电动起子装置的制作方法
1.一种电动起子,尤指一种电动起子装置。
背景技术:
2.市面上多数物品都会使用螺丝固定结构,且多数人在锁螺丝时会考虑使用电动起子协助锁付螺丝。随着科技的进步,越来越多的精密仪器需要精准地控制锁付螺丝的力道与时间,以精准掌握锁付螺丝的质量,提高精密仪器的整体精密度。
3.然而,现今多数的电动起子在运转和产生扭力上的控制不够精确,详细来说,多数的电动起子是由用户按压一启动按键而控制转速和产生一固定扭力值,且锁付螺丝到完全超过输出扭力时停止,也就是俗称的死锁时停止。这种锁付方式有可能在螺纹没有完全对齐的情况下伤害到螺丝和螺孔的螺纹,而进一步造成滑牙的情况,而也有可能因为螺丝质量的关系,在螺丝死锁状态下并不能确保一致的锁付质量。
4.另外,使用者按压控制多数电动起子的转速时,无法精准控制转速,而在螺丝快要死锁需要慢慢控制转速和旋转角度时,多数电动起子无法执行精确的动作。
5.举例来说,一个阀门可能有30个螺丝呈一圆形等距围绕分布该阀门的边缘需锁付,以阻止一高压流体的外泄,若这30个螺丝无法以适当且相同的力道与旋转角度锁付,则很可能锁付质量不一而造成该阀门的咬合不一,使该阀门无法阻止该高压流体的外泄。以这个例子来说,30个螺丝以固定扭力的扭力起子手动来锁太费力伤神,而以一般多数的电动起子因无法执行精确的锁付动作,可能会造成上述伤害螺纹、滑牙和死锁时的死锁状态质量不一的问题。
技术实现要素:
6.有鉴于上述问题,本实用新型提供一种电动起子装置及其控制方法,能够精准的控制锁付螺丝的力道与转速以确保螺丝的锁付质量一致。
7.本实用新型的一电动起子装置,包括一电动起子和一控制器。该电动起子电连接该控制器,而该控制器控制该电动起子的运作。
8.该电动起子进一步包括一起子外壳、一转动轴、一启动开关、一马达模块和一感测模块。该起子外壳包括一洞口,而该转动轴设置于该起子外壳内,且该转动轴穿出该洞口。该启动开关设置于该起子外壳上。该马达模块设置于该起子外壳内,且该马达模块驱动该转动轴转动,而该感测模块设置于该起子外壳内以感测该转动轴的一旋转时间、一转速及一扭力,并该感测模块对应对应产生一旋转时间讯号、一转速讯号和一扭力讯号。
9.该控制器进一步包括一控制器外壳、一处理模块和一存储模块。该处理模块设置于该控制器外壳内,并该处理模块电连接该电动起子的该马达模块和该感测模块。其中,该处理模块接收来自该感测模块产生的该旋转时间讯号、该转速讯号和该扭力讯号,且该处理模块根据该扭力讯号计算一扭力值,并该处理模块根据该旋转时间讯号和该转速讯号计算该旋转时间、一转速值和一旋转圈数。该存储模块设置于该控制器外壳内并电连接该处
理模块,且该存储模块储存一设定数据。
10.其中,该处理模块电性连接该启动开关,且当该处理模块侦测该启动开关产生一启动讯号时,该处理模块根据该存储模块中的该设定数据控制该转动轴锁付一螺丝。
11.另外,该处理模块读取该设定数据后控制该马达模块加速至一目标转速,并在该旋转圈数超过该设定数据的一第一圈数时,该处理模块控制该马达模块降速至一第一转速。当该扭力值超过该设定数据的一第一扭力值时,该处理模块根据该设定数据判断锁付该螺丝为硬结合或是软结合。若为硬结合,则该处理模块控制该马达模块再旋转该螺丝一硬结合角度后停止锁付,而若为软结合,则该处理模块控制该马达模块再旋转该螺丝一软结合角度后停止锁付。
12.可选的,该控制器进一步包括:
13.一显示模块,设置于该控制器外壳内并电连接该处理模块,且显示该设定数据和该处理模块计算出的该扭力值、该旋转时间、该转速值和该旋转圈数。
14.可选的,该控制器进一步包括:
15.一显示模块,设置于该控制器外壳内并电连接该处理模块;
16.其中该处理器进一步包括:
17.一异常状况单元;
18.其中,当该异常状况单元判断该旋转圈数未超过该设定数据的该第一圈数,并且该扭力值超过该设定数据的一第二扭力值时,该异常状况单元即产生一异常讯息,并通过该显示模块显示该异常讯息,且停止该旋转轴转动;
