一种模块化特种机器人的制作方法
1.本实用新型属于特种机器人技术领域,具体地说,涉及一种模块化特种机器人。
背景技术:
2.传统特种机器人上的功能性针对性强,指定功能的机器人只能在指定的场合上使用,在需要处理不同的情况时,需要购买相应需求功能性的机器人,提高了机器人使用的费用。
3.有鉴于此特提出本实用新型。
技术实现要素:
4.为解决上述技术问题,本实用新型采用技术方案的基本构思是:
5.一种模块化特种机器人,包括安装板及底盘,所述安装板通过第一安装机构安装在底盘上,所述底盘上安装有多个插头,所述底盘上安装有控制器,各个所述插头与控制器之间电性连接,所述安装板上设置有多个安装管,各个所述安装管上通过第二安装机构安装有固定板,所述固定板上安装有云台,所述云台上安装有摄像头,所述固定板上设置有不同使用性能的模块。
6.所述第一安装机构包括开设在安装板上的多个安装孔,所述安装孔上滑动连接有与其相匹配的导向杆或螺纹杆,所述导向杆及螺纹杆的一端固定在底盘上,所述螺纹杆上螺纹连接有螺帽,所述螺帽与安装板的上端面相抵设置。
7.所述第二安装机构包括开设在安装管上的操作腔,所述安装管上开设有多个圆槽,各个所述圆槽与操作腔相通设置,各个所述圆槽上滑动连接有推动杆,所述推动杆的一端位于安装管的内部,所述推动杆的另一端固定有限位板,各个所述推动杆的侧壁上套设有挤压弹簧,所述挤压弹簧的两端分别与安装管及限位板相固定,所述固定板上固定有安装杆,所述安装杆与安装管相互匹配设置,所述安装管的内部设置有便于固定板拆卸的复位组件。
8.所述复位组件包括固定在操作腔内部的复位弹簧,所述安装管上滑动连接有滑动板,所述复位弹簧的另一端与滑动板的下端面相固定,所述滑动板的下端面设置有锥型面,所述锥型面位于各个推动杆的上方。
9.所述锥型面的侧壁上设置有光滑薄膜。
10.所述底盘属于减震四轮底盘。
11.所述底盘属于履带底盘。
12.本实用新型与现有技术相比具有以下有益效果:
13.本实用新型在机器人使用的过程中,根据不同的使用场合及需求,选择相对应模块的固定板,将具有相匹配功能的模块的固定板安装在安装板上,可以根据相对应的场合选择对应需求的模块,便于一个机器人适用更多的不同场合,不再需要购买大量不同功能性的机器人,提高了设备的利用率,降低了使用的成本。
14.本实用新型在将不同的模块安装在安装板上时,将固定板上的安装杆放置在安装管上的滑动板上,推动杆在挤压弹簧的作用下进行复位并与安装杆相抵,实现安装杆上固定板的固定,需要将固定板更换时,将各个推动杆进行拉动,使推动杆不再与安装杆相抵,将固定板进行拉动,通过复位弹簧对滑动板的推动,更加便于固定板的拆解,整个不同模块的安装及拆解操作简单、实施方便,更加便于机器人更换不同功能性的模块。
15.下面结合附图对本实用新型的具体实施方式作进一步详细的描述。
附图说明
16.在附图中:
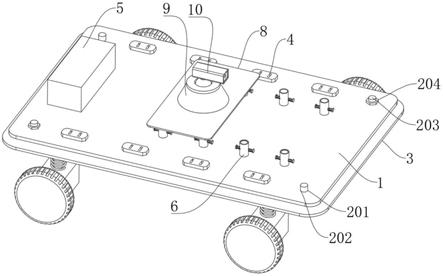
17.图1为本实用新型的立体结构示意图;
18.图2为本实用新型的第二安装机构示意图;
19.图3为本实用新型的第二安装机构内部结构示意图;
20.图4为图2中a处的放大图;
21.图5为图3中b处的放大图;
22.图6为本实用新型的底盘结构示意图。
23.图中:1、安装板;2、第一安装机构;201、安装孔;202、导向杆;203、螺纹杆;204、螺帽;3、底盘;4、插头;5、控制器;6、安装管;7、第二安装机构;701、操作腔;702、复位弹簧;703、滑动板;704、锥型面;705、圆槽;706、推动杆;707、挤压弹簧;708、限位板;709、安装杆;8、固定板;9、云台;10、摄像头。
具体实施方式
24.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对实施例中的技术方案进行清楚、完整地描述,以下实施例用于说明本实用新型。
25.如图1至图6所示,一种模块化特种机器人,包括安装板1及底盘3,安装板1通过第一安装机构2安装在底盘3上,底盘3上安装有多个插头4,底盘3 上安装有控制器5,各个插头4与控制器5之间电性连接,安装板1上设置有多个安装管6,各个安装管6上通过第二安装机构7安装有固定板8,固定板8上安装有云台9,云台9上安装有摄像头10,固定板8上设置有不同使用性能的模块,模块包括巡逻模块、高压水枪灭火模块、高压喷泡灭火模块及排爆模块,在选择巡逻模块时,通过云台9上的摄像头10,在居民小区、化工厂、制造厂等区域巡逻,通过摄像头10进行远程图像传输;在选择高压水枪灭火模块时,通过云台9上的摄像头10对火灾情况进行识别,通过高压水枪,可以对距离较远、楼层较高的情况进行灭火操作;在选择高压喷泡灭火模块时,通过云台9上的摄像头10对火灾情况进行识别,可以扑灭汽油,柴油等油性初期灭火,且高压灭火模块上的红外热成像可通过对火灾热源监测,实现有目标的快速灭火,当检测到机器人机身较热的情况下,还会自动打开自动降温阀门,进行机器身体的降温;当选择排爆模块时,可以通过高精度遥控机械手,通过云台9上的摄像头10,对目标可疑问题进行检查排爆,排爆模块上配有工具箱,可以随时切换工具,进行排爆。
