一种用于取放图书的机械手力臂机构
1.本实用新型涉及图书馆自动化设备技术,更具体地说,它涉及一种用于取放图书的机械手力臂机构。
背景技术:
2.图书馆,是搜集、整理、收藏图书资料以供人阅览、参考的机构,早在公元前3000年就出现了图书馆,图书馆有保存人类文化遗产、开发信息资源、参与社会教育等职能。
3.无论是学校还是公众场所均存在图书馆这一设施,在图书馆中往往需要通过图书管理员来对图书馆中的书籍进行取放的工作,而这一工作基本通过图书管理员人为的动作来实现,对于一些身高有所欠缺的图书管理员往往需要通过梯子或者垫高台来爬高进行取放书籍的工作,而这一动作容易在人们站不稳时发生意外,而目前人们往往会设计一些机械臂进行图书的放置,但是其无法仅仅适配某一结构,例如书架或者推车,从而使得其使用范围较为狭隘。
4.因此需要提出一种新的方案来解决这个问题。
技术实现要素:
5.针对现有技术存在的不足,本实用新型的目的在于提供一种用于取放图书的机械手力臂机构,能够实现对于书架以及推车的装配,具有较好的使用范围。
6.本实用新型的上述技术目的是通过以下技术方案得以实现的:一种用于取放图书的机械手力臂机构,包括横向调节机构以及设置在横向调节机构活动端上的机械臂,所述横向调节机构上设置有夹紧组件,所述夹紧组件具有两个相对且相向位移的夹持端,且两个所述夹持端于其位移轨迹上任意位置定位。
7.通过采用上述技术方案,当人们需要使用本机械手臂的时候,人们能够通过夹紧组件将其设置在书柜或者推车宽度方向上的外侧,而后通过夹紧组件的夹持端来进行调整,令夹持端能够在其位移轨迹上发生横向位移,从而调整两侧夹持端之间的间距来对书柜或者推车在其宽度方向上进行夹紧,使得本机械手臂得以适配不同的情况,具有较好的实用性能。
8.本实用新型进一步设置为:所述夹紧组件包括固定连接在横向调节机构两端的侧板以及贯穿侧板且与其螺纹连接的螺杆,所述螺杆转动连接有位于两块侧板之间的夹板,所述夹板的转动轴线与螺杆的转动轴线相同。
9.本实用新型进一步设置为:所述螺杆远离夹板的一端固定连接有偏心设置的偏心块,所述偏心块转动连接有伸缩握把,所述伸缩握把的伸缩端通过偏心块自侧板向外偏转。
10.本实用新型进一步设置为:所述伸缩握把于其长度变化方向上任意位置维持不变。
11.本实用新型进一步设置为:所述伸缩握把包括与偏心块转动连接的前握把以及与其螺纹连接的后握把,所述伸缩握把的最大长度小于等于螺杆与侧板的厚度差。
12.本实用新型进一步设置为:所述前握把远离偏心块的一端开设有螺纹孔,所述后握把固定连接有螺纹杆,所述后握把与前握把通过螺纹孔与螺纹杆螺纹连接。
13.本实用新型进一步设置为:所述夹板远离侧板的一侧固定连接有软性垫一。
14.通过采用上述技术方案,通过设置软性垫一,从而使得在夹板与书柜或者书架固定的时候,不会令夹板将书柜或者书架夹伤。
15.本实用新型进一步设置为:所述软性垫一上开设有若干防滑槽一。
16.通过采用上述技术方案,通过设置防滑槽一,从而使得其能够通过增大其粗糙度和摩擦系数的方式来增大夹板与物体接触时候的摩擦力。
17.本实用新型进一步设置为:所述后握把远离前握把的一端固定连接有软性垫二。
18.通过采用上述技术方案,由于后握把远离前握把的一端固定连接有软性垫二,从而使得后握把与侧板抵触的时候,能够通过软性垫二来进行缓冲,并且还能够使得软性垫二得以释放弹性势能以通过伸缩握把和偏心块来拉动螺杆。
19.本实用新型进一步设置为:所述软性垫二上开设有若干防滑槽二。
20.通过采用上述技术方案,通过开设防滑槽二,从而使得软性垫二能够通过增大其粗糙度,即摩擦系数的方式,进一步增大其接触时候的摩擦力
21.综上所述,本实用新型具有以下有益效果:
22.当人们需要使用本机械手臂的时候,人们能够通过夹紧组件将其设置在书柜或者推车宽度方向上的外侧,而后通过夹紧组件的夹持端来进行调整,令夹持端能够在其位移轨迹上发生横向位移,从而调整两侧夹持端之间的间距来对书柜或者推车在其宽度方向上进行夹紧,使得本机械手臂得以适配不同的情况,具有较好的实用性能。
附图说明
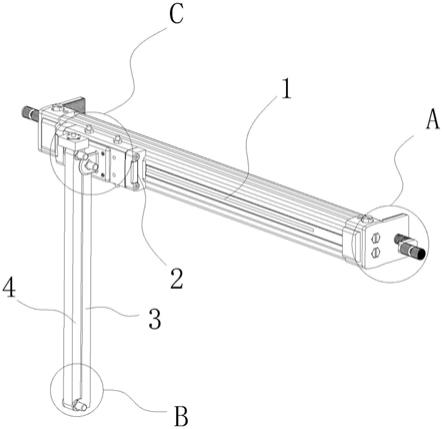
23.图1为本实用新型的结构示意图一;
24.图2为图1中a处的放大图;
25.图3为图1中b处的放大图;
26.图4为图1中c处的放大图;
27.图5为本实用新型的结构示意图二;
28.图6为图5中d处的放大图。