19.其中,当该处理模块控制该马达模块降速至该第一转速时,该异常状况单元判断该扭力值是否超过该设定数据的该第二扭力值,且当该异常状况单元判断该扭力值超过该第二扭力值时,该异常状况单元产生该异常讯息,并通过该显示模块显示该异常讯息,且停止该旋转轴转动;
20.其中,当该异常状况单元判断该扭力值未超过该设定数据的该第一扭力值,且该旋转时间超过该设定数据的一第一时间时,该异常状况单元产生该异常讯息,并通过该显示模块显示该异常讯息,且停止该旋转轴转动;和
21.其中,当该异常状况单元判断该扭力值未超过该设定数据的该第一扭力值,且该旋转圈数超过该设定数据的一第二圈数时,该异常状况单元产生该异常讯息,并通过该显示模块显示该异常讯息,且停止该旋转轴转动。
22.可选的,该控制器进一步包括:
23.一显示模块,设置于该控制器外壳内并电连接该处理模块;
24.其中该处理模块进一步包括:
25.一保养时程单元,设有一日期讯息及一保养日期;
26.其中当保养时程单元判断该日期讯息为该保养日期时,该保养时程单元产生一提醒讯息,并通过该显示模块显示。
27.可选的,该处理模块进一步包括:
28.一错误容忍单元,计算该异常讯息的一次数;当该异常讯息的次数超过该设定数据的一错误上限次数时,该错误容忍单元停止该电动起子锁付该螺丝。
29.可选的,该电动起子进一步包括:
30.一数据模块,设置于该起子外壳内,且该数据模块电连接该感测模块和该处理模块;
31.其中,该数据模块接收该感测模块的该旋转时间讯号、该转速讯号和该扭力讯号,且数字化该旋转时间讯号、该扭力讯号和该转速讯号,并将数字化后的该旋转时间讯号、该扭力讯号和该转速讯号输出至该处理模块。
32.本实用新型的一电动起子控制方法,由一电动起子装置的一控制器的一处理模块执行,包括下列步骤:
33.步骤s1,从一存储模块中读取一设定数据。
34.步骤s2,根据该设定数据中的一目标转速讯号控制该电动起子装置的一电动起子的一马达模块的一转速加速至一目标转速。
35.步骤s3,根据来自该感测模块的一旋转时间讯号和一转速讯号,计算一旋转圈数,并判断该旋转圈数是否超过该设定数据中的一第一圈数。
36.步骤s4,当该旋转圈数超过该第一圈数时,根据该设定数据中的一第一转速讯号控制该马达模块的该转速减速至一第一转速;其中该第一转速低于该目标转速。
37.步骤s5,根据来自该感测模块的一扭力值判断该扭力值是否超过该设定数据中的一第一扭力值。
38.步骤s6,当该扭力值超过该第一扭力值时,根据该设定资料判断锁付的一螺丝是硬结合还是软结合。
39.步骤s7,当锁付该螺丝是硬结合时,根据该设定数据中的一硬结合角度控制该电动起子装置的该电动起子的该马达模块再旋转该硬结合角度后,停止锁付该螺丝。
40.步骤s8,当锁付该螺丝是软结合时,根据该设定数据中的一软结合角度控制该电动起子装置的该电动起子的该马达模块再旋转该软结合角度后,停止锁付该螺丝;其中该软结合角度大于该硬结合角度。
41.本实用新型的该处理模块能够根据该设定数据中的该目标转速讯号、该第一圈数、该第一转速讯号、该第一扭力值和硬结合还是软结合的信息控制该转动轴转动以锁付该螺丝。该处理模块进一步根据锁付该螺丝的该扭力值、该旋转时间、该旋转圈数和该转速值精确地控制锁付该螺丝的过程,以数据化的改进锁付螺丝的工艺和加强锁付螺丝的质量管理。
附图说明
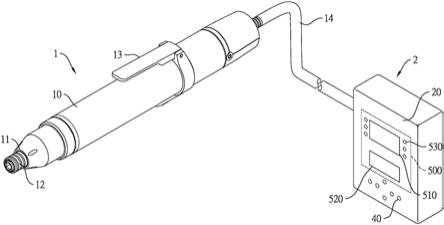
42.图1为本实用新型一电动起子装置一较佳实施例的外观图。
43.图2为本实用新型该电动起子装置该较佳实施例的系统方块图。
44.图3为本实用新型一电动起子控制方法一实施例的流程图。
45.图4为本实用新型该电动起子控制方法一较佳实施例的流程图。
46.主要组件符号说明:
47.1:电动起子
48.2:控制器
49.10:起子外壳
50.11:洞口
51.12:转动轴
52.13:启动开关
53.14:电线
54.20:控制器外壳
55.40:选择按钮
56.100:马达模块