26.第一安装机构2包括开设在安装板1上的多个安装孔201,安装孔201上滑动连接有与其相匹配的导向杆202或螺纹杆203,导向杆202及螺纹杆203的一端固定在底盘3上,螺纹
杆203上螺纹连接有螺帽204,螺帽204与安装板1的上端面相抵设置,需要更换不同的底盘3时,将螺帽204进行转动,使其从螺纹杆203上拆解下,将安装板1从底盘3上取下,再通过安装孔201及导向杆202 的作用,将安装板1放置在更换后的底盘3上,再将螺帽204螺纹转动连接在螺纹杆203上,使螺帽204与安装板1相抵,完成底盘3的更换。
27.第二安装机构7包括开设在安装管6上的操作腔701,安装管6上开设有多个圆槽705,各个圆槽705与操作腔701相通设置,各个圆槽705上滑动连接有推动杆706,推动杆706的一端位于安装管6的内部,推动杆706的另一端固定有限位板708,各个推动杆706的侧壁上套设有挤压弹簧707,挤压弹簧707的两端分别与安装管6及限位板708相固定,固定板8上固定有安装杆709,安装杆709与安装管6相互匹配设置,安装管6的内部设置有便于固定板8拆卸的复位组件,在将不同的模块安装在安装板1上时,将固定板8上的安装杆709放置在安装管6上的滑动板703上,挤压弹簧707受力拉伸,当滑动板703及锥型面 704不再与推动杆706相抵时,推动杆706在挤压弹簧707的作用下进行复位并与安装杆709相抵,实现安装杆709上固定板8的固定。
28.复位组件包括固定在操作腔701内部的复位弹簧702,安装管6上滑动连接有滑动板703,复位弹簧702的另一端与滑动板703的下端面相固定,滑动板703 的下端面设置有锥型面704,锥型面704位于各个推动杆706的上方,需要将固定板8更换时,将各个推动杆706进行拉动,使推动杆706不再与安装杆709相抵,将固定板8进行拉动,使安装杆709在安装管6内部滑动,通过复位弹簧 702对滑动板703的推动,更加便于固定板8的拆解。
29.锥型面704的侧壁上设置有光滑薄膜,通过光滑薄膜,降低摩擦力,提高锥型面704与各个推动杆706之间的传动效率。
30.底盘3属于减震四轮底盘,减震四轮底盘更加适用于混凝土、水泥、沥青等路面的居民小区、工厂厂区内。
31.底盘3属于履带底盘,履带底盘适用于地形复杂的情况,可以翻越石块,沙地,草地,等特殊地形。
32.在机器人使用的过程中,根据不同的使用场合及需求,选择相对应模块的固定板8,将具有相匹配功能的模块的固定板8安装在安装板1上,使机器人使用更加的模块化,可以根据相对应的场合选择对应需求的模块,便于机器人适用更多的不同场合,且使用的过程中,只需更换不同功能性的模块,便可以进行不同要求的实施操作,不再需要购买大量不同功能性的机器人,提高了设备的利用率,降低了使用的成本;
33.在将不同的模块安装在安装板1上时,将固定板8上的安装杆709放置在安装管6上的滑动板703上,在固定板8及模块自身的重力作用下,推动滑动板 703在安装管6的内部进行滑动,在滑动板703滑动的过程中,复位弹簧702受力压缩,滑动板703上的锥型面704随着滑动板703的滑动,与各个圆槽705上的推动杆706相抵,在力的作用下推动各个推动杆706进行滑动,此时挤压弹簧 707受力拉伸,当滑动板703及锥型面704不再与推动杆706相抵时,推动杆706 在挤压弹簧707的作用下进行复位并与安装杆709相抵,实现安装杆709上固定板8的固定,需要将固定板8更换时,将各个推动杆706进行拉动,使推动杆 706不再与安装杆709相抵,将固定板8进行拉动,使安装杆709在安装管6内部滑动,通过复位弹簧702对滑动板703的推动,更加便于固定板8的拆解,整个不同模块的安装及拆解操作简单、实施方便,更加便于机器人更换不同功能性的模块。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1