于顶部的固定板18的一侧设置有齿条14,且齿条14与顶部两个限位柱19之间滑动设置,位于底部的固定板18的一侧固定连接有连接板21,且连接板21位于底部两个限位柱19之间,连接板21的一侧与支撑板1的顶部固定连接,位于底部的两个限位柱19的顶部均固定连接有齿轮安装板20,且其中一个齿轮安装板20的一侧固定连接有第三舵机13,第三舵机13延伸到两个齿轮安装板20之间的输出轴固定连接有齿轮12,且齿轮12与齿条14相啮合,在对下水道内杂物进行清理时,通过第三舵机13带动齿轮12旋转,进而在限位柱9的限位作用下带动齿条14移动,可以为机械爪28提供一个较为强大的动力,如果管道前方存在柔软、易碎的障碍物时,齿条14带动机械爪28也可以起到简易的破壁作用。
38.具体的,机械爪机构包括第一舵机9,且第一舵机9的外壁设置有舵机安装壳22,舵机安装壳22的另一侧外壁与齿条14的一侧固定连接,第一舵机9延伸到舵机安装壳22顶部外壁的输出轴固定连接有转动盘23,且转动盘23的顶部转动连接有两个连接杆24,两个连接杆24的一侧均转动连接有机械爪安装架25,且两个机械爪安装架25呈折型设置,两个机械爪安装架25的折口呈相反设置,两个舵机安装壳22的一侧外壁固定连接有固定杆26,且固定杆26的顶部一侧位置转动连接有转动轴27,转动轴27穿过两个机械爪安装架25折角处,且转动轴27与两个机械爪安装架25之间转动设置,机械爪安装架25的顶部和底部均固定连接有两个连接柱,且位于顶部的两个连接柱的顶部和位于底部的两个连接柱的底部均固定连接有机械爪28,利用第一舵机9转动带动转动盘23旋转,从而带动两个机械爪安装架25闭合,利用机械爪28对管道内的杂物进行抓取,反向旋转第一舵机9即可将杂物投入储物篮8内,达到便于清理下水管道内部杂物的目的。
39.具体的,支撑板1的一侧固定连接有储物篮8,利用储物篮8对管道内的杂物进行储存,防止杂物对下水管道的疏通造成影响。
40.具体的,储物篮8的底部转动设置有万向轮7,利用设置有万向轮7,使小车整体稳定性好,能够有效的防止机器人在行进过程中卡死,提高了运行效率。
41.具体的,支撑板1的一侧中部固定连接有第二舵机11,且第二舵机11的输出轴固定连接有摄像头10,支撑板1的顶部固定设置有无线数据传输器17,利用摄像头10对下水管道内的情况进行录制,随后利用无线数据传输器17将视频传输至工作人员,便于工作人员对机器人进行控制。
42.具体的,传感器安装板16的一侧固定连接有检测机构15,且检测机构15包括温湿度传感器、甲烷传感器和一氧化碳传感器温湿度传感器、甲烷传感器和一氧化碳传感器,利用温湿度传感器、甲烷传感器和一氧化碳传感器检测管道内空气中温湿度、甲烷的浓度和一氧化碳的浓度。
43.具体的,,所述支撑板1的底部固定设置有超声波测距传感器29,利用超声波传感器29检测下水道污垢的厚度,观察是否需要清理。
44.具体的,支撑板1的底部固定设置有蓝牙30,工作人员利用蓝牙30与机器人进行连接,便于控制机器人。
45.工作原理:在进行工作时,通过中间一个悬空的主动轮3带动两个转动轮2旋转,从而带动机器人在下水道内移动,利用主动轮3使其与两个转动轮2形成三角形,达到稳定的结构,来协助通过复杂地形,保持机器人更稳定的运行,三角形履带5在管道内壁环境中,增大与管道接触面的面积,可提高摩擦力;在运动过程中更稳定、更容易保持平衡,防止机器人发生侧翻,同时更容易攻克道路上的障碍。
46.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1