57.200:感测模块
58.300:处理模块
59.310:异常状况单元
60.320:保养时程单元
61.330:错误容忍单元
62.400:存储模块
63.500:显示模块
64.510:扭力值屏幕
65.520:设定屏幕
66.530:状态灯号
67.600:数据模块
68.s1~s55:步骤
具体实施方式
69.以下配合图式及本实用新型的较佳实施例,进一步阐述本实用新型为达成预定实用新型目的所采取的技术手段。
70.本实用新型为一种电动起子装置及其控制方法。
71.请参阅图1所示,本实用新型的一电动起子装置包括一电动起子1和一控制器2。该电动起子1电连接该控制器2,而该控制器2控制该电动起子1的运作。在图1本实用新型该电动起子装置的一较佳实施例中,该电动起子1通过一电线14连接该控制器2。
72.请参一并阅图2所示,该电动起子1进一步包括一起子外壳10、一转动轴 12、一启动开关13、一马达模块100和一感测模块200。该起子外壳10包括一洞口11,而该转动轴12设置于该起子外壳10内,且该转动轴12穿出该洞口 11。
73.该马达模块100设置于该起子外壳10内,且该马达模块100驱动该转动轴12转动,而该感测模块200设置于该起子外壳10内以感测该转动轴12的一旋转时间、一转速和一扭力,并该感测模块200对应该旋转时间、该转速和该扭力分别产生一旋转时间讯号、一转速讯号和一扭力讯号。
74.该控制器2进一步包括一控制器外壳20、一处理模块300和一存储模块 400。该处理模块300设置于该控制器外壳20内。该处理模块300电连接该电动起子1的该马达模块100和该感测模块200,并该处理模块300接收来自该感测模块200产生的该旋转时间讯号、该转速讯号和该扭力讯号。该处理模块300 根据该扭力讯号计算一扭力值,且该处理模块300根据该旋转时间讯号和该转速讯号计算一转速值、一旋转时间和一旋转圈数。该转速值即测量该转速的数值,而该扭力值即测量该扭力的数值。
75.该存储模块400设置于该控制器外壳20内且电连接该处理模块300。该存储模块400储存一设定数据,而该设定数据包括了锁付一螺丝的一行程数据。详细来说,该设定数据的该行程数据为该控制器2的该处理模块300如何控制该马达模块100驱动该转动轴12转动的依据。该行程数据包括了一目标转速讯号、一第一圈数、一第一转速讯号、一第一扭力值和一硬结合还是软结合的信息。这些信息将在说明书后段做探讨。
76.该启动开关13设置于该起子外壳10上且电性连接该处理模块300。当该启动开关13受到外力按压时,该启动开关13产生一启动讯号,而当该处理模块 300侦测到该启动开关13产生该启动讯号时,该处理模块300根据该存储模块 400中的该设定数据控制该转动轴12锁付该螺丝。
77.该处理模块300读取该设定数据后,该处理模块300控制该马达模块100 加速至一目标转速,并在该旋转圈数超过该设定数据的一第一圈数时,该处理模块300控制该马达模块100降速至一第一转速。当该扭力值超过该设定数据的一第一扭力值时,该处理模块300根据该设定数据判断锁付该螺丝为硬结合或是软结合。若为硬结合,则该处理模块300控制该马达模块100再旋转该螺丝一硬结合角度后停止锁付,而若为软结合,则该处理模块300控制该马达模块100再旋转该螺丝一软结合角度后停止锁付。
78.所谓的硬结合和软结合为形容当锁付该螺丝到底时,也就是所谓的当该扭力值超过该设定数据的该第一扭力值时,该螺丝还需要多转多少的角度,使该螺丝能够更紧密的与锁付的一表面结合。当锁付该螺丝到底时,该螺丝对抗锁付该螺丝的反作用力会上升,即该扭力会上升而超过该设定数据的该第一扭力值。而该螺丝还需要多转多少的角度即是指旋转该转动轴12的角度。硬结合指的是当该扭力值超过该设定数据的该第一扭力值时,该螺丝还需要持续转动小于一圈,而软结合指的是当该扭力值超过该设定数据的该第一扭力值时,该螺丝还需要持续转动超过一圈。在本较佳实施例中,该硬结合角度小于该软结合角度。