29.图中:1、导轨;2、运动件;21、连接板;22、铰接座;23、电机二;3、连接杆一;31、铰接部;32、电机一;4、连接杆二;41、电机三;5、侧板;6、螺杆;7、偏心块;9、前握把;91、防滑纹;10、螺纹杆;11、后握把;12、软性垫二;121、防滑槽二;13、夹板;14、承接座;141、电机四;15、软性垫一;151、防滑槽一。
具体实施方式
30.下面结合附图和实施例,对本实用新型进行详细描述。
31.实施例:
32.一种用于取放图书的机械手力臂机构,如图1和5所示,包括横向调节机构以及设置在横向调节机构活动端上的机械臂,横向调节机构上设置有夹紧组件,夹紧组件具有两个相对且相向位移的夹持端,且两个夹持端于其位移轨迹上任意位置定位。
33.如图2和6所示,夹紧组件包括固定连接在横向调节机构两端的侧板5以及贯穿侧板5且与其螺纹连接的螺杆6,螺杆6转动连接有位于两块侧板5之间的夹板13,夹板13远离侧板5的一侧固定连接有软性垫一15,软性垫一15采用硅胶或者橡胶材质,软性垫一15上开设有若干防滑槽一151,夹板13的转动轴线与螺杆6的转动轴线相同,并且螺杆6远离夹板13的一端固定连接有偏心设置的偏心块7,偏心块7转动连接有伸缩握把,伸缩握把的伸缩端通过偏心块7自侧板5向外偏转。
34.伸缩握把于其长度变化方向上任意位置维持不变,伸缩握把包括与偏心块7转动连接的前握把9以及与其螺纹连接的后握把11,伸缩握把的最大长度小于等于螺杆6与侧板5的厚度差,前握把9和后握把11的外周壁上开设有若干防滑纹91,前握把9远离偏心块7的一端开设有螺纹孔,后握把11固定连接有螺纹杆10,后握把11与前握把9通过螺纹孔与螺纹杆10螺纹连接,后握把11远离前握把9的一端固定连接有软性垫二12,软性垫二12采用硅胶或者橡胶材质,软性垫二12上开设有若干防滑槽二121。
35.如图3和4所示,横向调节机构包括导轨1以及滑动连接在其上的运动件2,运动件2上通过螺钉连接的连接板21,连接板21远离导轨1的一侧一体成型有铰接座22,机械臂包括转动连接在铰接座22上的连接杆一3、与连接杆一3远离铰接座22一端固定连接的铰接部31、与铰接部31转动连接的连接杆二4以及与连接杆二4远离铰接部31一端的承接座14,连接杆二4通过电机一32与铰接部31转动连接,电机一32固定连接在铰接部31上,且连接杆二4的一端固定连接在电机一32的转动轴上,而铰接座22上固定连接有电机二23,电机二23的转动轴贯穿至铰接座22内,连接杆一3远离铰接部31的一端固定连接在电机二23的转动轴上,而连接杆二4远离铰接部31的一端固定连接有电机三41,承接座14固定连接在电机三41的转动轴上,且承接座14顶面开设有凹槽,凹槽内固定连接有电机四141,电机四141的转动轴远离连接杆二4设置,电机一32、电机二23、电机三41以及电机四141均为伺服电机,且均与plc控制器连接。
36.当人们需要将本机械臂安装在书柜或者推车上的时候,只需要人们通过手动的方式,令两侧的侧板5套在书架或者推车的宽度方向上,而后托住导轨1的同时,通过手动的方式人们握住伸缩握把,握把外周壁上的防滑纹91来增大摩擦力,方便人们进行发力,从而使得人们能够转动伸缩握把从而通过偏心块7来带动螺杆6发生转动,螺杆6在其外周壁的外螺纹导向作用下,螺杆6嵌入到两块侧板5之间,并且由于夹板13与螺杆6转动连接,从而使得夹板13能够在螺杆6的推动下朝向书柜或者推车的宽度方向上的侧壁进行位移,直至软性垫一15能够与书柜或者推车的宽度方向上的侧壁抵触,通过软性垫上的防滑槽一151进一步增大夹板13与书柜或者推车的宽度方向上的侧壁之间的摩擦力,使得两者不容易发生脱落的情况。
37.而最后人们能够根据偏心块7至侧板5之间的间距,人们将伸缩握把调整到位于偏心块7与侧板5之间,人们通过拧动后握把11来带动螺纹杆10发生转动,使得其与前握把9上的螺纹孔发生螺纹连接,直至伸缩握把能够通过软性垫二12与侧板5抵触,并且通过防滑槽二121来增大伸缩握把与侧板5之间的摩擦力,使得两者不容易发生脱离情况,并且软性垫二12能够释放弹性势能来通过伸缩握把和偏心块7来对螺杆6施加向外拉伸的作用力,使得螺杆6咬合更加紧密,不容易发生周向转动而使得本装置脱落。
38.以上所述仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于
上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1