79.在本实用新型该较佳实施例中,该硬结合角度为约30度角,而该软结合角度为约720度角,也就是说该螺丝软结合时,需要在锁到底后,再转约2圈。
80.另外,在本实用新型该较佳实施例中,该控制器2进一步包括一显示模块 500。该显示模块500设置于该控制器外壳20内并电连接该处理模块300且负责显示该设定数据和该处理模块300的该转速值、该扭力值、该旋转时间和该旋转圈数等数值。
81.如图1所示,在本实用新型该较佳实施例中,该显示模块500包括一扭力值屏幕510、一设定屏幕520和多个状态灯号530。该扭力值屏幕510只负责显示该扭力值,因为锁付该螺丝时该扭力值的实时变化很重要,故该显示模块500 中由该扭力值屏幕510专门负责显示。该些状态灯号530设置于该扭力值屏幕 510的两侧,且该些状态灯号530且负责显示锁付该螺丝的实时状态,例如该转动轴12是否转动、该扭力值是否超出该马达模块100能应付的范围等实时信息。该设定屏幕520负责显示该设定数据,且该设定屏幕520搭配该较佳实施例中该控制器外壳20上的多个选择按钮40接收设定的该设定数据。这些选择按钮40电连接该处理模块300,且这些选择按钮40使该设定屏幕520中显示的该设定数据能被选择和更改。
82.在本实用新型该较佳实施例中,该控制器2进一步包括一数据模块600。该数据模块600设置于该起子外壳10内并电连接该感测模块200和该处理模块 300。该数据模块600
接收该感测模块200的该旋转时间讯号、该转速讯号和该扭力讯号,且该数据模块600分别将该旋转时间讯号、该扭力讯号和该转速讯号数字化,并该数据模块600将数字化后的该旋转时间讯号、该扭力讯号和该转速讯号输出至该处理模块300,以减少该处理模块300处理该扭力讯号和该转速讯号的负担。
83.在本实用新型该较佳实施例中,该马达模块100为一无刷直流马达 (brushless direct ccurrent motor;bldc motor),且该感测模块200包括一定时器、一霍尔效应传感器(hall
‑
effect sensor)和一应变力传感器。该定时器记录该转动轴12的旋转时间,并产生该旋转时间讯号,该应变力传感器用来感测锁付该螺丝的该扭力,并产生该扭力讯号,而该霍尔效应传感器用来感测锁付该螺丝的该转速,并产生该转速讯号。另外,在本实用新型该较佳实施例中,该数据模块600和该感测模块200为一扭力量测装置(torque measuring device;tmd)。
84.另外,该处理模块300除了包括该计时单元310外,在本实用新型该较佳实施例中,该处理模块300进一步包括一异常状况单元310、一保养时程单元 320和一错误容忍单元330。
85.该异常状况单元310于该处理模块300内负责感测锁付该螺丝的一异常状况,并在该异常状况出现时,产生一异常讯息,并通知该处理模块300使该显示模块500显示该异常讯息,且实时停止该转动轴12。详细来说,当该处理模块300在锁付该螺丝时,遇到下列情形该处理模块300的该异常状况单元310 即感测到该异常状况:
86.状况1:当该异常状况单元310判断该旋转圈数未超过该设定数据的该第一圈数,并且该扭力值超过该设定数据的一第二扭力值时,该异常状况单元310 产生该异常讯息,并通过该显示模块500显示该异常讯息,且停止该旋转轴12 转动。
87.状况2:当该处理模块300控制该马达模块100降速至该第一转速,且该异常状况单元310判断该扭力值是否超过该设定数据的该第二扭力值,且当该异常状况单元310判断该扭力值超过该第二扭力值时,该异常状况单元310产生该异常讯息,并通过该显示模块500显示该异常讯息,且停止该旋转轴12转动。
88.状况3:当该异常状况单元310判断该扭力值未超过该设定数据的该第一扭力值,且该旋转时间超过该设定数据的一第一时间时,该异常状况单元310产生该异常讯息,并通过该显示模块500显示该异常讯息,且停止该旋转轴12转动。
89.状况4:当该异常状况单元310判断该扭力值未超过该设定数据的该第一扭力值,且该旋转圈数超过该设定数据的一第二圈数时,该异常状况单元310产生该异常讯息,并通过该显示模块500显示该异常讯息,且停止该旋转轴12转动。
90.上述状况1和状况2的情形为锁付该螺丝时一死锁的状况。该死锁的状况指的是当该螺丝歪斜时锁付因跟一螺孔的一螺纹错位而卡住无法动弹。而上述状况3和状况4的情形为锁付该螺丝时一滑牙的状况。该滑牙的状况指的是当该螺丝的牙无法跟该螺孔的该螺纹结合而空转于该螺孔中。遇到上述状况1至状况4的情形,该异常状况单元310即感测到该异常状况并通过该显示模块500 显示该异常讯息。显示该异常讯息的目的为表示这些状况无法进行锁付流程,因为于该死锁的状况继续锁付会造成该螺纹的损害,而于该滑牙的状况继续锁付会使该螺丝持续空转。在本实用新型该较佳实施例中,该异常讯息即通过该显示模块500的这些状态灯号530对应显示。
91.在本实用新型该较佳实施例中,该错误容忍单元330于该处理模块300内负责统计该异常讯息的一次数,即是当锁付该螺丝出现任何上述的该异常状况时,该错误容忍单元300增加该异常讯息的次数,而当该异常讯息的次数超过该设定数据的一错误上限次数时,该错误容忍单元330停止该电动起子锁付该螺丝。换句话说,当出现该异常状况但是该异常讯息的次数未超过该错误上限次数时,本实用新型还能容忍再次尝试锁付该螺丝的动作,即松开该启动开关 13再重新按压该启动开关13重新尝试锁付该螺丝。该错误容忍单元330在该异常讯息的次数超过该错误上限时停止该电动起子锁付该螺丝时,即便松开该启动开关13在重新按压该启动开关13,也无法再次锁付该螺丝,其意义在于保护该螺丝和该螺纹不受到损害,和保护锁付该螺丝的质量。
92.该保养时程单元320于该处理模块300且设有一日期讯息及该保养日期。当该保养时程单元320判断该日期讯息为该保养日期时,该保养时程单元320 产生一提醒讯息,并通过该显示模块500显示该提醒讯息,用于提醒用户应开始进行保养,以确保本实用新型能持续受到保养而维持正常运作的状态。在本实用新型该较佳实施例中,该提醒讯息即通过该显示模块500的这些状态灯号 530对应显示。
93.请参阅图3所示,一电动起子控制方法,由一电动起子装置的一控制器2 的一处理模块300执行。该电动起子控制方法包括下列步骤:
94.步骤s1,从一存储模块400中读取一设定数据。
95.步骤s2,根据该设定数据中的一目标转速讯号控制该电动起子装置的一电动起子1的一马达模块100的一转速加速至一目标转速。
96.步骤s3,根据来自该感测模块200的一旋转时间讯号和一转速讯号,计算一旋转圈数,并判断该旋转圈数是否超过该设定数据中的一第一圈数。
97.步骤s4,当该旋转圈数超过该第一圈数时,根据该设定数据中的一第一转速讯号控制该马达模块100的该转速减速至一第一转速;其中该第一转速低于该目标转速。
98.步骤s5,根据来自该感测模块200的一扭力值判断该扭力值是否超过该设定数据中的一第一扭力值。
99.步骤s6,当该扭力值超过该第一扭力值时,根据该设定资料判断锁付的一螺丝是硬结合还是软结合。
100.步骤s7,当锁付该螺丝是硬结合时,根据该设定数据中的一硬结合角度控制该电动起子装置的该电动起子1的该马达模块100再旋转该硬结合角度后,停止锁付该螺丝。
101.步骤s8,当锁付该螺丝是软结合时,根据该设定数据中的一软结合角度控制该电动起子装置的该电动起子1的该马达模块100再旋转该软结合角度后,停止锁付该螺丝;其中该软结合角度大于该硬结合角度。
102.也就是说,该存储模块400的该设定数据包括了该目标转速、该第一圈数、该第一转速、该第一扭力值和一硬结合还是软结合的信息。该硬结合还是软结合的信息涵盖在该步骤s6中,而该步骤s6认定若锁付该螺丝不是硬结合即是软结合。毕竟锁付该螺丝时,若不是锁到该扭力值超过该第一扭力值时马上锁不下去的硬结合,通常都会被认定是可以旋转较硬结合多角度的软结合。
103.本实用新型该电动起子控制方法一实施例中,在步骤s5中进一步包括:
104.步骤s51,当该扭力值未超过该第一扭力值时,再进一步判断该旋转圈数是否超过
该设定数据中的一第二圈数;
105.其中,当该扭力值未超过该第一扭力值且该旋转圈数未超过该第二圈数时,执行步骤s5;
106.步骤s52,当该扭力值未超过该第一扭力值且该旋转圈数超过该第二圈数时,停止锁付该螺丝。
107.上述该步骤s51和该步骤s52为确认该螺丝是否出现一滑牙的状况,因为出现该滑牙的状况后,该螺丝会空转而出现该扭力值不变且该旋转圈数会不断上升。遇到此一异常状况时,该处理模块300会停止锁付该螺丝,等待一使用者松开该电动起子1一起子外壳10上的一启动开关13确认该异常状况,并直到该异常状况排除和确认后,该使用者重新按压该启动开关13时,该处理模块 300重新收到该启动开关13的一启动讯号而重新启动锁付该螺丝。
108.另外,在该实施例中,在步骤s3中进一步包括:
109.步骤s31,当该旋转圈数未超过该第一圈数时,再进一步判断该扭力值是否超过该设定数据中的一第二扭力值;其中,该第二扭力值大于该第一扭力值;
110.其中,当该旋转圈数未超过该第一圈数且该扭力值未超过该第二扭力值时,执行s3;
111.步骤s32,当该旋转圈数未超过该第一圈数且该扭力值超过该第二扭力值时,停止锁付该螺丝
112.上述该步骤s31和该步骤s32为确认该螺丝是否出现一死锁的状况,因为出现该死锁的状况后,该螺丝会突然卡死而该扭力值会突然飙升。遇到该异常状况时,该处理模块300同样的会停止锁付该螺丝,以保护该螺丝不受到伤害。
113.请参阅图4所示,在本实用新型该电动起子控制方法一较佳实施例中,在步骤s5中进一步包括:
114.步骤s51’,当该扭力值未超过该第一扭力值时,再进一步根据来自该感测模块的该旋转时间讯号,计算一旋转时间,并判断该旋转时间是否超过该设定数据中的一第一时间;
115.其中,当该扭力值未超过该第一扭力值且该旋转时间未超过该第一时间时,执行步骤s5;
116.步骤s52’,当该扭力值未超过该第一扭力值且该旋转时间超过该第一时间时,停止锁付该螺丝。
117.上述该步骤s51’和该步骤s52’同样为确认该螺丝是否出现该滑牙的状况,因为出现该滑牙的状况后,该螺丝会因空转而造成时间的流逝。遇到该异常状况时,该处理模块300会停止锁付该螺丝以停止该螺丝继续空转而浪费时间。
118.另外,在该较佳实施例中,在步骤s5中进一步包括:
119.步骤s54,当该扭力值超过该第一扭力值时,再进一步判断该扭力值是否超过该设定数据中的一第二扭力值;
120.其中,当该扭力值超过该第一扭力值且该扭力值未超过该第二扭力值时,执行s6;
121.步骤s55,当该扭力值超过该第一扭力值且该扭力值超过该第二扭力值时,停止锁付该螺丝。
122.上述该步骤s54和该步骤s54同样为确认该螺丝是否出现该死锁的状况,因为就算锁付该螺丝的一转速值是较慢的该第一转速而非较快的该目标转速,该扭力值还是有可能因为随时该螺丝歪斜锁付而死锁。有时候死锁是因为该螺丝的一螺纹受损而导致,而该螺纹受损的地方随机,故有可能在快锁付结束时才出现该死锁的状况。
123.本实用新型的该电动起子装置能将锁付该螺丝的各个步骤数据化的以该设定数据的该行程数据呈现出来,并且本实用新型该电动起子装置的该处理模块 300以该设定数据为多个行程的执行基础,改进锁付该螺丝的工艺。本实用新型的该电动起子控制方法中,该处理模块300以上述的该些步骤控制该电动起子装置按照该设定数据精确的锁付该螺丝,使管理该设定数据能加强锁付该螺丝的质量管理。
124.以上所述仅是本实用新型的优选实施例而已,并非对本实用新型做任何形式上的限制,虽然本实用新型已以优选实施例揭露如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案的范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1